時頻系統數字鎖相技術研究
2019-12-05 02:37:06王鵬宇楊志剛鄭麗麗
宇航計測技術 2019年5期
關鍵詞:信號
王鵬宇 楊志剛 鄭麗麗
(中國電子科技集團公司第二十七研究所,河南鄭州 450047)
1 引 言
隨著航天測控系統的發展,測量設備對頻率標準的精度(準確度)和穩定度要求越來越高。通常情況下基于單一銣鐘頻率源的頻標基準,其準確度指標很高,但短期穩定度一般不高;而基于單一晶振頻率源的頻標基準,雖然能夠達到很好的短期穩定度,但準確度又不高。為全面提高頻標基準的長短期穩定度指標,目前一般采用基于GPS馴服、鎖相技術的解決方案。
鎖相環的設計主要考慮穩定性、帶寬和噪聲性能[1,2]。頻標基準最早采用的是模擬鎖相環,由本振跟蹤外參考頻率信號。模擬鎖相環的特點是成熟、可靠性好、鎖定速度快;但參數設置不靈活,分析困難,一致性較差,不能跟蹤1PPS時間基準信號。
隨著衛星導航系統的出現,上世紀90年代初提出了利用衛星導航系統提供的1PPS時間基準信號馴服本地頻率源的方案,這樣可以使本地時統設備的1PPS精度和10MHz信號的長期穩定度溯源到衛星導航系統的時間基準上。本文即討論外部1PPS或10MHz頻率信號馴服銣鐘或晶振的數字二階/三階鎖相環結構,建立了頻標模塊的仿真模型,給出了參數設置依據、仿真及硬件測試結果,驗證了模型的正確性。
2 頻標模塊模型
時頻系統中的頻標模塊結構如圖1所示,其主要功能是對外提供具有高精度和高穩定度的10MHz頻率信號和1PPS時間基準信號。當指標要求不是很高時,也可由GPS/BD(北斗)的1PPS信號直接馴服晶振,如圖1中虛線所示。

圖1 頻標模塊結構組成框圖Fig.1 Frequency standard component structure
數字鎖相環主要利用1PPS脈沖進行鑒相(10MHz信號可分頻出1PPS脈沖),因此以1s時間間隔作為相位2π,環路中用待馴服銣鐘/晶振等頻率源倍頻至f0后分出1PPS與參考輸入1PPS之間的時間差進行采樣,所以,相位差Δφ與采樣計數N及f0之間的關系為
(1)
而相位差也可以用時間差來表示為
(2)
頻標模塊的仿真模型如圖2所示。

