基于疊加柔性鉸鏈的超磁致伸縮驅(qū)動(dòng)器建模與實(shí)驗(yàn)
2019-12-06 03:04:58周景濤何忠波劉國平
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2019年11期
周景濤 何忠波 柏 果 劉國平
(陸軍工程大學(xué)石家莊校區(qū)車輛與電氣工程系, 石家莊 050003)
0 引言
超磁致伸縮材料(Giant magnetostrictive material, GMM)具有輸出功率大、能量密度高、響應(yīng)快和滯環(huán)低等優(yōu)點(diǎn)[1-2],逐漸成為當(dāng)前研究的熱點(diǎn)之一。以GMM為核心的致動(dòng)器[3]輸出位移誤差在40 nm以內(nèi),能實(shí)現(xiàn)很高的進(jìn)給精度。采用GMM驅(qū)動(dòng)技術(shù)的高精度定位裝置[4],定位精度能夠達(dá)到±30nm。以GMM為執(zhí)行元件的主動(dòng)減振降噪系統(tǒng)[5]具有頻帶寬、低頻特性好的特點(diǎn),最大減振量可達(dá)70%。另外,GMM還廣泛應(yīng)用于開關(guān)閥[6]、流量控制閥[7]、高精度傳感器[8]和能量收集裝置[9]等,實(shí)現(xiàn)了良好的控制精度和反應(yīng)速度。GMM的磁致伸縮系數(shù)較小(1×10-3),其輸出位移小的缺點(diǎn)使其在工程技術(shù)方面的應(yīng)用受到了一定限制。通過一些液壓放大機(jī)構(gòu)或機(jī)械放大機(jī)構(gòu)可以在一定程度上放大輸出位移[10-12],但同時(shí)也成比例地縮小了輸出力,降低了系統(tǒng)靈敏度。利用慣性沖擊原理研制的慣性-摩擦式驅(qū)動(dòng)器[13-14]可以實(shí)現(xiàn)大行程進(jìn)給和精密定位,但輸出力較小。
柔性鉸鏈?zhǔn)且揽勘旧硇巫儊韨鬏斶\(yùn)動(dòng)或力的運(yùn)動(dòng)副,具有無摩擦、無間隙、運(yùn)動(dòng)靈敏度高、導(dǎo)向精度高等諸多特點(diǎn)[15],廣泛應(yīng)用在精密機(jī)械和儀器等領(lǐng)域。有學(xué)者對柔性鉸鏈的力學(xué)特性進(jìn)行了研究[16-17],并通過有限元法[18]進(jìn)行了預(yù)測分析;有些研究利用積分法[19]或奇異函數(shù)法[20]得到了在目標(biāo)方向上的等效剛度,CHOI等[21]利用剛度矩陣法對機(jī)構(gòu)進(jìn)行了動(dòng)力學(xué)建模,LOBONTIU等[22]推導(dǎo)了用柔度表示柔性鉸鏈的彈性運(yùn)動(dòng)方程,宗光華等[23]利用彎曲變形理論建立了柔性鉸鏈平行四桿機(jī)構(gòu)屈曲臨界力的數(shù)學(xué)模型,MA等[24]通過雙梁約束模型得到了非線性特性的解析表達(dá)式。
本文設(shè)計(jì)一種基于尺蠖運(yùn)動(dòng)方式的高精度、大行程的超磁致伸縮直線驅(qū)動(dòng)器,對疊加式柔性鉸鏈進(jìn)行受力分析、強(qiáng)度校核和模態(tài)分析,建立輸出位移模型,并對樣機(jī)進(jìn)行實(shí)驗(yàn)測試。
1 工作原理
超磁致伸縮直線驅(qū)動(dòng)器仿生“尺蠖”運(yùn)動(dòng)形式,主要由驅(qū)動(dòng)機(jī)構(gòu)、前箝位機(jī)構(gòu)、后箝位機(jī)構(gòu)和導(dǎo)軌組成,其工作原理如圖1所示,通過以下步驟完成一次步進(jìn)運(yùn)動(dòng):
(1)后固定:后箝位機(jī)構(gòu)伸長,固定在導(dǎo)軌上。
(2)前解脫:前箝位機(jī)構(gòu)收縮,與導(dǎo)軌解脫。
(3)驅(qū)動(dòng):驅(qū)動(dòng)機(jī)構(gòu)伸長,推動(dòng)前箝位機(jī)構(gòu)向前移動(dòng)。
(4)前固定:前箝位機(jī)構(gòu)伸長,固定在導(dǎo)軌上。
(5)后解脫:后箝位機(jī)構(gòu)收縮,與導(dǎo)軌解脫。
(6)復(fù)位:驅(qū)動(dòng)機(jī)構(gòu)收縮,拉動(dòng)后鉗緊機(jī)構(gòu)向前移動(dòng)。

