基于改進型量子粒子群優化算法的汽輪機流量特性優化研究
2019-12-04 06:51:22雷志偉武海澄周海雁闞俊超
熱力發電 2019年11期
雷志偉,張 興,武海澄,周海雁,闞俊超,李 達
(中國大唐集團科學技術研究院有限公司華東電力試驗研究院,安徽 合肥 230031)
汽輪機流量特性是指機組主蒸汽流量指令與主蒸汽流量間的函數關系,是機組協調控制、涉網性能調節、安全穩定運行等方面[1]的重要特性。汽輪機流量特性不佳會影響發電機組運行的安全性[2-3]、經濟性[4]和穩定性。目前,常見的汽輪機高壓進汽部分由2 個、4 個或6 個高壓調節閥組成,其運行方式分為單閥運行和順序閥運行。為了提高機組中低負荷段發電效率,通常采用順序閥運行方式。
電網深度調峰和深度節能工作的持續推進,對傳統火電機組提出更大考驗。通過汽輪機流量特性優化,進一步挖掘汽輪機節能潛力,提升汽輪機進汽流量控制的穩定性和快速性,有利于促進火電機組主要調節系統調節品質的改善。
近年來,國內外學者及工程師在汽輪機流量特性領域進行了相關研究。張銳鋒等[5]通過調節閥流量特性測試與仿真驗證相結合的方法,優化其線性度和連續性,取得了一定效果。王剛等[6]采用K-Medoids 算法,以歷史數據挖掘為基礎,提出了一種新的汽輪機流量特性線性優化方法,極大地節省了優化時間和精力。文樂等[7]利用動態數據挖掘,實現了汽輪機調節閥流量特性的實時在線計算。文獻[8]采用基于模型自適應算法,實現汽輪機流量特性的自動優化,解決了其線性度自動優化的難題。
汽輪機流量特性不僅與閥門本體、汽輪機通流部分結構、調節級臨界壓比等有關,還與閥門配汽函數、蒸汽溫度等實際運行參數有關。當某種因素造成汽輪機流量特性不匹配時,需要重新優化閥門配汽函數,以改善汽輪機流量特性和提高機組節能潛力。本文以挖掘機組節能潛力與優化汽輪機流量特性線性度為雙目標,提出基于改進型量子粒子群優化算法(quantum-behaved particle swarm opti mization algorithm,QPSO)[9]的汽輪機流量特性節能優化技術;通過智能群體尋優技術和高精度的汽輪機流量特性仿真模型,解決困擾該技術領域閥門重疊度與汽輪機流量特性線性度耦合的優化難題。