圖2 頻標模塊仿真模型組成框圖Fig.2 Frequency standard component simulation model
2.1 待馴服頻率源模型
待馴服頻率源建模主要考慮的是自身噪聲和老化率。以高穩晶振為例,若10MHz晶振秒穩優于5E-13,相當于頻率穩定度標準差最大為5E-6Hz,即頻率變為10 000 000.000 005Hz,換算成秒時間周期為0.999 999 999 999 5s,變化了5E-04ns,即可以將晶振建模為標準差為5E-04ns相位累加器。
晶振的老化率為[3]
(3)
式中:fx(t)——被測頻率的瞬時值;fr(t)——參考頻率的瞬時值;fx0——兩者頻率的標稱值;τ——平均時間。
為了便于仿真,令
fr(t)=fx0
且
fx(t)>fr(t)
所以,若按晶振日老化率為1×10-10/d,則有
即
fx(t)-fx0=fx0×10-10/(3 600×24)Hz/s
若晶振標稱頻率為10MHz,則可得本振相位變化率為
107×10-10×2π/(3 600×24)=7.272 2E-8rad/s
2.2 GPS/BD 1PPS信號模型
假設GPS/BD接收機的授時精度優于20ns(1σ),則輸入1PPS信號相位抖動的標準差為1.256 6E-7rad。設環路啟動初始時間差500ns,即相位差3.141 6E-6rad。
2.3 鎖相環結構
當系統采樣率ws達到ws>10wc(wc為穿越頻率)時,數字鎖相環可以由一個模擬鎖相環通過同步采樣來獲得[4]。經過推導,二階鎖相環的數字化結構如圖3所示。
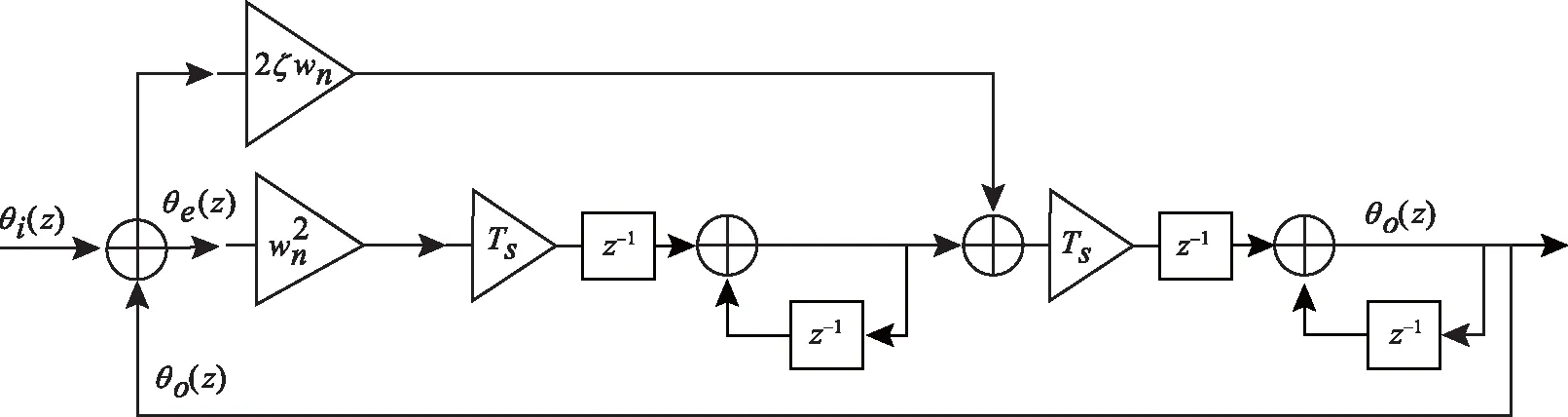
圖3 二階數字鎖相環示意圖Fig.3 2 order digital PLL
圖3中,θi(z)為輸入相位,θo(z)為本振輸出相位,θe(z)為相位差,它們的單位均為弧度。ζ和wn是二階控制系統的固有頻率和阻尼,Ts為環路更新周期。二階鎖相環的等效噪聲帶寬BL可以表示為
(4)
式(4)中,wn的單位為rad/s,而BL的單位為Hz。綜合考慮環路動態性和響應時間,一般ζ取0.707,因此二階環路的可控參數只有環路帶寬BL。又因為ws>10wc,可導出ws>30BL,即
(5)
式(5)給出了頻標模塊鎖相環噪聲帶寬的上限。
頻標模塊的主要任務是對外提供高精度1PPS信號,通常要與GPS/BD接收機給出的1PPS信號一致。而當環路帶寬較窄時,由于晶振老化率的影響,造成二階環路鎖定后的鑒相輸出不為零,即本振輸出1PPS信號與參考輸入1PPS信號的相位不一致。此時可以采用三階鎖相環,如圖4所示[5,6]。

