基于PID算法的海工升降平臺自動調平系統
2019-11-28 15:47:09蔣佳利毛澤江
科技創新與應用 2019年31期
關鍵詞:系統
蔣佳利 毛澤江
摘? 要:基于PID算法的自動調平系統是一種操作簡單、自動化程度高,且安全可靠的海工升降平臺自動調平系統。海工升降平臺(Liftboat)在升降過程中,用自動調平技術代替人工手動調平,簡化了升降平臺的調平操作,提高了操作的安全性,同時也大大提高了升降平臺的升降效率。
關鍵詞:自動調平;PID算法;系統
中圖分類號:TP27 文獻標志碼:A 文章編號:2095-2945(2019)31-0059-02
Abstract: The automatic leveling system based on PID algorithm is a kind of automatic leveling system for marine lifting platform, which has the advantages of simple operation, high degree of automation and safety. In the lifting process of the marine Liftboat, the automatic leveling technology is used instead of manual leveling, which not only simplifies the leveling operation of the lifting platform, improves the safety of the operation, but also greatly improves the lifting efficiency of the lifting platform.
Keywords: automatic leveling; PID algorithm; system
引言
現有的海工升降平臺(Liftboat)采用的是人工手動調平技術,即在升降作業過程中,升降平臺(Liftboat)傾斜角度值超過限制值,傾斜超限報警,操作人員立即停止升降作業。切換至單樁升降工況,單獨升降在升降過程中速度過慢的樁腿,當平臺傾斜角度值調節至允許范圍內,人工手動調平完成。切換至多樁聯動升降工況,繼續進行升降作業。[1]在整個升降過程中,多次的調平耗時太多,從而降低了整個升降平臺的工作效率。人工手動調平需要操作人員先根據傾斜角度值來進行調平,這樣對操作人員的操作能力要求高,可操作性不強。而且僅憑傾角角度單一信號,容易造成判斷失誤。[2]
因此,用一種新型的自動調平系統代替傳統的人工調平系統,不僅可以簡化平臺調平操作,提高了操作的安全性,同時也大大提高了工作效率。
1 自動調平系統簡介
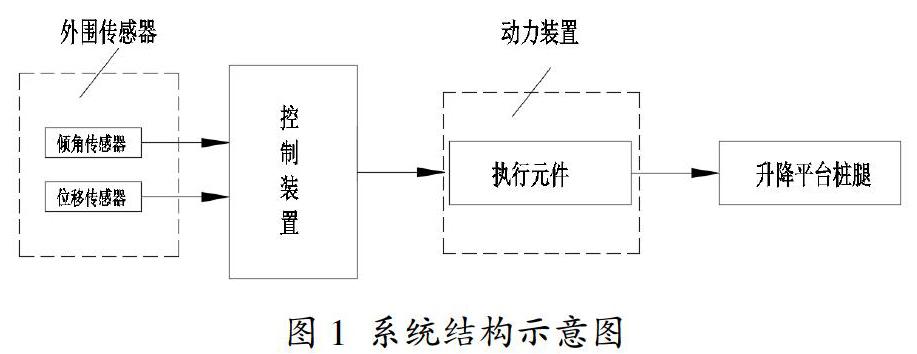
海工升降平臺(Liftboat)自動調平系統由外圍傳感器、控制裝置、執行元件組成,其系統結構示意圖如圖1所示。
2 基于PID算法的自動調平控制邏輯
2.1 自動調平控制邏輯流程框圖
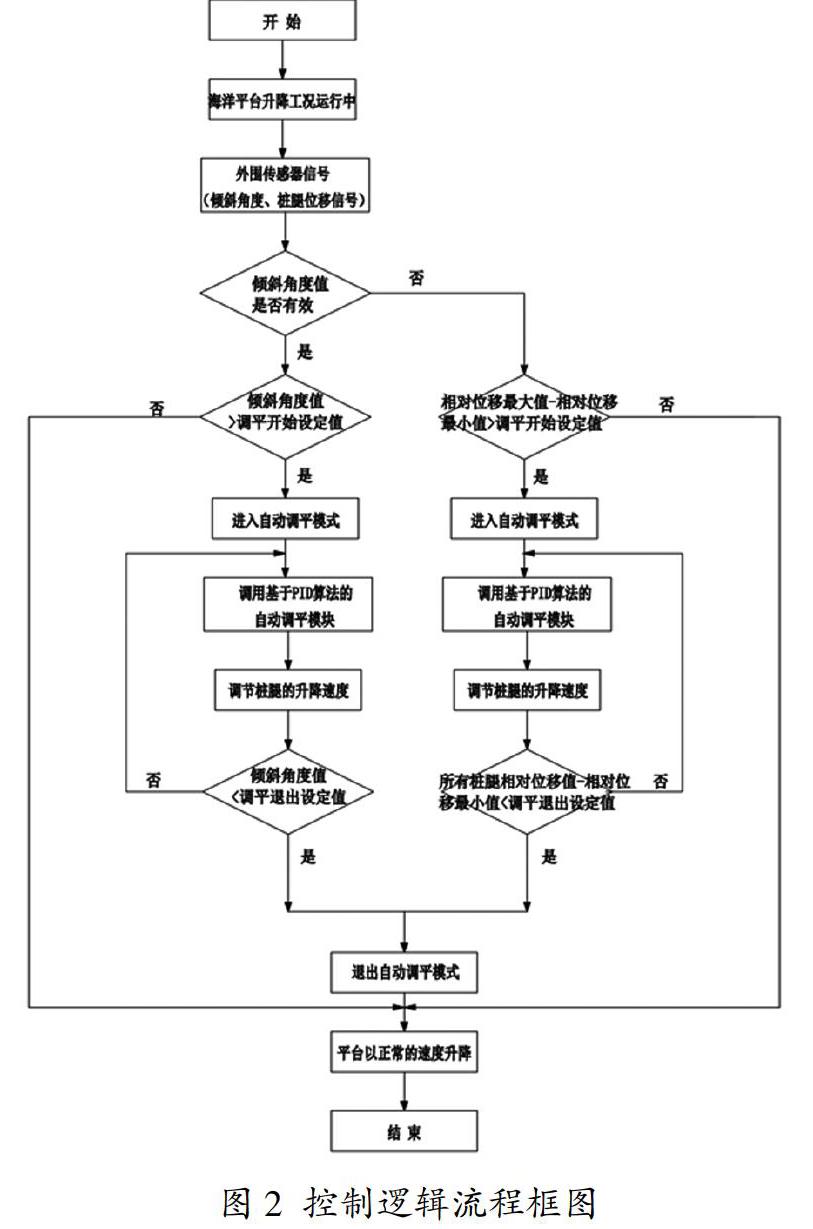
海工升降平臺自動調平系統基于PID算法,根據平臺的傾斜角度值或樁腿位置值來調節整個平臺的傾斜度。控制邏輯流程框圖如圖2所示。
2.2 自動調平控制邏輯
基于PID算法的自動調平控制邏輯包括以傾斜角度值Q作為自動調平判斷信號的控制邏輯和以樁腿相對位置值S作為自動調平判斷信號的控制邏輯,樁腿相對位置值S為冗余信號。
傾斜角度值Q有效時,傾斜角度值Q優先作為自動調平的判斷信號;若傾斜角度值Q失效時,自動切換用樁腿相對位置值S作為自動調平的判斷信號。
2.2.1 基于傾斜角度信號的自動調平邏輯控制
(1)調速樁腿的確定
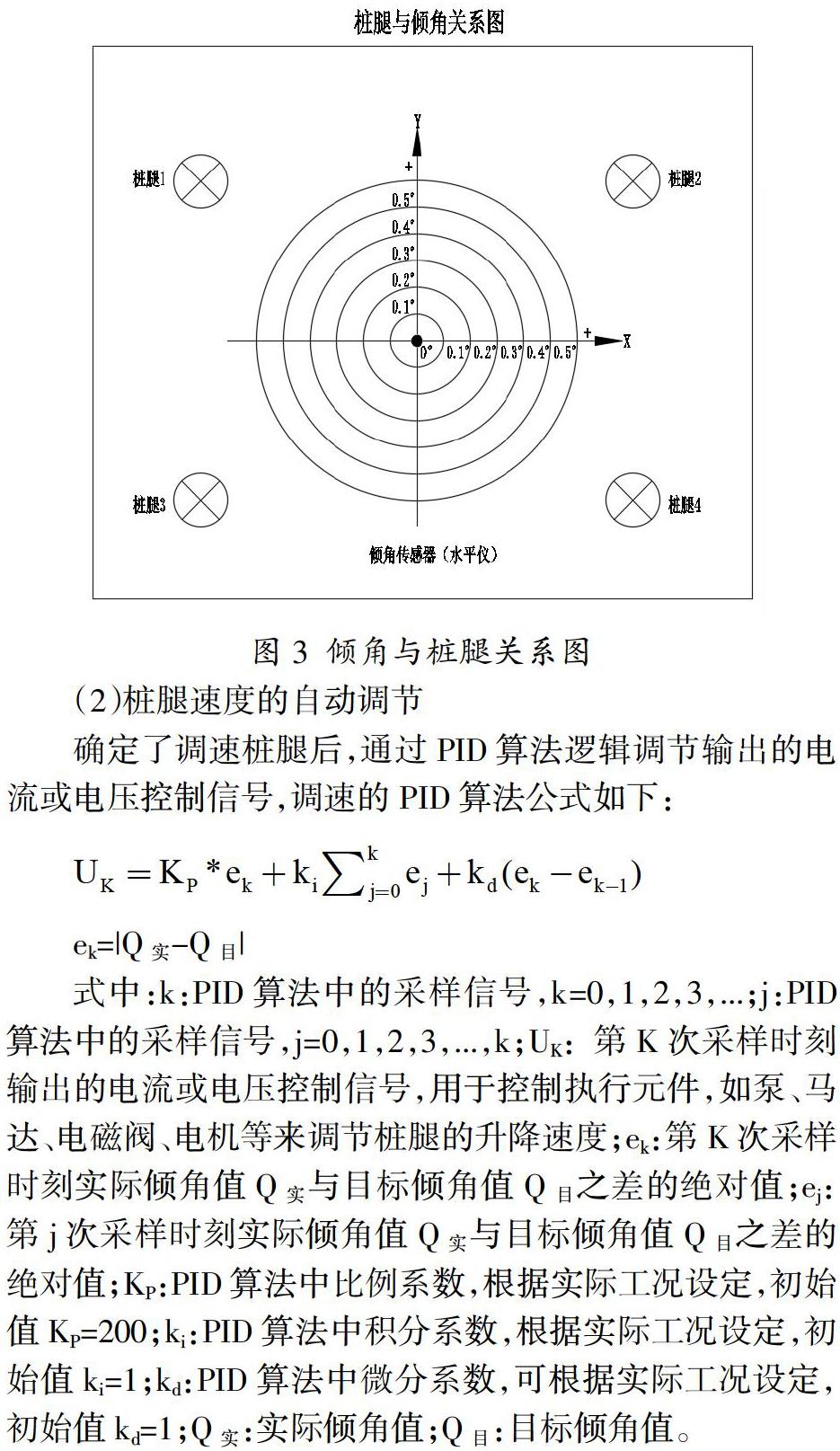