圖1 直線驅(qū)動(dòng)器的工作原理Fig.1 Working principle of linear actuator1.前箝位機(jī)構(gòu) 2.驅(qū)動(dòng)機(jī)構(gòu) 3.后箝位機(jī)構(gòu) 4.導(dǎo)軌
以上6個(gè)步驟為一個(gè)工作周期,系統(tǒng)完成一次“推-拉”動(dòng)作,輸出單步位移Δx。系統(tǒng)不斷循環(huán),可實(shí)現(xiàn)位移的“尺蠖式”步進(jìn)輸出。理論上,如果導(dǎo)軌足夠長,可實(shí)現(xiàn)無窮大的位移輸出。
2 機(jī)構(gòu)設(shè)計(jì)
2.1 結(jié)構(gòu)設(shè)計(jì)
直線型驅(qū)動(dòng)器主要由驅(qū)動(dòng)機(jī)構(gòu)、前箝位機(jī)構(gòu)、后箝位機(jī)構(gòu)、動(dòng)子和導(dǎo)軌組成,如圖2所示。驅(qū)動(dòng)機(jī)構(gòu)、前后箝位機(jī)構(gòu)分別安裝在動(dòng)子的中間和兩端,其結(jié)構(gòu)基本相同,主要由GMM棒、軛鐵、楔形塊、線圈和螺釘組成。動(dòng)子的多層薄板狀結(jié)構(gòu)形成疊加式柔性鉸鏈,線圈通電時(shí),GMM棒伸長,柔性鉸鏈產(chǎn)生形變并儲(chǔ)存能量,線圈掉電時(shí),GMM棒收縮,在柔性鉸鏈的彈性作用下,機(jī)構(gòu)回位。轉(zhuǎn)動(dòng)螺釘,通過楔形塊A推動(dòng)楔形塊B產(chǎn)生垂直方向的位移,可以為GMM棒提供較大的預(yù)緊力,并能夠較準(zhǔn)確地控制預(yù)緊力的大小。

