明輪驅動蝦塘自主導航投餌船設計與可靠性試驗
2019-12-06 03:04:04胡慶松曹佳瑞陳雷雷
農業機械學報 2019年11期
胡慶松 曹佳瑞 鄭 波 陳雷雷 李 俊
(上海海洋大學工程學院, 上海 201306)
0 引言
我國蝦類養殖總產量達216萬t,其經濟價值高,在水產養殖中占有重要地位[1]。養魚投餌已實現機械化,但蝦塘養殖還是依賴人工撒料。隨著勞動力成本提高,人工投喂餌料已成為限制蝦類養殖產業發展的瓶頸問題。此外,人工餌料拋撒不均勻,蝦攝食的領地性特征導致其生長規格差別較大,且局部餌料過剩易形成水體環境污染[2-3]。蝦類養殖塘中存在的增氧機固定繩等障礙物浮于水面之上,嚴重影響船體行駛。螺旋槳驅動容易產生纏繞,故設計流線型船體并采用明輪驅動是可行的方案之一[4]。自主導航技術在農業領域獲得了很多應用[5-14],也陸續研發了一些自主投餌、割草等裝置[15-19],在導航、全塘投喂等方面獲得了突破,但在可靠性等方面還存在一些問題,因此尚未得到大規模推廣。
為解決這一問題,從滿足蝦類養殖需求出發,設計基于明輪驅動的蝦塘自主導航投餌船。從全封閉式船體、明輪驅動結構、餌料傳送機構、自動導航控制策略與算法等方面進行高可靠性設計,并將投餌船進行長周期測試,以期為投餌船的推廣應用奠定基礎。
1 結構與工作原理
1.1 總體結構
移動式蝦類養殖投餌船主要由雙體式船體、明輪推進器、螺旋輸送裝置、拋料裝置等部分構成,其總體結構如圖1所示。投餌船船體尺寸為1.8 m×1.1 m×1 m,船體采用PE材料滾塑成型,為全封閉結構,最大負載量60 kg,空載吃水深度為0.21 m,滿載吃水深度0.27 m。單體船穩定性較差,雙體船航行可控性更好,以雙體船作為裝置載體進行投餌平臺設計。其中,料倉位于船體上部,用來存放餌料;螺旋輸送裝置位于料倉下部,用來輸送餌料至拋料裝置;電源和板卡控制盒分別置于料倉側面和螺旋輸送裝置側面;拋料盤位于船體尾部船艙開口部位,用來拋撒餌料;明輪安裝在船體兩側,作為動力裝置。船體配備一個容量為12 V/60 A·h動力鋰電池供電,具有無污染、效率高等優點。
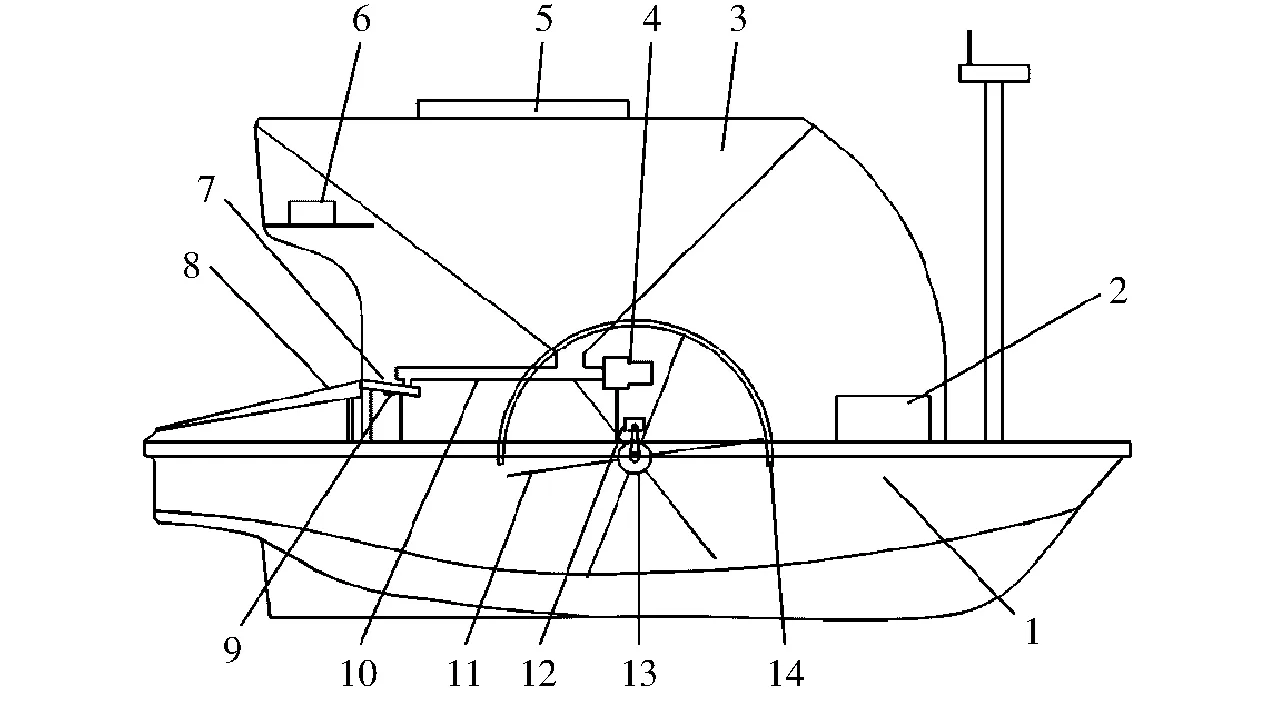