1 汽輪機流量特性數學模型
1.1 汽輪機流量控制模型
圖1是常見汽輪機閥門控制程序流程。機組流量指令經調節閥控制系統函數依次映射,輸出各個調節閥開度指令,用以控制汽輪機主蒸汽流量。
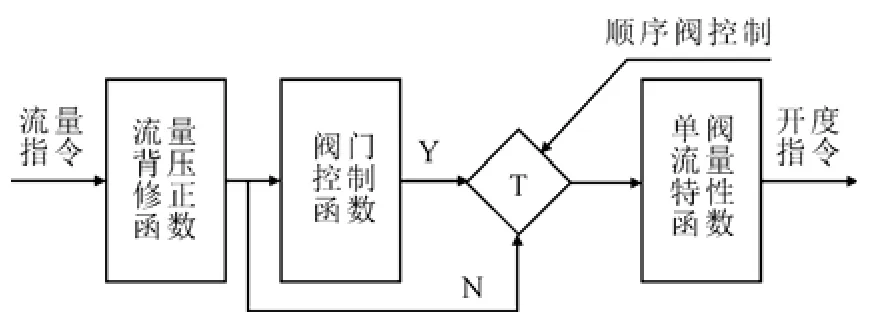
圖1 機組流量生成示意Fig.1 Schematic diagram of the unit flow generating
汽輪機閥門控制程序可以視為一個單輸入單輸出的非線性系統[10]。該系統的輸入X為機組流量指令,通常X∈[0,100];系統的輸出為機組的蒸汽流量G。機組在順序閥運行方式下,汽輪機閥門流量函數G的表達式為

式中:N為機組閥門數量;Wi(·)為第i個閥門流量的權值函數,Wi(X)?(0,1);Fi(·)為第i個閥門的單閥流量特性函數,是指通過試驗獲取的每個閥門的閥門開度-流量函數;Hi(K)(·)為數字電液控制系統(DEH)中第i個調節閥的第K個閥門控制函數;K值與DEH 的結構類型有關,通常K∈{1,2,3}。
由式(1)可知:通過若干個插值函數的非線性映射后,模型輸出汽輪機閥門的總體流量;在順序閥方式下,機組流量特性函數G與DEH 閥門控制函數H、單閥流量特性函數F、權值函數W息息相關。
1.2 主蒸汽相對流量計算
通常根據汽輪機流量特性測試數據建立數學模型。汽輪機主蒸汽相對流量是指機組在某一流量指令下,經過汽輪機閥門的蒸汽流量占機組總流量(流量指令為100%時)的百分比。其計算方法建立在流量特性試驗測量或數據挖掘[7,11]的基礎上,但無論哪一種,基本采用弗留格爾[12]近似公式
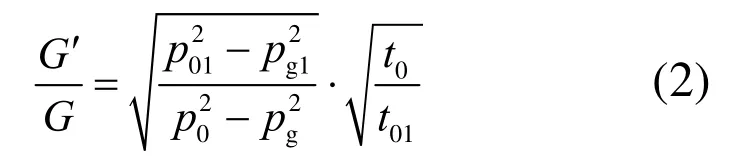
式中:G′分別為變工況前后總流量,p01、p0,t01、t0和pg1、pg分別為變工況前后調節級蒸汽壓力、蒸汽溫度和高壓缸排汽壓力。對于超(超)臨界機組,在不同負荷段下,閥門蒸汽溫度變化比較大,需要加以修正。
汽輪機流量特性數學模型描述的是機組流量指令與相對流量的函數關系。結合式(1)、式(2),可以建立較高精度的汽輪機流量特性數學模型,用以描述當前機組流量特性的優劣狀況。
2 改進型QPSO 的雙目標優化