圖2 結(jié)構(gòu)組成Fig.2 Structure of actuator1.前箝位機(jī)構(gòu) 2.驅(qū)動(dòng)機(jī)構(gòu) 3.動(dòng)子 4.后箝位機(jī)構(gòu) 5.螺釘 6.導(dǎo)軌 7.楔形塊B 8.楔形塊A 9.線圈 10.GMM棒 11.軛鐵
2.2 疊加式柔性鉸鏈設(shè)計(jì)
動(dòng)子的彈性元件采用疊加式柔性鉸鏈,與傳統(tǒng)的單個(gè)柔性鉸鏈相比,疊加式柔性鉸鏈將形變分配到各個(gè)柔性鉸鏈,大大地降低了柔性鉸鏈的應(yīng)力。采用的柔性鉸鏈厚度為0.8 mm,若采用單個(gè)柔性鉸鏈,剛度相同時(shí)其厚度減少為0.34 mm。對兩種結(jié)構(gòu)進(jìn)行有限元分析(GMM棒輸出位移為0.02 mm),其應(yīng)力分布圖如圖3所示,單個(gè)柔性鉸鏈的應(yīng)力主要集中在柔性鉸鏈的兩端,最大應(yīng)力為149 MPa,疊加式柔性鉸鏈應(yīng)力分布在各個(gè)柔性鉸鏈,最大應(yīng)力僅為16 MPa,疊加式柔性鉸鏈的應(yīng)力遠(yuǎn)遠(yuǎn)優(yōu)于單個(gè)柔性鉸鏈,有利于提高使用壽命。
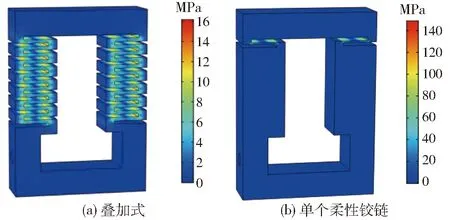
圖3 疊加式和單個(gè)柔性鉸鏈的壓力分布Fig.3 Pressure distributions of superimposed and single flexure hinge
GMM棒輸出位移時(shí)需克服柔性鉸鏈的彈力,所以柔性鉸鏈的剛度KR不能大于GMM棒的等效剛度KG,GMM棒的等效剛度KG為
(1)
式中FG——GMM棒輸出力r——半徑
S——輸出位移lG——長度
λS——飽和磁致伸縮系數(shù)σ——應(yīng)力
計(jì)算得驅(qū)動(dòng)GMM棒等效剛度KG1=1.06×107N/m,箝位GMM棒等效剛度KG2=1.41×107N/m。
疊加式柔性鉸鏈中各個(gè)柔性鉸鏈的受力基本相同,受力分析如圖4所示,柔性鉸鏈的兩端較厚部位假設(shè)成剛性,柔性鉸鏈的A端固定,B端為自由端,C端受力F作用產(chǎn)生豎直位移,同時(shí)B端向左產(chǎn)生位移,此時(shí),柔性鉸鏈中點(diǎn)的彎矩為零,可將柔性鉸鏈簡化成在中點(diǎn)處銷接的兩個(gè)懸臂梁,銷接處只受拉應(yīng)力,由受力平衡得F1=F,由懸臂梁撓度公式得
(2)

圖4 柔性鉸鏈?zhǔn)芰Ψ治鯢ig.4 Force analysis of flexible hinges
單個(gè)柔性鉸鏈的剛度K為
(3)
式中wA——驅(qū)動(dòng)柔性鉸鏈的撓度
l——驅(qū)動(dòng)柔性鉸鏈長度
E——驅(qū)動(dòng)柔性鉸鏈彈性模量
IF——驅(qū)動(dòng)柔性鉸鏈截面慣矩
綜合考慮強(qiáng)度、加工、壽命和尺寸等影響,單個(gè)柔性鉸鏈尺寸為10 mm×6 mm×0.8 mm,驅(qū)動(dòng)機(jī)構(gòu)設(shè)置13對柔性鉸鏈,箝位機(jī)構(gòu)設(shè)置5對柔性鉸鏈。通過計(jì)算得驅(qū)動(dòng)柔性鉸鏈剛度KR1=7.29×105N/m,小于KG1;箝位柔性鉸鏈剛度KR2=1.89×106N/m,小于KG2,均滿足設(shè)計(jì)要求。
2.3 預(yù)緊力和箝位設(shè)計(jì)
為發(fā)揮GMM棒的最佳輸出性能,需要對GMM棒施加一定的預(yù)緊力,施加預(yù)緊力后,箝位機(jī)構(gòu)和導(dǎo)軌的相對位置有3種情況,如圖5所示,情況1是箝位機(jī)構(gòu)和導(dǎo)軌有一定間隙,箝位機(jī)構(gòu)箝緊時(shí),需要克服箝位柔性鉸鏈一定的彈性變形,箝緊力變小,這會(huì)降低驅(qū)動(dòng)器的負(fù)載能力。情況2箝位機(jī)構(gòu)和導(dǎo)軌接觸并產(chǎn)生壓力P,這種情況箝位機(jī)構(gòu)移動(dòng)時(shí)會(huì)產(chǎn)生摩擦力,也會(huì)降低系統(tǒng)的負(fù)載能力。情況3箝位機(jī)構(gòu)和導(dǎo)軌剛好接觸且不產(chǎn)生壓力,即能最大程度地提供箝位力,又不影響系統(tǒng)的負(fù)載能力。由預(yù)緊力和柔性鉸鏈剛度KR可確定箝位機(jī)構(gòu)和導(dǎo)軌尺寸。