圖1 移動式蝦類養殖投餌船結構圖Fig.1 Overall structure diagram of mobile shrimp pond feeding device1.船體 2.板卡控制盒 3.料倉 4.螺旋輸送電機 5.倉蓋 6.鋰電池 7.拋料盤 8.下料板 9.拋料電機 10.螺旋輸送裝置 11.明輪 12.直流電機 13.減速裝置 14.防纏繞保護罩
1.2 工作原理
為了靈活應對多種環境的投餌需求,移動式蝦類養殖投餌船設有遙控和自主導航兩種控制方式,其系統結構框圖如圖2所示。

圖2 系統結構框圖Fig.2 Block diagram of system structure
主控制器采用ST公司基于Cortex-M4內核設計的低成本、高效率、功耗低的32位處理器STM32F407。自主導航模式中,主控制器獲取定位信息(GPS模塊)、姿態信息(電子羅盤)后使用開發的導航算法進行處理,根據處理的結果調用PWM(Pulse width modulation)驅動模塊(驅動明輪和餌料輸送裝置)和GPIO (General purpose input output)輸出模塊(控制拋料盤),控制船體的航行和投餌。433 MHz通信模塊與STM32F407通過串口進行通信,接收來自上位機的指令,并將船體位置、航向等信息上傳至上位機。電源模塊提供電壓有3.3、5、12 V。
GPS采用的是NEO-M8N模塊,它是一款高性能、高靈敏度的GPS導航定位模塊,RF架構和干擾抑制可以保證芯片在反GNSS環境下保持良好的性能。電子羅盤采用的是邁科傳感科技的SCM345型號產品,它是一款高精度三維電子羅盤,采用三維補償專利技術,當羅盤水平放置在船體上時,可在船體受風向、風力影響橫滾或俯仰傾斜為±40°的角度范圍內提供準確的航向數據,航向精度為1°,具有體積小、功耗低、高可靠性等特點,可以滿足要求。
1.3 主要結構特點
1.3.1明輪推進器
實際池塘養殖中,由于存在增氧機固定繩等障礙物,而空氣螺旋槳成本和維護要求較高,故采用成本低、低速機動性好、航控性較好、可順利跨過障礙物的明輪作為推進器[20]。明輪材料采用航空鋁,硬度高,抗氧化性好,結構為定蹼式6葉槳,并在旋轉與非旋轉部件間隙處設有不銹鋼防纏繞罩,如圖3所示。根據船體航行速度不小于0.6 m/s要求,船體采用12 V/60 W的GPG-07SC型有刷直流電動機,通過不需油脂潤滑的不銹鋼鏈傳動驅動明輪轉動,實現兩側明輪的轉速差控制船體前進、后退以及轉向。