由式(1)可以看出,在順序閥方式下,各個閥門開啟次序由其閥門控制函數決定。本文在優化前先將幾個閥門控制函數整合為1 個單值函數H,以便于優化算法的分析和計算。閥門重疊度是指當前一個閥門開度達到100%時,后一個閥門所開啟的開度值,其大小與閥門控制函數H有關。
為了優化汽輪機閥門流量特性和挖掘機組節能潛力,需要同時解決閥門重疊度與流量特性線性度的雙目標優化問題。
2.1 改進型QPSO
QPSO 是一種基于智能群體協作的全局優化算法。群體中的每一個粒子均具有量子行為特性,該特性是指在某種吸引勢能場中,粒子以一定的概率密度出現在定義空間中的任意位置。在收斂的過程中,粒子不斷靠近群體中的吸引子,直到落入其中,整個群體具備聚集性特征[13-14]。QPSO 相較于其他智能群體算法,具有較強的魯棒性和較快的收斂速度。本文通過改進型QPSO 適應度函數和位置更新公式,使新算法能夠同時兼顧雙目標優化的特點。
設定QPSO 中的種群數為M,其隨機分布在1 個Dim 維的目標尋優空間中。該空間中的粒子個體最優位置zi=(zi1,zi2,…,ziDim),i=1,2,…,M,而此時QPSO 全局最優位置si=(si1,si2,…,siDim),i=1,2,…,M。搜索過程中,不斷記錄此時群體中粒子最優解zbest和全局最優解sbest。引入群體中所有粒子個體最優位置的平均值,記為meanz,表示種群zbest的中間位置,其表達式為
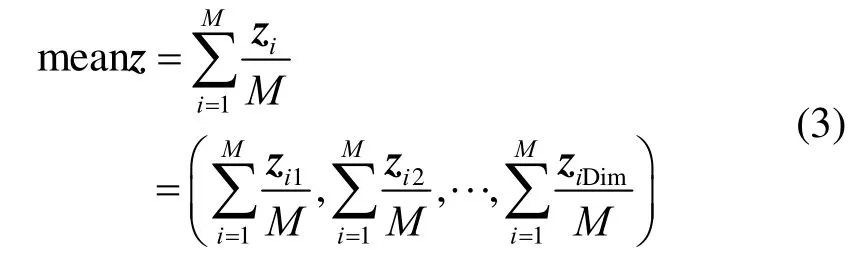
式中,zi為第i個粒子的個體最優位置zbest。
根據粒子此時的個體最優位置和全局最優解得出吸引子Y的位置,記為

式中,為(0,1)之間的隨機數。
結合式(3)、式(4),位置更新公式為

式中:t為當前迭代次數,T為最大迭代次數,u(t)為(0,1)上的均勻分布的概率密度函數;引入收縮膨脹因子,控制單個粒子的收斂速度,同時為了提高單個粒子的收斂性,的數值一般不大于1.782。
量子粒子群中的粒子在尋優的過程中容易局部收斂。為了防止粒子過早陷入局部最優解[15],在原有QPSO 的基礎上進行改進,強調在尋優初期拓展粒子的搜尋范圍。因此,在計算個體最優位置時,加入1 個擾動量,

式中為擾動調整因子。