圖5 箝位機(jī)構(gòu)和導(dǎo)軌的位置關(guān)系Fig.5 Position relationship between clamping mechanism and guide rail
3 有限元分析
3.1 強(qiáng)度校核
為使柔性鉸鏈有較好的彈性性能,材料選擇65Mn彈簧鋼。系統(tǒng)工作時(shí),GMM棒來回伸縮,柔性鉸鏈產(chǎn)生彎曲形變,應(yīng)力集中在柔性鉸鏈部位。對動(dòng)子進(jìn)行有限元分析,其應(yīng)力分布如圖6所示。從圖6可看出,應(yīng)力主要集中在柔性鉸鏈的兩端,最大應(yīng)力為87 MPa,小于65Mn彈簧鋼的極限強(qiáng)度785 MPa。對柔性鉸鏈的疲勞強(qiáng)度進(jìn)行仿真校核,在最高頻率和最大受力的條件下,柔性鉸鏈的疲勞壽命為1.17×1027次,可以看成具有永久壽命。

圖6 動(dòng)子的強(qiáng)度校核Fig.6 Strength checking of mover

圖7 動(dòng)子模態(tài)分析Fig.7 Modal analysis of mover
3.2 模態(tài)分析
動(dòng)子采用線切割一體化加工而成,驅(qū)動(dòng)器工作時(shí),驅(qū)動(dòng)機(jī)構(gòu)和箝位機(jī)構(gòu)交替伸縮振動(dòng),為避免產(chǎn)生共振現(xiàn)象,需要對動(dòng)子進(jìn)行模態(tài)分析來確定其諧振頻率。通過模態(tài)分析得前4階模態(tài)振型如圖7所示,前4階諧振頻率分別為388、948、1 072、1 374 Hz。通過實(shí)驗(yàn)確定驅(qū)動(dòng)器的最大工作頻率為150 Hz,未達(dá)到共振頻率。
4 位移模型
為了簡化復(fù)雜信號(hào)的分析,根據(jù)電路疊加原理,將單個(gè)正方波信號(hào)u(t)簡化為2個(gè)幅值為U0的正負(fù)階躍信號(hào)U(t)的疊加,如圖8所示。
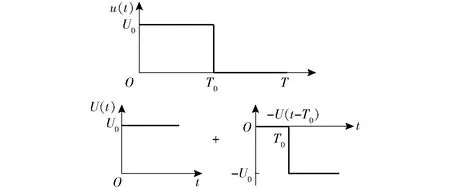
圖8 正方波脈沖信號(hào)的簡化疊加Fig.8 Simplified superposition of square wave pulse signals
U(t)表達(dá)式為