圖3 明輪驅動投餌船Fig.3 Paddle-driven feeding boat
1.3.2螺旋輸送與拋料裝置
與固定式養魚用投餌機不同,若直接將投餌機料倉放置于船尾,隨著餌料的投放,投餌船重心會有很大的變化,導致船體驅動性能變化較大。為解決這一問題,將料倉置于船體重心位置,通過螺旋輸送方式將餌料輸送至尾部的拋料盤,拋料盤通過電動機的帶動,將餌料拋向池塘。為了保證1~3 kg/min下料量、低破碎率、拋料均勻性和寬度,采用直徑為70 mm、螺距為40 mm、長度為500 mm的螺旋軸,如圖4所示。采用折彎角度為12°的5葉槳拋料盤,其橫向斷面均勻性較好。螺旋輸送電動機采用12 V/60 W、額定轉速為1 800 r/min的GPG-07SC型有刷直流電動機;拋料電動機采用12 V/50 W、額定轉速為2 500 r/min的扁平電動機。
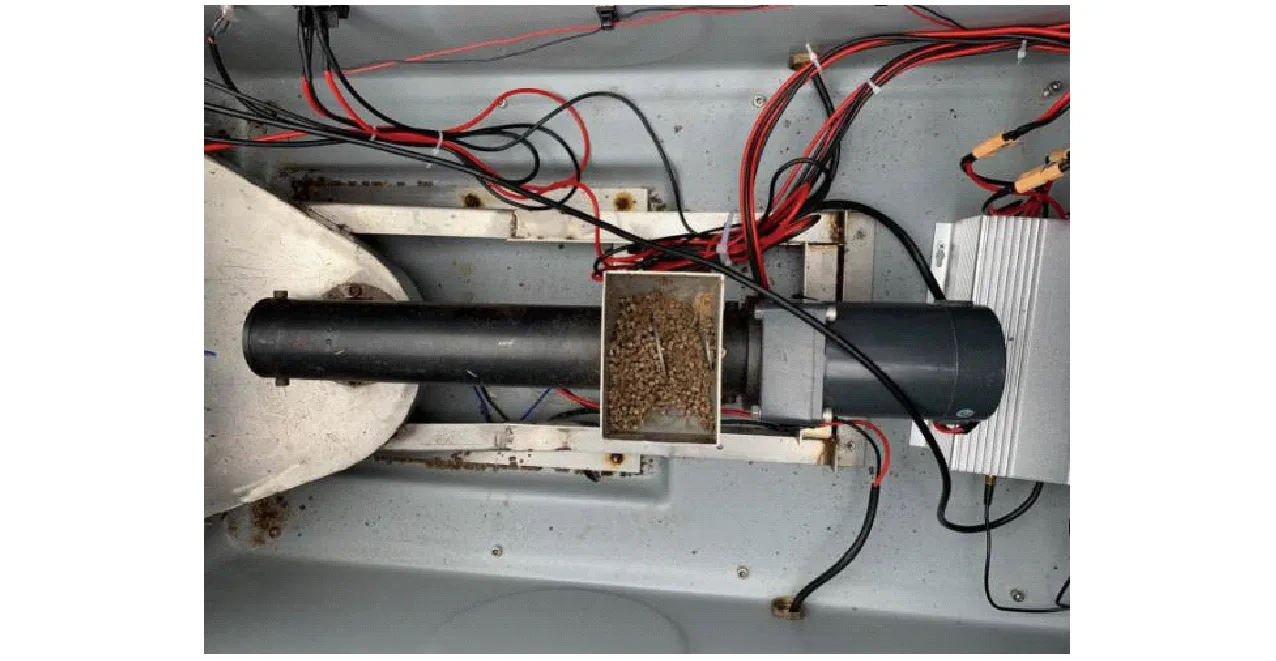
圖4 螺旋輸送裝置Fig.4 Screw conveyor
2 導航控制系統設計
2.1 運動模型構建
采用直線和原地轉彎相結合的運動方式,即直線運動到轉彎點時先減速到零,進行原地轉彎后再加速到巡航速度。該運動方式可以形成折線而非帶圓弧的巡航軌跡,在滿足投餌需求的前提下實現航速和航向更好的解耦,降低控制難度,提升抗干擾能力。直線和原地轉彎是投餌船工作中的兩個基本運動形式,對其進行建模是對投餌船進行控制的基礎。
2.1.1直線運動模型
單個明輪推力計算公式為[21]
Fe=CFSFρn2D2
(1)
其中
SF=2bh
(2)
式中Fe——單個明輪推力,N
CF——推進力系數
SF——明輪水力作用面積,m2
b——明輪寬度,m
h——明輪底部邊緣到吃水線的距離,m
ρ——水密度,kg/m3
n——明輪工作轉速,r/s
D——明輪直徑,m
推進力系數取3,明輪寬度為0.075 m,明輪底部邊緣到吃水線的距離滿載時為0.25 m,則明輪水力作用面積為0.037 5 m2,水的密度為1 000 kg/m3,明輪的工作轉速1 r/s,明輪直徑0.48 m,將以上數據代入公式(1),并通過計算,可得船體平衡狀態下的總推力為51.84 N。
船體直線航行時阻力計算公式為[22]
Fz=Czρv2S/2
(3)
式中Fz——船體直線航行時阻力,N
Cz——阻率
v——船體運行速度,m/s