圖4 三階數字鎖相環Fig.4 3 order digital PLL
圖4中,環路增益k′1,k′2,k′3由式(6)確定
k′1=(k+2)ζwn
(6)
考慮到環路穩定性,需滿足k>0,ζ>0.25。而為了使環路動態性能可以由二階系統近似,要求k>5。當k=6時,可以得到BL與ζ,wn之間的簡單關系。此時,BL可以由式(7)近似估算
BL=(2.037ζ+0.1036)wn(ζ>0.2)
(7)
當ζ=0.707時,三階環路性能也可以只通過環路帶寬BL來控制。
開環、二階環路、三階環路時本振相位輸出與外參考信號對比如圖5所示。可見晶振的老化使得其輸出相位與參考相比向一個方向不斷偏移;二階環路可以讓本振輸出相位跟隨外參考,但存在固定相差;當采用三階環路后,本振輸出相位跟隨外參考,且不存在固定相差。

圖5 開環、二階環路、三階環路本振相位輸出與外參考信號對比Fig.5 Local oscillator ouput compared with reference output when open loop,2order/3order pll loop
3 仿真分析
3.1 數字環路仿真分析
3.1.1鑒相器量化
鑒相器量化采用環路中用待馴服頻率源對其分頻后1PPS與參考輸入1PPS之間的時間差進行采樣的方式。不同量化靈敏度對于環路性能的影響如圖6所示。