(4)
單個(gè)正方波脈沖函數(shù)u(t)可表示為
u(t)=U(t)-U(t-T0)
(5)
將線圈等效為電阻R和電感L的串聯(lián),如圖9所示。開關(guān)閉合前的電流為零,即iL1(0-)=0,開關(guān)閉合的瞬間,由于電感L中的電流不能產(chǎn)生躍變,所以iL1(0+)=iL1(0-)=0,在電壓U0的作用下,電感中的電流iL1逐漸增大,直至達(dá)到穩(wěn)定狀態(tài)iL1=U0/R。
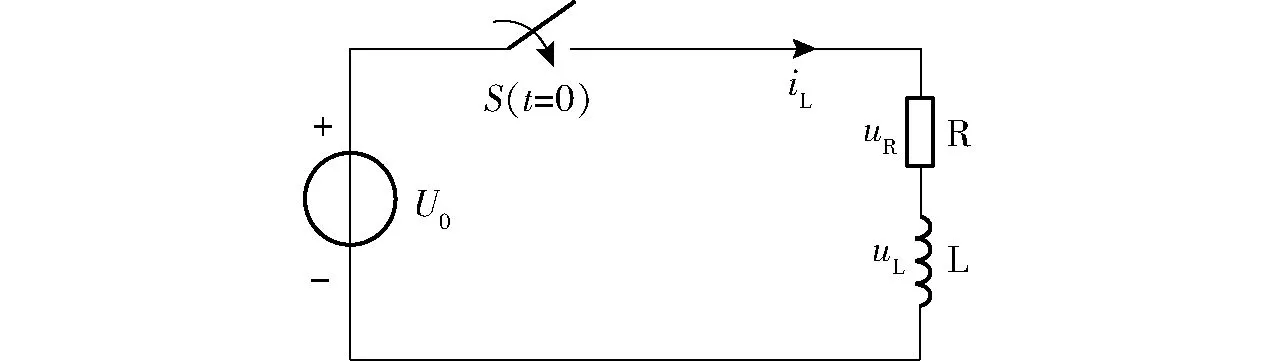
圖9 線圈簡化成RL電路圖Fig.9 Circuit diagram of coil simplified into RL
對于正階躍信號(hào)U(t),電感電流iL1的微分方程
(6)
式中R——電阻
L——電感
求解得電感電流iL1的響應(yīng)為
(7)
同理,對于負(fù)延遲階躍信號(hào)-U(t-T0),其產(chǎn)生的電感電流iL2的響應(yīng)為
(8)
由疊加原理得激勵(lì)線圈電流I的響應(yīng)為
(9)
線圈上電時(shí)產(chǎn)生磁場,磁路由“GMM棒-軛鐵-動(dòng)子-軛鐵-GMM棒”形成回路,忽略空氣隙對磁路的影響和漏磁現(xiàn)象,各零件的磁阻與磁導(dǎo)率呈反比,而GMM棒的磁導(dǎo)率遠(yuǎn)小于其他零件,GMM棒的磁動(dòng)勢占據(jù)了磁回路大部分的磁動(dòng)勢,可增加修正系數(shù)e表示GMM棒的磁場強(qiáng)度[6],即
(10)
式中n——線圈匝數(shù)lC——線圈長度
H——GMM棒的磁場強(qiáng)度
I——電流
磁化強(qiáng)度M由J-A模型求得
(11)
式中He——GMM棒的有效磁場強(qiáng)度
α——磁疇疇壁間相互作用系數(shù)
Hσ——預(yù)應(yīng)力產(chǎn)生的磁場強(qiáng)度
Man——可逆的無磁滯磁化強(qiáng)度
MS——飽和磁化強(qiáng)度
a——無磁滯磁化強(qiáng)度形狀系數(shù)
Mirr——疇壁移動(dòng)產(chǎn)生的不可逆磁化強(qiáng)度
Mrev——疇壁轉(zhuǎn)動(dòng)產(chǎn)生的不可逆磁化強(qiáng)度
δ——常數(shù)
k——不可逆損耗系數(shù)