S——船體吃水面積,m2
船體滿載運行平衡狀態時船體運行速度為0.72 m/s,船體吃水面積3.1 m2,根據船體受力平衡狀態方程得到阻率為0.06。
根據牛頓第二定律,加速和減速過程中船體動態過程可以描述為
(4)
式中m*——船載總質量,kg
由于明輪轉速變化量小,變化時間短,因此可把明輪推力看作滿載平衡時推力,即51.84 N。則式(4)表示為
(5)
(6)
所以在加速階段的速度為
v=0.75tanh(0.53t+0.53C0)
(7)
式中C0——常數t——時間,s
當時間為零,船體運行速度也為零時,代入式(7)可得C0為零,式(7)表示為
v=0.75tanh(0.53t)
(8)
當加速到0.72 m/s時,加速時間為3.67 s,實際測試時間為3.5 s。
同理,在減速階段,明輪反轉,所以式(4)變為
(9)
(10)
所以減速階段的速度為
v=0.74tan(-0.53t+C1)
(11)
式中C1——常數
當時間為0,船體運行速度為0.72 m/s時,代入式(11)可得C1為0.77,式(11)表示為
v=0.74tan(-0.53t+0.77)
(12)
當減速到速度為0時,減速時間為1.45 s,實際測試時間為1.5 s。
這里將驅動力作為常量進行計算,根據上述構建的模型進行了多組試驗,船體運行速度、加減速時間與模型計算結果誤差較小,說明所建模型具有較高的準確性。
2.1.2原地轉彎運動模型
明輪驅動船體原地轉彎時,轉矩計算公式為
T=2FeL/2
(13)
式中L——船體寬度,m
T——轉矩,N·m
原地轉彎時,船體受到的阻力矩計算公式為
Tz=λωz
(14)
式中ωz——船體轉動瞬時角速度,rad/s
λ——阻尼系數
Tz——阻力矩,N·m
當船體原地轉彎處于平衡狀態時,船體寬為1.1 m,根據公式(13)得轉矩為28.51 N·m,船體轉動瞬時角速度為0.628 rad/s,根據力矩平衡方程,得到阻力系數為45.4。
由力矩平衡方程知
(15)
式中J——船體轉動慣量,kg·m2
由于原地轉彎時明輪轉速變化量小,變化時間短,可把動力矩看作滿載平衡時力矩,即28.51 N·m。根據表1數據,由SolidWorks建模分析得原地轉彎時轉動慣量為26.9 kg·m2,則式(15)表示為

(16)

(17)
所以在非勻速階段的角速度為