圖6 量化靈敏度對于環路性能的影響曲線圖Fig.6 The effect on the pll performance by phase detector quantization
從圖6可以看出,鑒相器量化程度越高對提高環路性能越有利,將10MHz待馴服信號倍頻至1GHz對時間差進行采樣的環路性能要遠遠好于利用倍頻至50MHz信號進行采樣。然而在FPGA內部實現1GHz的信號處理是不現實的,必須在FPGA可實現情況下盡量提高時間差采樣率。同時,通過圖7可以看出,減小環路噪聲帶寬BL可以抵消鑒相靈敏度對環路輸出性能的影響。
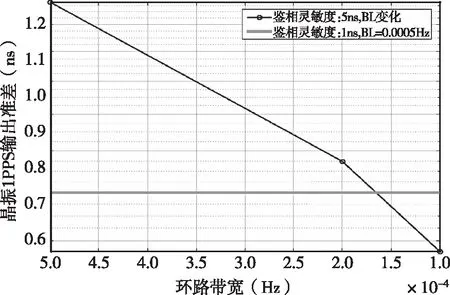
圖7 減小環路帶寬BL可以抵消鑒相靈敏度對環路輸出性能的影響Fig.7 The decrease of BL can compensate phase detector quantization decrease
3.1.2本振壓控壓DA器件量化
考慮晶振的數字控制對環路性能造成的影響。因為N位DA的量化誤差的方差為
若N位DA控制晶振的最大調整范圍為±5Hz,晶振標稱f0=10MHz,有f0·Δ·2N-1=5,則頻率控制步長為
DA的量化誤差方差為
DA量化位數對環路噪聲的影響如圖8所示。
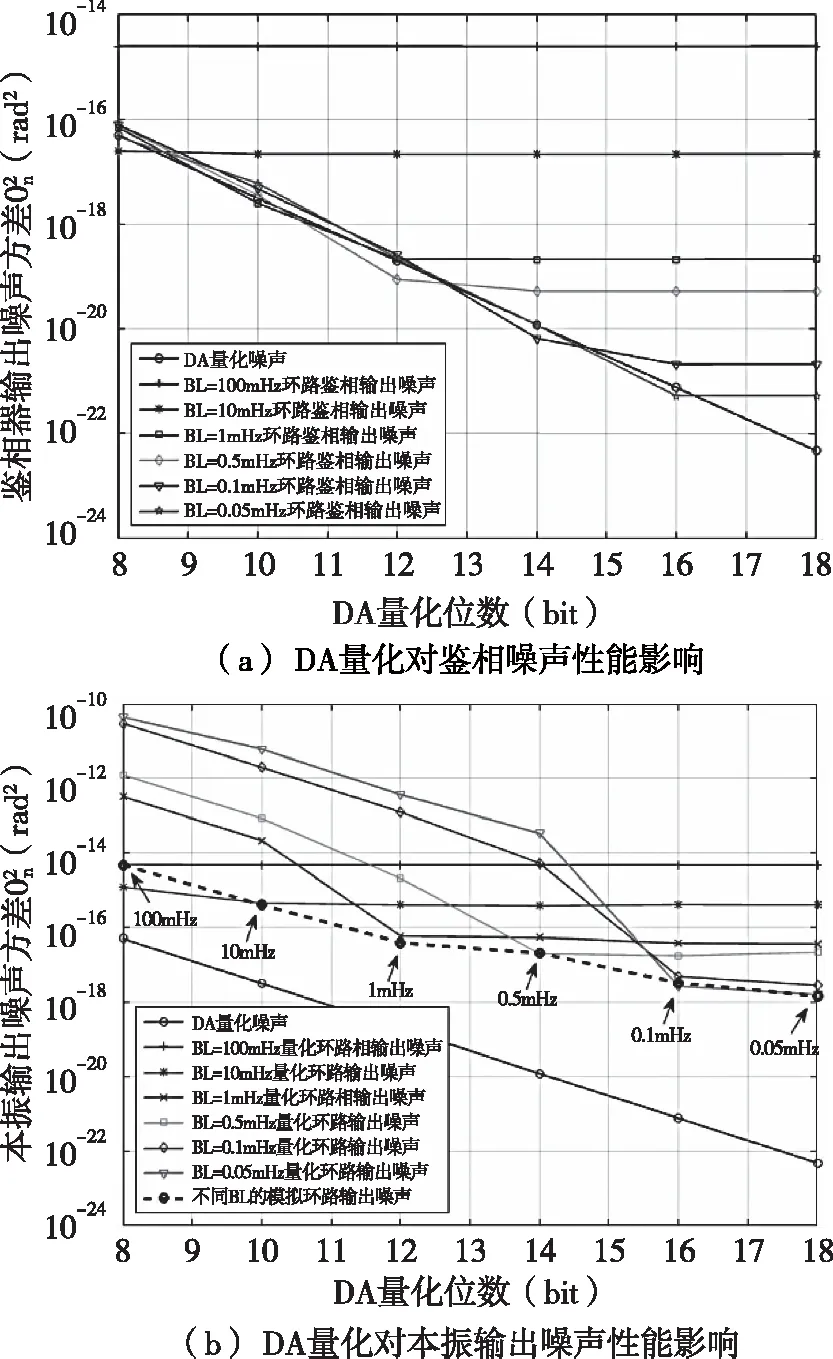
圖8 DA量化位數對環路噪聲的影響示意圖Fig.8 The influence of pll noise by DA quantization
可見,DA的量化位數限制了環路噪聲帶寬所能獲得的鑒相噪聲性能,進而決定了環路最小可設的有效帶寬BL。由于晶體老化的影響,在環路帶寬過低時,DA量化會造成相位輸出起伏,反而使環路噪聲性能嚴重惡化。本振存在老化時,不同帶寬下DA量化(16bit)與非DA時輸出噪聲方差(rad2)比值如圖9所示。

圖9 不同帶寬下DA量化(16bit)與非DA時輸出噪聲方差(rad2)比值示意圖Fig.9 The ratio of local oscillator noise variance between DA(16bit)and pure analog
從圖9可以看出,噪聲帶寬不易過小,否則DA量化噪聲會造成輸出噪聲性能惡化。
同時,DA位數也決定了輸出頻率的準確度[7]。若頻率輸出準確度要求優于1×10-11,按1×10-12設計,則對于控制電壓為(0~5)V,頻率變化范圍±3Hz的10MHz晶振來說,通過壓控壓分辨率求DA位數N,有
(8)
由式(8)可知,DA至少為20位。
3.1.3環路的定點運算
Matlab模型中各模塊內部運算與輸出均為實數表示,盡管考慮了量化,但由于模型內部模塊為浮點雙精度數表示,具有足夠精度,且積分器不設上限。因此,須考慮實際使用中FPGA內部的定點數表示對環路性能的影響[8]。
環路數據位寬64bit,積分器位寬96bit時,環路浮點運算與定點運算在環路輸出噪聲性能上的比較如圖10所示。可見,采用適當位寬后環路定點運算近似于浮點運算。