根據平臺傾斜角度限制值Q先確定升降速度過快需要調速的樁腿;傾角與樁腿關系圖如圖3所示,樁腿按順時針方向分別為樁腿1、2、3、4,QX為X軸傾斜角度值,QY為Y軸傾斜角度值,根據樁腿與傾角的關系圖,平臺上升工況,若QX>傾角限制值Q,樁腿2、4上升速度過快;若QX<-傾角限制值Q,樁腿1、3上升速度過快;若QY>傾角限制值Q,樁腿1、2上升速度過快;若QY<-傾角限制值Q,樁腿3、4上升速度過快;平臺下降工況,若QX>傾角限制值,樁腿1、3下降速度過快;若QX<-傾角限制值Q,樁腿2、4下降速度過快;若QY>傾角限制值Q,樁腿3、4下降速度過快;若QY<-傾角限制值Q,樁腿1、2下降速度過快。
(2)樁腿速度的自動調節
確定了調速樁腿后,通過PID算法邏輯調節輸出的電流或電壓控制信號,調速的PID算法公式如下:
ek=|Q實-Q目|
式中:k:PID算法中的采樣信號,k=0,1,2,3,...;j:PID算法中的采樣信號,j=0,1,2,3,...,k;UK:第K次采樣時刻輸出的電流或電壓控制信號,用于控制執行元件,如泵、馬達、電磁閥、電機等來調節樁腿的升降速度;ek:第K次采樣時刻實際傾角值Q實與目標傾角值Q目之差的絕對值;ej:第j次采樣時刻實際傾角值Q實與目標傾角值Q目之差的絕對值;KP:PID算法中比例系數,根據實際工況設定,初始值KP=200;ki:PID算法中積分系數,根據實際工況設定,初始值ki=1;kd:PID算法中微分系數,可根據實際工況設定,初始值kd=1;Q實:實際傾角值;Q目:目標傾角值。
基于PID算法的自動調平模塊根據實際傾角值與目標傾角值之差的絕對值ek,實時輸出電流或電壓控制信號UK,控制執行元件來調節樁腿的升降速度;當升降平臺傾斜角度絕對值小于調平停止設定值,控制系統退出自動調平模式,平臺按正常升降速度進行升降。
2.2.2 基于樁腿相對位置信號的自動調平邏輯控制
當傾斜角度值Q失效時,自動切換用樁腿相對位置值S作為自動調平的判斷信號,控制邏輯流程如下:
(1)調速樁腿的確定
實際相對位移值S實與相對位移最小值Smin之差ek大于調平開始設定值,平臺進入自動調平模式。
(2)樁腿速度的自動調節