c——可逆系數(shù)
應(yīng)變模型采用基于能量法的二次疇轉(zhuǎn)模型,即
(12)
式中λ——磁致伸縮應(yīng)變
λS——飽和磁致伸縮系數(shù)
將GMM棒和柔性鉸鏈簡化成“質(zhì)量-彈簧-阻尼”元件,GMM棒輸出端、負(fù)載和柔性鉸鏈剛性相連,具有相同的位移、速度和加速度,超磁致伸縮驅(qū)動(dòng)器的動(dòng)力學(xué)過程可簡化為等效單自由度力學(xué)模型,如圖10所示,圖中MG、KG和CG分別為GMM棒的等效質(zhì)量、等效剛度和等效阻尼,MR、KR和CR分別為疊加式柔性鉸鏈的等效質(zhì)量、等效剛度和等效阻尼,ML為負(fù)載等效質(zhì)量,y為位移。

圖10 等效力學(xué)模型Fig.10 Equivalent mechanical model
驅(qū)動(dòng)器的動(dòng)態(tài)微分方程為

(13)
式中EH——GMM棒的楊氏模量
A——GMM棒的橫截面積

(14)
5 實(shí)驗(yàn)和結(jié)果分析
5.1 實(shí)驗(yàn)系統(tǒng)
動(dòng)子采用線切割技術(shù)整體加工而成,為保證硬度進(jìn)行淬火處理;驅(qū)動(dòng)和箝位GMM棒尺寸分別為φ3×20 mm和φ3×15 mm;驅(qū)動(dòng)和箝位線圈匝數(shù)分別為270匝和230匝;漆包線線徑為0.41 mm,激光測距儀的分辨率為0.03 μm。樣機(jī)安裝在光學(xué)平臺(tái)上,以減少外界環(huán)境對實(shí)驗(yàn)系統(tǒng)的影響,實(shí)驗(yàn)系統(tǒng)如圖11所示。

圖11 實(shí)驗(yàn)系統(tǒng)Fig.11 Experiment system1.樣機(jī) 2.激光測距儀
5.2 輸出位移特性分析
當(dāng)頻率f=1 Hz、鉗緊電壓為2 V時(shí),在不同驅(qū)動(dòng)電壓下,系統(tǒng)位移輸出特性如圖12所示。在不同驅(qū)動(dòng)電壓下,輸出位移曲線都呈階梯狀,表明設(shè)計(jì)的驅(qū)動(dòng)器能夠?qū)崿F(xiàn)位移的累積輸出,理論上導(dǎo)軌無限長時(shí),直線驅(qū)動(dòng)器的行程可達(dá)無限大。另外,每條階梯狀曲線的“踏面”并不平直,出現(xiàn)了5次規(guī)律性的振動(dòng),這是由于在一個(gè)周期內(nèi),系統(tǒng)除了進(jìn)行“驅(qū)動(dòng)”動(dòng)作、還要進(jìn)行“固定、解脫、復(fù)位”等5個(gè)動(dòng)作,這些動(dòng)作會(huì)對系統(tǒng)的位移輸出產(chǎn)生影響。

圖12 輸出位移特性曲線Fig.12 Output displacement characteristic curves
平均單步位移隨驅(qū)動(dòng)電壓的變化規(guī)律如圖13所示,在驅(qū)動(dòng)電壓較低時(shí)(<1 V),位移增長較緩慢;驅(qū)動(dòng)電壓達(dá)到中等電壓時(shí)(1~3 V),輸出位移基本呈線性增長;達(dá)到高電壓時(shí)(>3 V),曲線的增長趨勢又變得平緩。由于低電壓時(shí),GMM棒的應(yīng)變主要是易磁化方向的部分磁疇增大,此時(shí)磁致伸縮應(yīng)變響應(yīng)很小。中等電壓時(shí),所有磁疇都旋轉(zhuǎn)到易磁化方向,磁疇沿易磁化方向產(chǎn)生較大變化,磁致伸縮應(yīng)變與磁場強(qiáng)度基本呈線性關(guān)系。達(dá)到高電壓時(shí),所有磁疇旋轉(zhuǎn)到外磁場方向,磁致伸縮應(yīng)變響應(yīng)逐漸變小,逐漸達(dá)到飽和狀態(tài)。位移-電壓曲線的變化規(guī)律符合超磁致伸縮材料的性能特性[2]。