根據需要,合理選擇擾動調整因子,使得加入的擾動量既不影響尋優的方向,又能避免陷入局部最優。
在循環迭代中,群體中的粒子不斷地靠近吸引子的位置,直至落入其中。在達到最大迭代次數或誤差精度后,輸出群體的全局最優值sbest。
2.2 改進型QPSO 的適應度函數
順序閥方式下,汽輪機流量特性的線性度由控制函數H、流量權值函數W、單閥函數F決定,流量權值函數W和函數F由流量特性試驗獲得。
為了兼顧流量特性線性度和閥門重疊度的雙目標優化,改進型QPSO 事先隨機搜索閥門重疊度θ,再計算當前重疊度進行流量特性線性度優化。θ由控制函數H決定:

線性度目標函數[16]D一般可采用一維線性函數、正比例函數等。根據式(7)的重疊度對D進行分段優化,分別對應各個閥門所控制的流量區間Di。結合式(1),汽輪機流量特性線性度優化計算式為


式中,、為雙目標權值系數,一般、[0,1],用于調整雙目標之間性能指標的權重。
改進型QPSO 的雙目標優化算法,經過多次循環迭代后,或當適應度函數值J達到精度要求0.05(滿足生產需求)時,輸出最優控制函數H和閥門重疊度θbest,能夠在實現汽輪機流量特性線性度優化的同時,實現閥門重疊度和機組節能優化。算法流程如圖2所示。
3 閥門流量特性優化
3.1 機組特性分析
某電廠1 號機組DEH 采用4 個閥門控制汽輪機進汽流量,其順序閥次序為GV1/GV2-GV3-GV4。DEH 閥門控制函數采用折線函數。優化前,DEH閥門控制函數見表1,閥門控制函數曲線如圖3所示。經計算,GV1/GV2 與GV3 重疊度(重疊度1)達到100%,GV3 與GV4 重疊度(重疊度2)為16.62%,即GV1 和GV2 在整個行程下均有節流情況。在順序閥方式下,測試機組汽輪機流量特性[17],并按照 式(2)計算機組相對流量,測試結果如圖4所示。由圖4可見:曲線斜率變化較大,整體線性度不佳;其與線性度目標函數(D(X)=X)的標準差約為3.554%。

圖2 算法流程Fig.2 The flow diagram of the algorithm
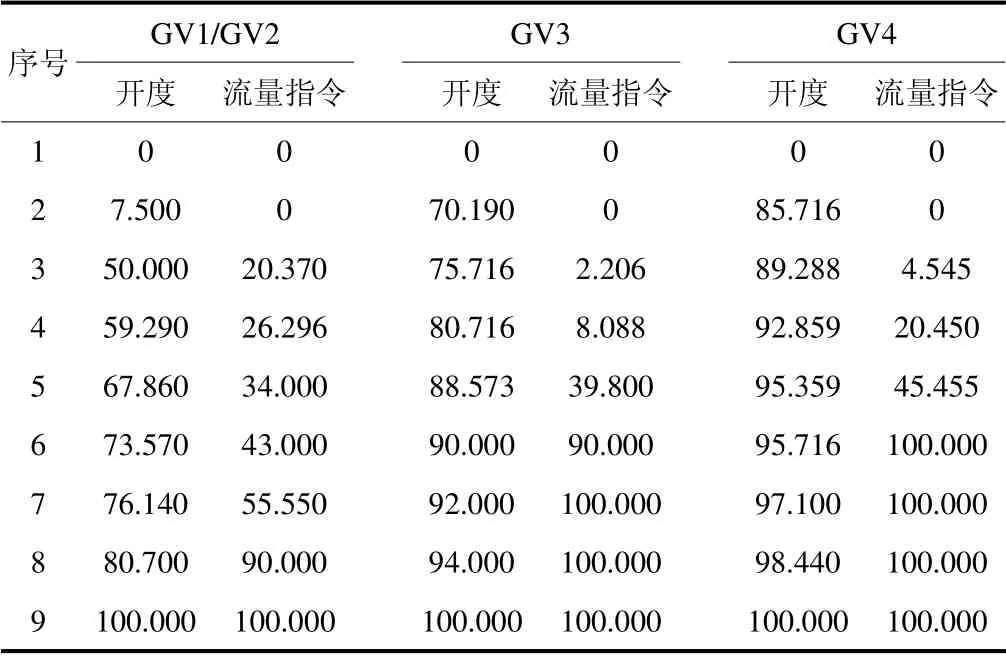