以相對位移最小值Smin的樁腿為基準,通過PID算法邏輯調節輸出的電流或電壓控制信號,調速的PID算法公式如下:
Ek=S實-Smin
式中:k:PID算法中的采樣信號,k=0,1,2,3,...;j:PID算法中的采樣信號,j=0,1,2,3,...,k;UK:第K次采樣時刻輸出的電流或電壓控制信號,用于控制執行元件,如泵、馬達、電磁閥、電機等來調節樁腿的升降速度;Ek:第K次采樣時刻樁腿實際相對位移值S實與相對位移最小值Smin之差;Ej:第j次采樣時刻樁腿實際相對位移值S實與相對位移最小值Smin之差;KP:PID算法中比例系數,根據實際工況設定,初始值KP=50;ki:PID算法中積分系數,根據實際工況設定,初始值ki=1;kd:PID算法中微分系數,可根據實際工況設定,初始值kd=1;S實:樁腿實際相對位移值;Smin:樁腿相對位移最小值。
基于PID算法的自動調平模塊根據樁腿實際相對位移值S實與相對位移最小值Smin之差Ek,實時輸出電流或電壓控制信號UK,控制執行元件來調節樁腿的升降速度。
當所有樁腿實際相對位移值S實與相對位移最小值Smin之差小于調平停止設定值,所述調平停止設定值可根據實際工況設定,控制系統退出自動調平模式,平臺按正常升降速度進行升降。
3 結論
基于PID算法的海工升降平臺自動調平系統的優勢在于海工升降平臺(Liftboat)在升降作業時,邊升降邊調平,無縫對接,無須操作人員值守,從而簡化了海工升降平臺(Liftboat)調平操作,操作更加簡單,自動化程度高;平臺傾斜角度值始終保持在安全允許的角度范圍內,提高了升降系統的安全可靠性。
參考文獻:
[1]孫東昌,潘斌.海洋自升式移動平臺設計與研究[M].上海:上海交通大學出版社,2008:22-26.
[2]黃維學,劉放.自升式海上鉆井平臺升降系統技術特點分析[J].設計與計算,2011(2):69-71.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