圖13 位移-電壓曲線Fig.13 Displacement-voltage curve
從圖13可以看出,通過位移模型得到的模擬值和實(shí)驗(yàn)值基本吻合,電壓較低時(shí)(<1 V),實(shí)驗(yàn)值略大于模擬值,主要由于驅(qū)動(dòng)電壓較低時(shí),外界振動(dòng)等因素對輸出位移的影響較大,輸出位移含有部分的外界振動(dòng)。電壓達(dá)到中等電壓時(shí)(1~3 V),模擬值和實(shí)驗(yàn)值基本重合,最大相對誤差為1.86%。電壓較高時(shí)(>3 V),實(shí)驗(yàn)值逐漸低于模擬值,由于未設(shè)置散熱裝置,線圈的溫升造成GMM磁致伸縮系數(shù)的減小,使得實(shí)驗(yàn)值低于模擬值。
圖14為不同驅(qū)動(dòng)電壓下的單步位移變化曲線,驅(qū)動(dòng)電壓為0.5 V時(shí),由于輸出位移較小,分步動(dòng)作和外界對輸出穩(wěn)定性的影響較大,最大相對誤差達(dá)到了6.33%,位移輸出穩(wěn)定性較差。隨著驅(qū)動(dòng)電壓的增大,位移輸出逐漸變得穩(wěn)定,最大相對誤差減少至2.69%。另外,實(shí)驗(yàn)中發(fā)現(xiàn)當(dāng)驅(qū)動(dòng)電壓大于3 V時(shí),長時(shí)間工作時(shí)驅(qū)動(dòng)線圈開始出現(xiàn)發(fā)熱現(xiàn)象。綜上所述,為保證驅(qū)動(dòng)器的輸出精度和工作狀態(tài),將工作電壓設(shè)定為1~3 V,此時(shí),驅(qū)動(dòng)的最小單步位移為4.55 μm,最大單步位移為12.01 μm。

圖14 單步位移的穩(wěn)定性Fig.14 Stability of one-step displacement
驅(qū)動(dòng)電壓為2 V時(shí),輸出速度隨頻率的變化規(guī)律如圖15所示,隨著頻率增加,輸出速度基本呈線性增長,但頻率大于150 Hz時(shí),由于振動(dòng)、響應(yīng)等因素的影響,在一個(gè)周期內(nèi),系統(tǒng)不能完全完成“固定、解脫”等6個(gè)分動(dòng)作,輸出速度開始下降。所以驅(qū)動(dòng)器的最高工作頻率為150 Hz,最快速度為1.34 mm/s。

圖15 速度-頻率曲線Fig.15 Velocity-frequency curve
6 結(jié)論
(1)設(shè)計(jì)了一種基于尺蠖運(yùn)動(dòng)形式的大行程精密直線驅(qū)動(dòng)器,實(shí)現(xiàn)了步進(jìn)式位移輸出。
(2)采用的疊加式柔性鉸鏈有效改善了柔性鉸鏈的受力情況,將柔性鉸鏈簡化成懸臂梁,計(jì)算出其等效剛度。
(3)建立的位移模型能夠準(zhǔn)確反映直線驅(qū)動(dòng)器的輸出位移,在工作電壓范圍內(nèi),最大相對誤差為1.86%。
(4)經(jīng)過實(shí)驗(yàn)測試,直線驅(qū)動(dòng)器工作電壓為1~3 V,最小和最大單步位移分別為4.55、12.01 μm,最高工作頻率為150 Hz,最快速度為1.34 mm/s;位移輸出狀態(tài)穩(wěn)定,最大相對誤差為2.69%。