表1 優化前DEH 閥門控制函數Tab.1 The DEH valve control function before the optimization %
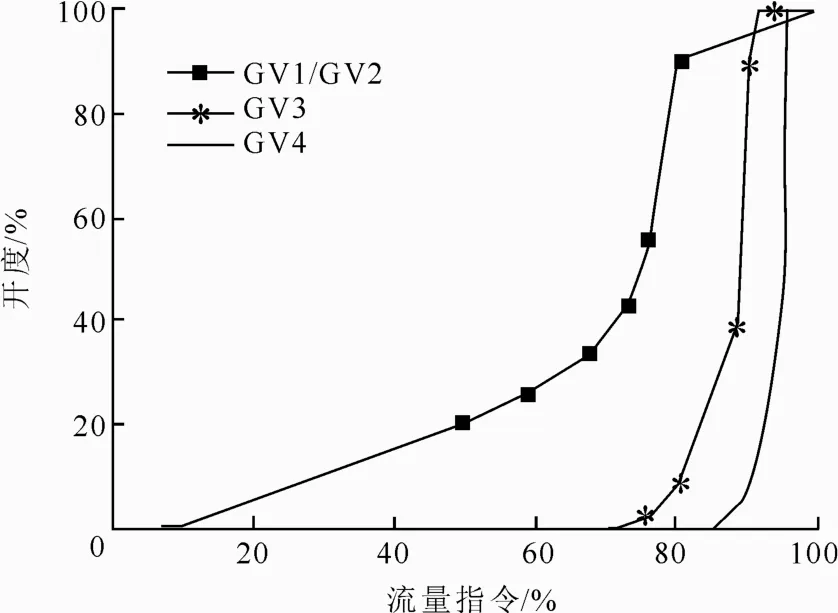
圖3 優化前DEH 閥門控制函數曲線Fig.3 The curves of DEH valve control function before the optimization
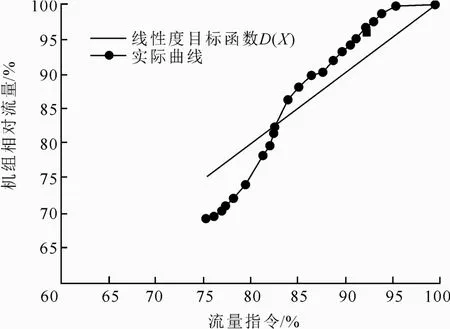
圖4 優化前閥門流量特性Fig.4 The valve flow characteristics before the optimization
3.2 仿真優化
3.2.1 構造解空間
利用改進型QPSO 雙目標優化算法,根據3.1測得的汽輪機流量特性試驗數據建立仿真優化模型。結合圖3閥門控制函數的曲線特征,GV1 與GV2 的控制函數H1=H2,構造粒子群的解空間A,

結合實際機組運行及閥門結構限制,閥門之間的重疊度越小,越容易造成在重疊區間閥門晃動、機組功率振蕩等不穩定工況[18-19],因此需要對重疊度加以限制,本文采用5%≤θ≤15%。
3.2.2 不同擾動調整因子下的收斂性對比
擾動調整因子μ的取值影響改進型QPSO 的收斂性。為了使算法快速收斂且雙目標函數J滿足精度要求,實現汽輪機流量特性線性度與重疊度優化,對不同u時雙目標函數J的變化趨勢進行討論。
設置種群數M=200,最大迭代次數T=5 000,選取a=1.6、λ=1.0、р=0.1、Dim=2。在=1、0.1、0.01 時進行順序閥方式下的仿真優化,各項指標如重疊度1、重疊度2、流量特性與目標函數的標準差||G-D||和雙目標函數J對比情況見表2。由表2可見:當值取過大或過小時,造成算法尋優前期的擾動量過大或不起作用,使量子粒子群極易陷入局部最優解,無法取得較好的優化效果。因此,u值一般取0.05~0.5。
表2 不同值下仿真對比Tab.2 The simulation results with different values
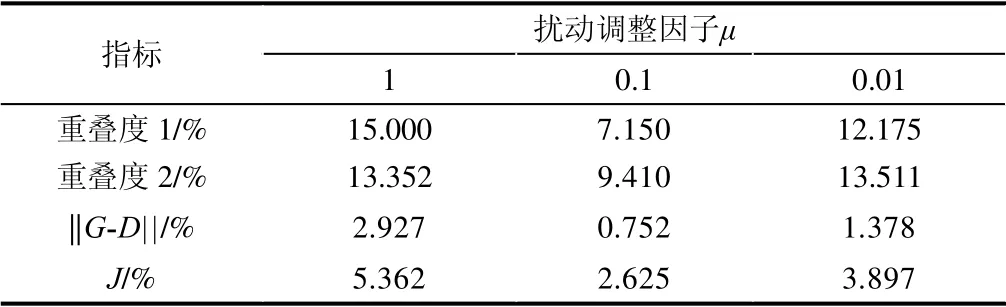