圖10 環路浮點運算與定點運算在環路輸出噪聲性能上的比較曲線圖Fig.10 The comparison on local oscillator output performance between floating point and fixed point arithmetic
3.1.4DA輸出對相位噪聲性能的影響
若待馴服對象為高穩晶振,則需考慮DA輸出更新頻率對環路性能的影響。當數字鎖相環路的更新周期與外參考1PPS時間基準信號一致時,鎖相環輸出相當于1Hz低頻信號,若直接控制DA產生的壓控壓,則高穩晶振相位噪聲將會出現1Hz低頻信號的各次諧波,使得偏移(0.1~10)Hz的相噪惡化,如圖11所示。

圖11 1Hz DA輸出頻率對相噪的影響曲線圖Fig.11 The influence on local oscillator output phase noise by 1Hz DA update frequency
因此,鎖相環輸出后必須接帶寬<1Hz的數字低通濾波器。數字濾波器主要考慮截至頻率fc、濾波器階數和采樣頻率fs。截至頻率越小越有利于抑制相位噪聲,但由于濾波器帶寬與產生的附加延遲成反比,過大的延遲反而可能使環路失鎖,仿真結果表明,Fc=0.001Hz的1階butterworth濾波器即可,而1,2,3階Fc=0.000 1濾波器環路都會產生振蕩,如圖12所示。

圖12 數字濾波器階數、截至頻率對相位噪聲影響曲線圖Fig.12 The influence on DPLL phase noise by digital filter order and cut frequency
數字濾波器的采樣率越高,它所產生的混疊頻率越高,越容易被簡單模擬濾波器濾除,但高采樣率意味著高計算量和高功耗,由圖13給出的仿真結果可以看出,從相位噪聲抑制角度看,100Hz的數字濾波器采樣率已經足夠。

圖13 數字濾波器采樣率對相位噪聲影響曲線圖Fig.13 The influence on DPLL phase noise by digital filter sample frequency
4 實測結果
頻標模塊組成框圖如圖14所示。

圖14 頻標模塊組成框圖Fig.14 The composition of frequency standard component
為了驗證數字鎖相環頻標方案的可行性,以晶振8607作為參考源對頻標模塊進行測試,結果數據見表1和表2,曲線結果如圖15所示。
由測試結果可知,環路帶寬BL=0.005Hz的環路性能只是略低于BLD=0.003Hz,但BL=0.005Hz環路鎖定時間在1h左右,而BL=0.003Hz環路則>3h,所以工程上取BL=0.005Hz即可滿足要求。測試均采用了二階環路結構,因為由仿真可知當BL<0.000 2Hz時,才會出現環路穩態相差Δφ≠0情況。設計中數字低通濾波器截至頻率為fc=0.01Hz。
還可看出,在同樣環路帶寬BL下,GPS/BD馴銣鐘,銣鐘馴晶振的頻標結構性能要明顯優于GPS/BD直接馴晶振的性能。但在指標可接受情況下,采用GPS/BD直接馴晶振的結構可以大大降低頻標模塊的成本。