ωz=C2e-1.69t+0.63
(18)
式中C2——常數
當時間為0,角速度也為0時,代入式(18)可得C2為-0.63,式(18)表示為
ωz=-0.63e-1.69t+0.63
(19)
當角速度加速到0.628 rad/s時,加速時間為3.41 s,實際測試時間為3.5 s。這里將動力矩作為常量是一種近似計算,根據上述構建的模型進行了多組試驗,船體原地轉彎角速度、轉彎時間等與計算結果誤差較小,說明所建模型具有較高的準確性。
2.2 自動導航路徑規劃與實現
本系統使用基于RTK (Real time kinematic)模式的高精度GPS系統采集池塘四角坐標,進一步根據投喂路徑計算和設定航道關鍵點(出發點、插入點、轉彎點)處的位置坐標,插入點根據直線運動的長度進行確定。將關鍵點坐標下載至投餌船控制系統,控制系統根據出發點和插入點及轉彎點之間的位置信息進行相應的直行和轉彎動作。

圖5 直行和轉彎示意圖Fig.5 Straight and turn diagram
如圖5所示,1、2、3、4、5、6為6個關鍵點,點0為船體當前位置,點1為起點,航道方向為1→2→3→4→5→6。點0首先按1→2行走,主控制器不斷計算船體和前方點2的距離向點2運行,當點0與點2之間距離大于2 m時,船體按航道正常航行,當點0與點2之間距離小于2 m時,主控制器認為船體已接近位置點2,將下一個關鍵點3作為新的巡航目標點,根據點2與點3的位置信息,進行巡航。當點0與點3之間距離大于2 m,船體按航道正常航行,當點0與點3之間距離小于2 m時,主控制器認為船體已接近位置點3,將下一個關鍵點4作為新的巡航目標點,根據點3與點4的位置信息,進行巡航。當點0與點4之間距離大于2 m,船體按航道正常航行,當點0與點4之間距離小于2 m時,主控制器認為船體已接近位置點4,將下一個關鍵點5作為新的巡航目標點,根據點4與點5的位置信息,主控制器判斷此處需先停止,正常投料,再進行原地轉彎,然后向點5直線巡航。當點0與點5之間距離大于2 m,船體按航道正常航行,當點0與點5之間距離小于2 m時,主控制器認為船體已接近位置點5,根據點5與點6的位置信息進行直線巡航,最后當點0與點6之間距離小于2 m時,船體減速運行到目標點6。
2.3 航向、航速控制算法