表2 不同值下仿真對比Tab.2 The simulation results with different values
指標 擾動調整因子μ 1 0.1 0.01重疊度1/% 15.000 7.150 12.175重疊度2/% 13.352 9.410 13.511||G-D||/% 2.927 0.752 1.378 J/% 5.362 2.625 3.897
圖5為當=0.1 時,優化后的DEH 閥門控制函數曲線,對應數據見表3。
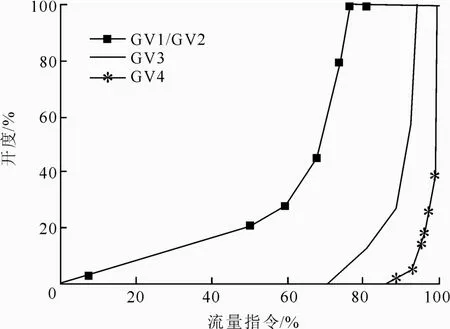
圖5 優化后DEH 控制函數曲線Fig.5 The curves of DEH valve control function after the optimization

表3 優化后DEH 閥門控制函數Tab.3 The DEH valve control functions after the optimization %
計算可知:GV1/GV2 與GV3 的重疊度為7.150%,GV3 與GV4 的重疊度為9.410%,相較于原閥門重疊度均減小,線性度也得到了改善,滿足優化精度0.05 的要求。
3.3 實際應用
為了驗證仿真優化的實際效果,將表3中的函數應用至1 號機組DEH 閥門管理程序中。
優化后對機組開展汽輪機流量特性測試工作,并根據式(3)計算主蒸汽流量,測試結果如圖6所示。由圖6可知,優化后,實際汽輪機流量特性曲線與線性度目標函數D的標準差為0.969%,與仿真結果相差無幾。考慮到實際生產中的數據精度和噪聲等因素,該結果能夠滿足生產需求。基于改進型QPSO 的雙目標優化算法,結合了汽輪機流量特性線性度和閥門重疊度的雙優化,消除了原有汽輪機流量特性曲線突變,提升了整體流量控制的線性度,驗證了仿真優化的效果。

圖6 優化后閥門流量特性Fig.6 The valve flow characteristics after the optimization
4 閥門流量特性節能分析
4.1 主蒸汽壓損分析
為了進一步分析優化后的節能情況,采集1 號機組在汽輪機流量特性試驗工況下的主要參數,用以對比優化前后汽輪機主蒸汽壓損的變化情況,結果如圖7所示。