表1 數字鎖相環頻標模塊相位噪聲測試結果(單位:dBc/Hz)Tab.1 Digital PLL frequency standard component phase noise test result(unit:dBc/Hz)相噪頻偏0.001Hz0.1Hz1Hz10Hz備注高穩晶振參數——<-113<-143—恒壓-37.9-81.1-112.3-136.8—BLD=0.007Hz-33.4-57.3-92.8-129.9—BLD=0.005Hz-34.7-77.8-112.5-136.8—BLD=0.005Hz-25.9-71.5-112.7-136.8GPS馴晶振BLD=0.003Hz-37.0-80.4-112.8-136.9—
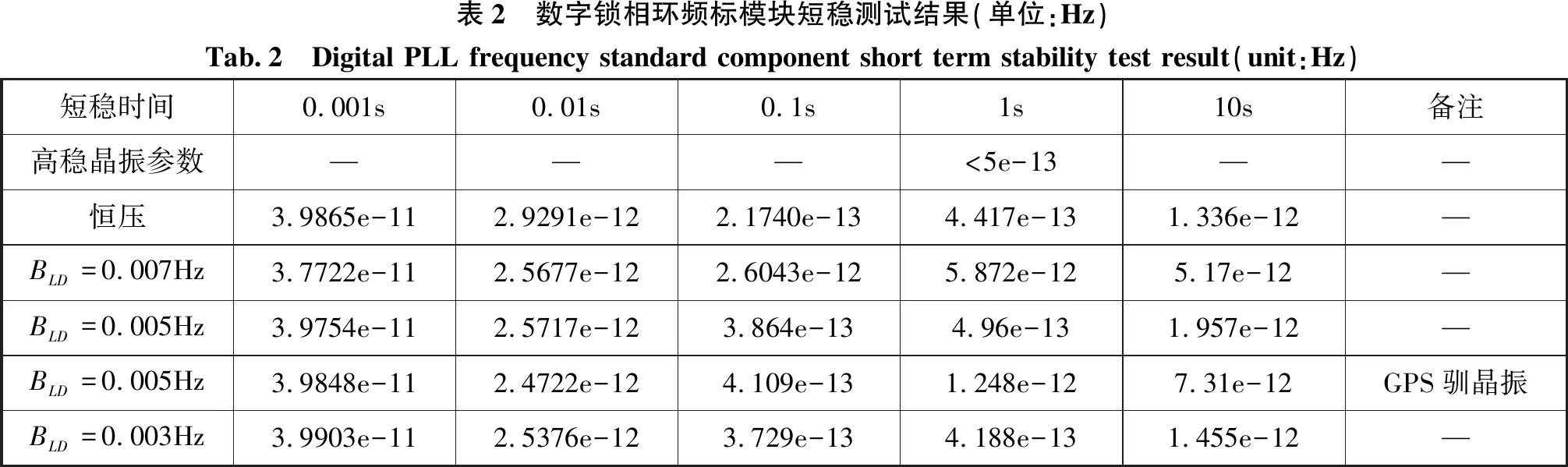
表2 數字鎖相環頻標模塊短穩測試結果(單位:Hz)Tab.2 Digital PLL frequency standard component short term stability test result(unit:Hz)短穩時間0.001s0.01s0.1s1s10s備注高穩晶振參數———<5e-13——恒壓3.9865e-112.9291e-122.1740e-134.417e-131.336e-12—BLD=0.007Hz3.7722e-112.5677e-122.6043e-125.872e-125.17e-12—BLD=0.005Hz3.9754e-112.5717e-123.864e-134.96e-131.957e-12—BLD=0.005Hz3.9848e-112.4722e-124.109e-131.248e-127.31e-12GPS馴晶振BLD=0.003Hz3.9903e-112.5376e-123.729e-134.188e-131.455e-12—

圖15 數字鎖相環頻標模塊實測結果示意圖Fig.15 Digital PLL frequency standard component test result
5 結束語
本文利用數字鎖相環技術完成了時頻系統中的頻標模塊設計。鎖相環鑒相為1PPS脈沖比相方式。環路設計包括本地頻率源模型、外部參考1PPS信號模型、二階/三階環路濾波器設計等。在硬件實現時需要考慮環路噪聲帶寬及各組成部分量化,浮點數、定點數表示對環路噪聲性能的影響。DA輸出應當考慮數字環路所特有的低頻信號諧波問題,而須外加帶寬<1Hz的低通濾波器。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