投餌船工作于池塘,其面積較小,環境較為單一,受到的干擾主要是快速變化的風力和水流阻力。船體本身運動速度低,特別是本文中投餌船主要是直行和原地轉彎兩個相對獨立的動作,目標是進行折線而非曲線運動,該控制目標下的航速、航向控制具有較好的解耦效果,所以把船體的航行控制分為航向控制和航速控制兩部分,控制系統框圖如圖6所示[23-25]。①主控制器通過定位模塊獲取投餌船實際船速v2和實時的經緯度坐標,并結合預設目標點經緯度坐標計算目標航向φ1。②利用電子羅盤解析出當前航向φ2。③把目標航向與當前航向的差值Δφ作為PD控制器的輸入量,輸出量為φ*,把目標航速與實際航速的差值Δv作為PI控制器的輸入量,輸出量為v*。最后,主控制器根據φ*和v*解耦結果進行投餌船的自動導航控制。航速控制采用PI控制,通過積分環節消除航速的穩態誤差。航向控制采用PD控制,通過微分環節減小航向角超調量、保持船體穩定。
控制系統把速度調整量v*(k)作為基準,將左右明輪速度分別加上和減去φ*(k)/2來進行解耦,得到左右明輪的速度分別為V1(k)和V2(k)。控制器根據V1(k)及V2(k)的值設定PWM模塊的占空比,控制船體左右明輪轉速。

圖6 組合導航控制框圖Fig.6 Combined navigation control block diagram
3 試驗與可靠性分析
3.1 現場試驗
將投餌裝置制造和安裝后進行系統調試及樣機的性能試驗,主要對投餌裝置進行自主導航系統測試和投餌能力測試。2019年4月28日在上海市崇明區崇東水產養殖合作社池塘進行投餌試驗,天氣為多云,風力1~2級,溫度15~19℃。分別在兩種不同水域情況的養殖塘進行現場路徑規劃測試,1號養殖塘,不規則四邊形水域,最長邊約180 m,最短邊約150 m,水深約為1 m,面積約為29 000 m2,池塘中間有一排布線樁,四周有增氧機,靠近岸邊的地方有電線桿,路徑規劃時,需規避;2號養殖塘,不規則四邊形水域,最長邊約280 m,最短邊約130 m,水深約1 m,面積約40 000 m2,池塘4個角落均有增氧機,路徑規劃時,需規避。
首先,在1號養殖塘進行現場投餌試驗,采用凹形路徑規劃,進行自主導航試驗。選取15個合適目標點,經緯度坐標如表2所示,1號點設在碼頭邊,方便裝料及維護,試驗如圖7所示。
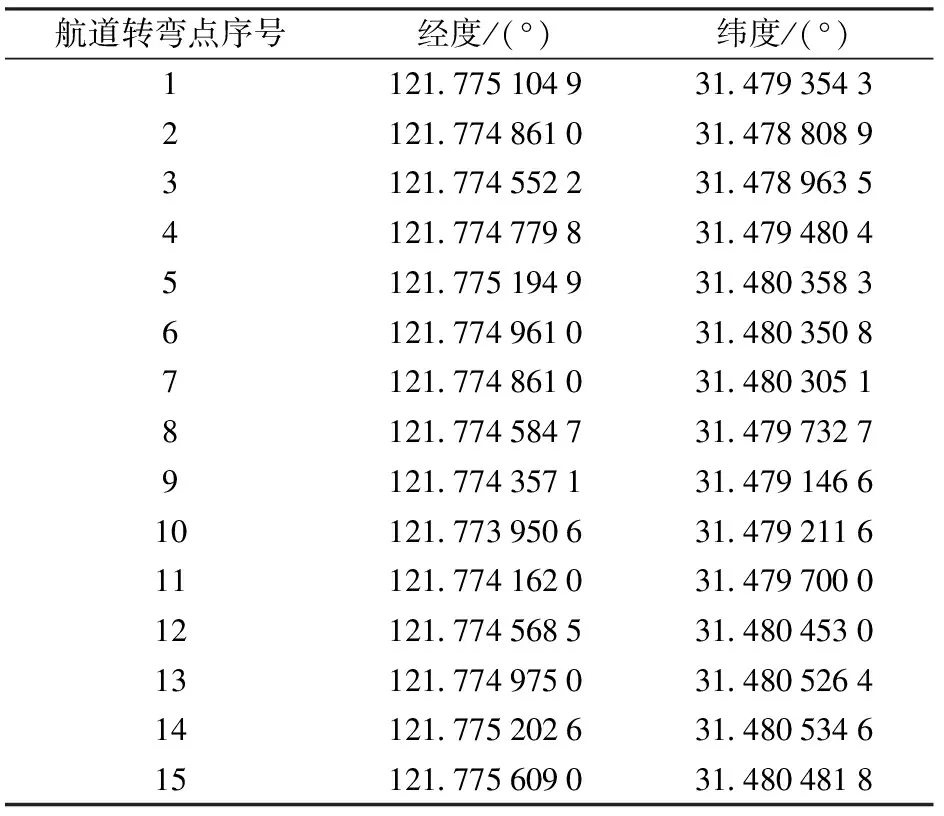