在高負荷區間,由于調節閥基本處于全開狀態,由閥門節流產生的蒸汽壓損情況基本相當;但是在中低負荷段,由于優化后各閥門間的重疊度降低,GV1 和GV2 開度相較于優化前大,節流損失減少,因此優化后的主蒸汽壓損顯著減小,蒸汽品質得到提升。
同時從圖7可以看出,機組流量指令在75%~100%的運行區間時,主蒸汽壓力波動值較優化前減小,有利于提高機組負荷、主蒸汽壓力等自動控制的品質。因此,改進型QPSO 的汽輪機流量特性節能優化效果較好。
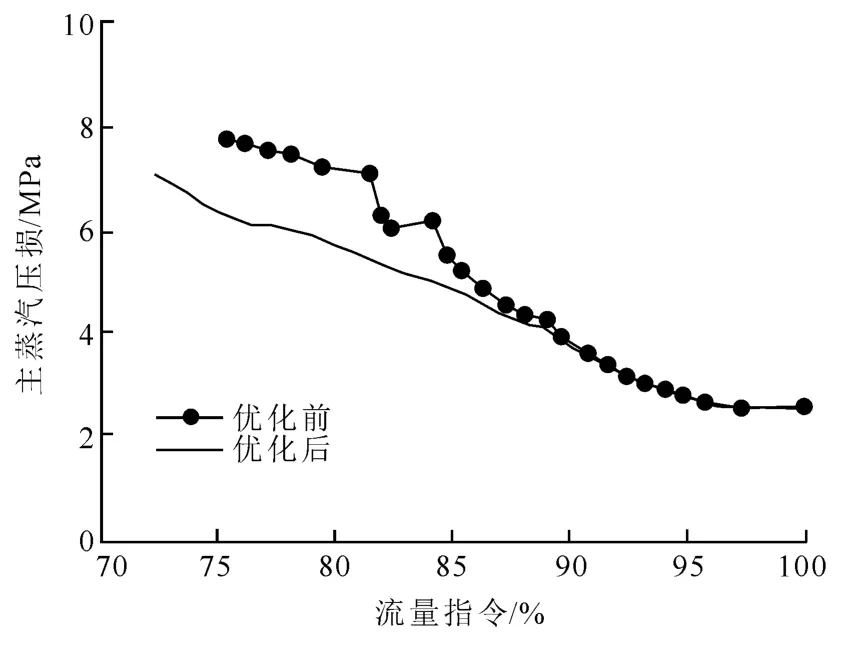
圖7 主蒸汽壓損分析Fig.7 The main steam pressure loss analysis result
4.2 汽輪機熱耗率分析
進一步分析汽輪機流量特性優化后的節能效果,計算和對比優化前后汽輪機熱耗率的變化情況[20]。大多數機組給水流量測點較主蒸汽流量測點可靠,因此采用以給水流量為基準值計算熱耗率。高壓加熱器(高加)及除氧系統示意如圖8所示。
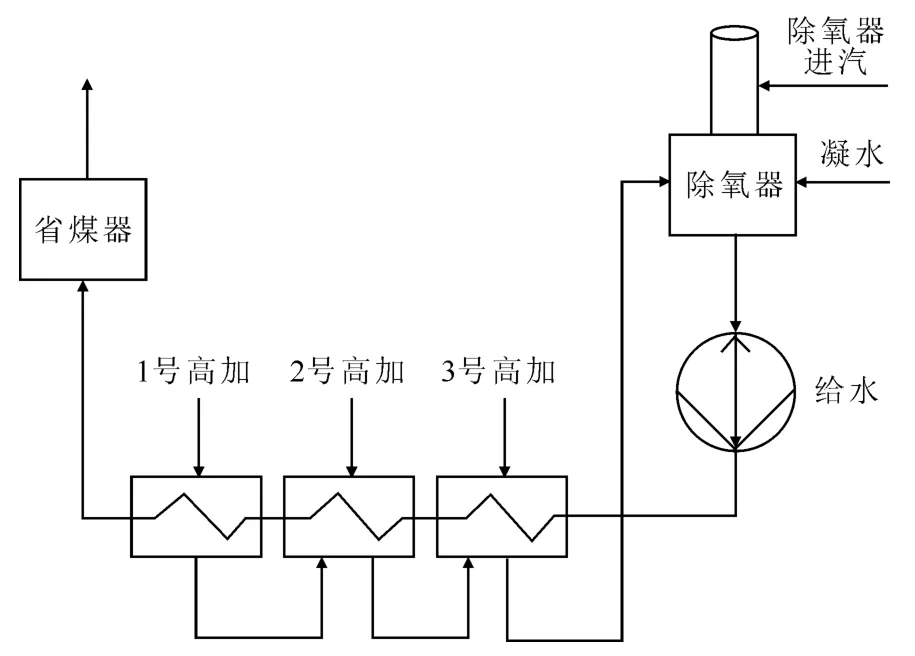
圖8 高加及除氧系統示意Fig.8 Schematic diagram of the high pressure heater and deaerator system
通過除氧器、高加等設備上對應的參數測量和計算,確定主蒸汽流量和再熱蒸汽流量;針對再熱回熱式汽輪機,進行高加熱平衡計算,得出各高加和除氧器的抽汽量和最終給水流量;查詢各工質焓值,可計算出試驗熱耗率HR,其計算公式為[12]

式中,Dm為主蒸汽質量流量,t/h;Dr為再熱蒸汽流量,t/h;Dfw為給水流量,t/h;Dcr為冷再熱蒸汽流量,t/h;Dshs為過熱減溫水流量,t/h;Drhs為再熱減溫水流量,t/h;hm為主蒸汽焓,kJ/kg;hr為再熱蒸汽焓,kJ/kg;hfw為給水焓,kJ/kg;hcr為冷再熱蒸汽焓,kJ/kg;hshs為過熱減溫水焓,kJ/kg;hrhs為再熱減溫水焓,kJ/kg;Pe為汽輪機組功率,MW。
采集優化前后機組日常運行時,各個穩態負荷段下的主要參數。優化后,機組在400 MW 工況下的主要工質焓值見表4。通過表4等數據,根據式(11)計算出機組的平均熱耗率,優化前后機組熱耗率對比如圖9所示。