表2 1號塘位置坐標Tab.2 Position coordinates of No.1 pond

圖7 1號養殖塘試驗Fig.7 Breeding test in No.1 pond
航道方向為從1到15順序航行,最后回到起點。根據上位機接收的船體位置信息繪制投餌船航行軌跡如圖8所示,自主導航試驗測試數據分析如表3所示。由圖表可知,自主導航系統航行效果較好,能按預設軌跡投餌,導航偏航量不超過0.8 m。由于所采用導航模塊本身定位誤差在0.8 m左右,兩者疊加總誤差不超過1.6 m,滿足蝦塘投餌定位精度需求。
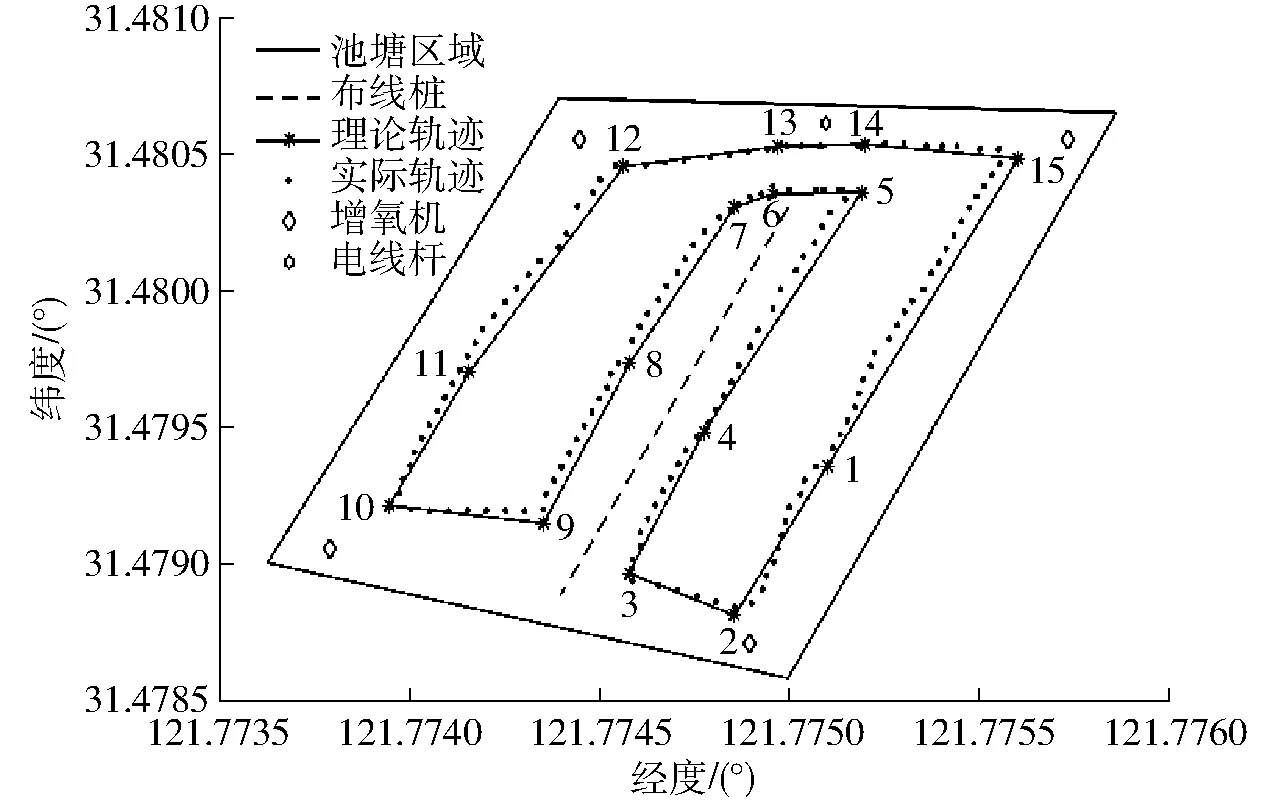
圖8 1號塘自主導航測試經緯度軌跡Fig.8 Autonomous navigation test latitude and longitude trajectory of No.1 pond

參數平均速度/(m·s-1)直行最大誤差/m直行平均誤差/m轉彎最大誤差/m轉彎平均誤差/m數值0.720.80.50.50.4
然后,在2號養殖塘進行系統投餌測試,試驗如圖9所示,采用往返式路徑規劃,如圖10,分為5個航道進行滿載投餌試驗。選取16個航道目標點,1號點設在碼頭邊,經緯度坐標如表4所示。

圖9 2號養殖塘試驗Fig.9 Breeding test in No.2 pond
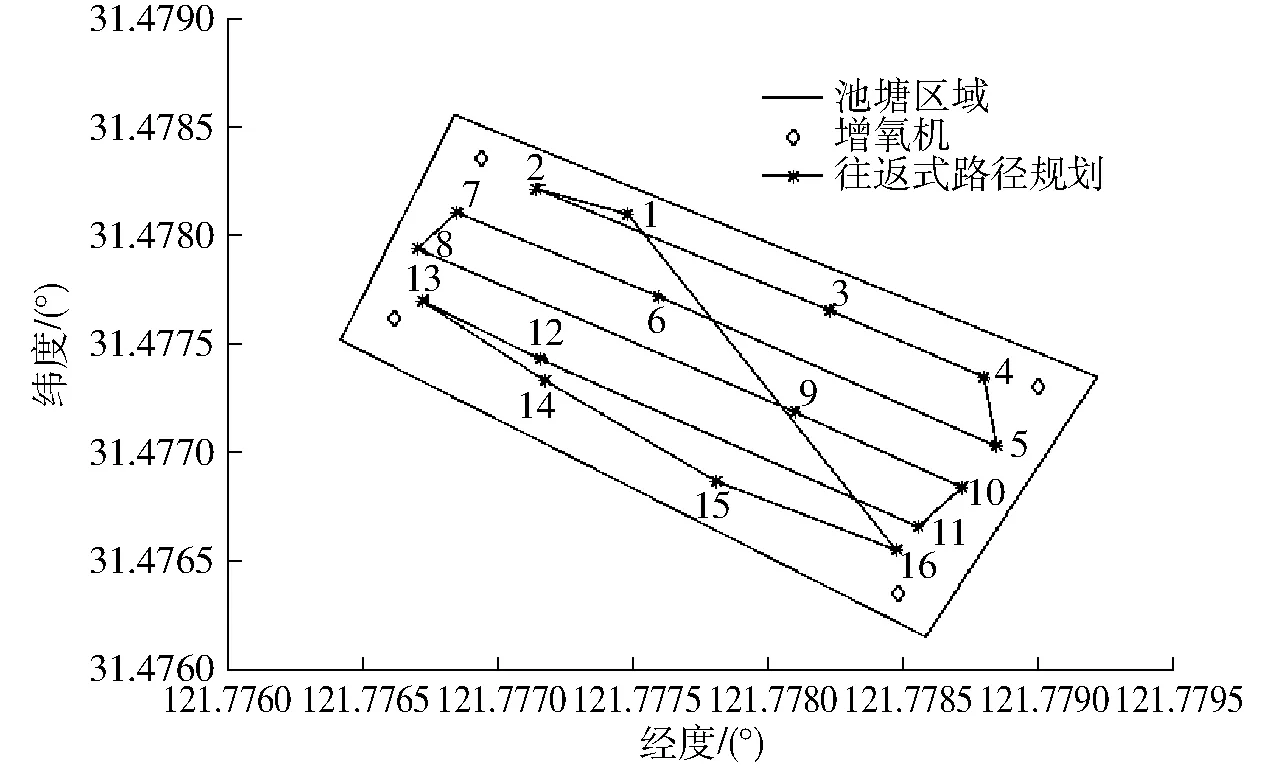
圖10 2號塘往返式路徑規劃Fig.10 Round-trip path planning of No.2 pond
投餌船從1到16順序航行,最后回到起點。進行3次投餌試驗,船體運行穩定,拋料盤拋撒寬度10 m左右,拋料均勻,能夠按照預設路徑巡航投餌,現場試驗數據如表5所示。由數據可知,單臺投餌裝置投餌時長在32 min左右,平均投餌1.3 kg/min,能夠覆蓋整個養殖池塘。投餌船投餌速率有機械和
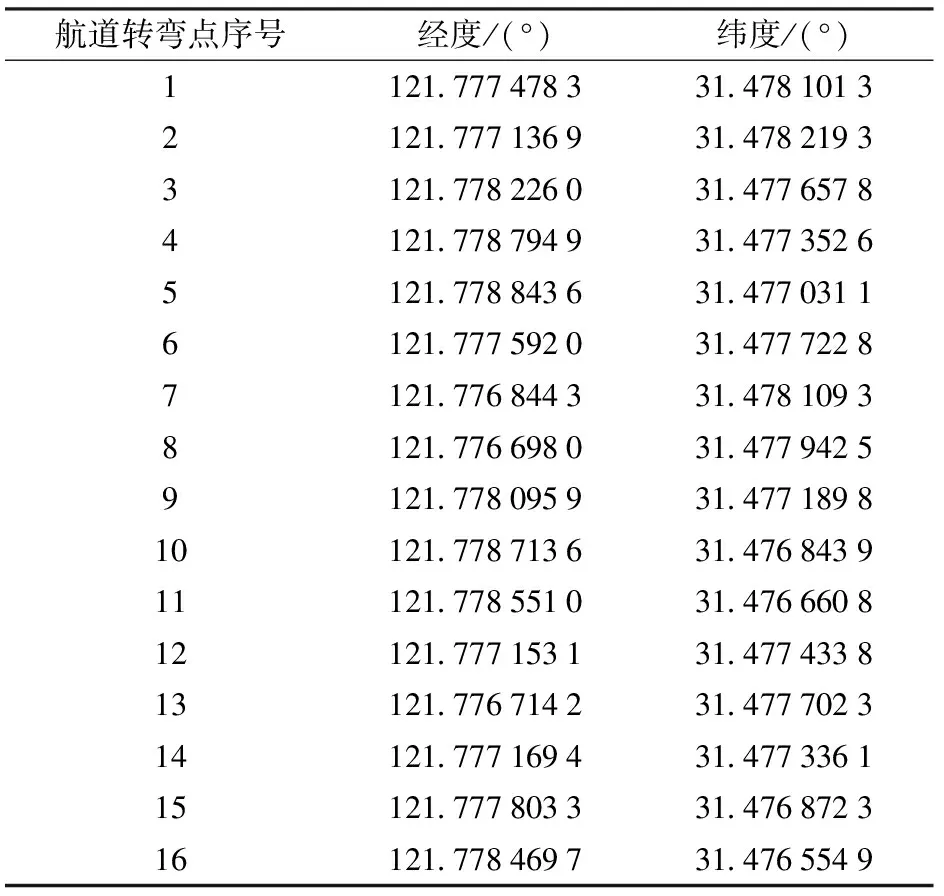
表4 2號塘位置坐標Tab.4 Position coordinates of No.2 pond
電氣兩種調整方式,可以滿足隨著養殖對象生長帶來的不同投餌速率的使用要求。

表5 2號塘自主導航投餌試驗數據Tab.5 Autonomous navigation feeding test data in No.2 pond