表4 優化后400 MW 工況下主要工質焓值Tab.4 The enthalpy of main working fluids at 400 MW load after the optimization kJ/kg
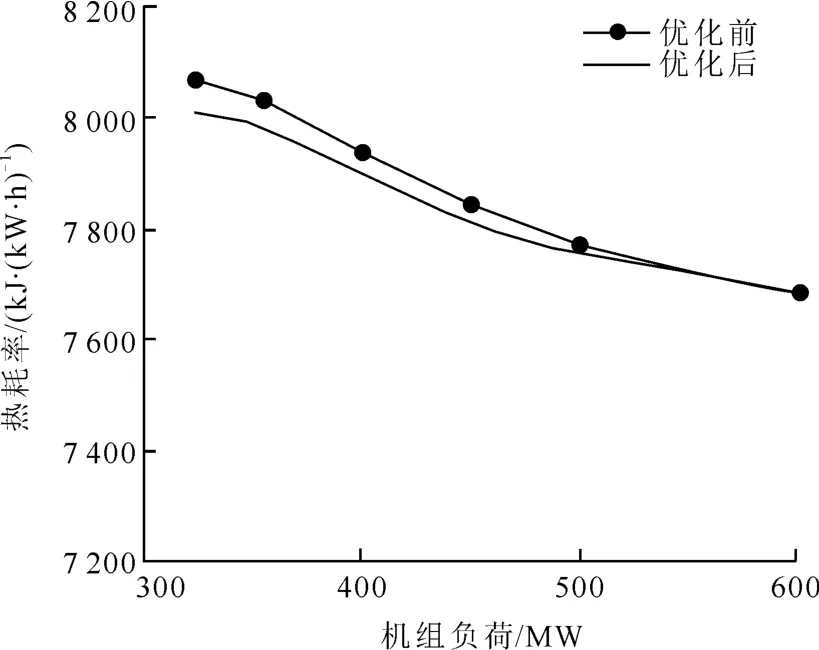
圖9 機組熱耗率對比Fig.9 The unit heat rates before and after the optimization
對比分析圖3和圖5可以看出:在流量指令60%~80%,優化前GV1/GV2 開度處于30%~50%,此區間閥門流量變化較大,節流損失大;而優化后由于重疊度和閥門控制函數得到優化,GV1/GV2開度處于35%~100%,使得節流損失較小。因此,優化后,中低負荷段閥門節流損失減少,在該負荷區間汽輪機熱耗率平均降低了約34.31 kJ/(kW·h),節能效果較為明顯(圖9)。
5 結 論
1)本文提出改進型QPSO 的雙目標優化算法,實現汽輪機流量特性線性度和重疊度的雙重優化。在某電廠1 號機組應用后,汽輪機流量特性得到明顯的改善,閥門間重疊度降低。
2)通過對比試驗工況下優化前后的主蒸汽壓損數據表明,在中低負荷段下機組主蒸汽壓損得到顯著地減小。
3)通過對比優化前后機組在正常運行時各個穩態負荷段下的汽輪機熱耗率表明,優化后在中低負荷段下,機組節流損失減小,汽輪機熱耗率明顯降低。
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:08
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
煤氣與熱力(2021年3期)2021-06-09 06:16:18
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
能源工程(2020年5期)2021-01-04 01:29:00
廣西電力(2016年4期)2016-07-10 10:23:38
工業設計(2016年4期)2016-05-04 04:00:23
中學科技(2014年11期)2014-12-25 07:38:53