3.2 可靠性測試
為檢驗投餌船的可靠性,特別把使用人員因素一并納入考慮,在由技術人員完成現場測試后進行可靠性測試。本次試驗由一線養殖人員獨立實施,即在調試完成并對一線養殖人員進行培訓后完全由其自行操作,2019年5月19日正式開始。在40 d測試中,投餌船總體使用正常,無機械損壞。60 A·h電池剩余40%電量的情況下可以連續工作2.8 h,實際應用中2 d充電一次,每次工作30 min左右,40 d中未發現續航力問題。在測試期間經歷了大風、大雨、操作失誤等,具體如下:
(1)大風環境下的可靠性
5月25日,東南風5~6級,導航系統正常工作,導航精度有所偏大但不影響投喂。解決辦法:在5~6級大風下可以正常工作,但在更大風力情況下應該不能正常使用,待后期進行測試。
(2)潮濕餌料導致積料
6月12日,養殖人員將微生物制劑溶液倒入餌料中,導致餌料粘結,螺旋輸送部位積料。解決辦法:目前投餌機采用了50 cm的螺旋輸送到拋料盤,以解決投喂過程中船體重心變化過大問題,暫時不能用于投放濕料,后期根據現場需求進行新的整體抖動式投餌裝置開發。
(3)操作失誤下的可靠性
6月16日,拋料盤在未啟動的情況下,操作人員開啟螺旋輸送電機進行工作,導致餌料在拋料口堆積。解決辦法:將控制算法進行修改,把拋料盤電機工作作為螺旋輸送電機工作的先決條件,避免了在拋料口積料。
(4)大雨環境下的可靠性
6月17日,大雨,料倉內少量進水,原因為扇形拋料口朝上10°設計,拋料口為點焊而成,焊縫處有一定滲水;解決辦法為:在投餌船停泊時頭部略微上翹,避免進水,后期加工中進行全焊,避免滲水。
4 結論
(1)設計了基于明輪驅動的移動式蝦塘自主投餌船,能夠適應現場工作環境,易于維護,加長螺旋輸送機構投餌機能夠將處于船體重心位置的料倉餌料送至拋料盤,前期試驗和現場測試中未發現機械損壞現象,具有較高的成熟度。
(2)對投餌船進行了直線和原地轉彎運動建模,自主導航系統控制策略較為合理,自主導航時,平均速度0.72 m/s,最大直線偏航量為0.8 m,最大轉彎偏航量為0.5 m,性能比較穩定,能夠通過折線運動方式解決池塘中存在增氧機、電線桿等障礙物的巡航軌跡設計問題,特別是在大風環境下的正常使用顯示了控制系統較強的環境適應性。
(3)40 d測試結果表明,所研發的投餌船具有較高的可靠性,滿足現場應用要求。
