自動理瓶、在線檢測智能生產(chǎn)線的研制
2019-12-07 05:31:30包君喬國昌
科技與創(chuàng)新 2019年22期
包君,喬國昌
自動理瓶、在線檢測智能生產(chǎn)線的研制
包君,喬國昌
(山東交通職業(yè)學(xué)院,山東 濰坊 261206)
闡述了自動理瓶、在線檢測智能生產(chǎn)線的研制過程,該生產(chǎn)線采用國內(nèi)先進的視覺檢測技術(shù)和動態(tài)稱重技術(shù),利用機器人對散裝瓶體進行自動整理,并實現(xiàn)快速在線檢測瓶體或標(biāo)簽合格度。
自動理瓶;在線檢測;視覺檢測技術(shù);動態(tài)稱重技術(shù)
1 國內(nèi)外包裝機械及自動理瓶機發(fā)展現(xiàn)狀
據(jù)統(tǒng)計調(diào)查,中國包裝機械行業(yè)每年保持16%左右的增長速度,主要原因是包裝行業(yè)作為國民經(jīng)濟許多領(lǐng)域的配套產(chǎn)業(yè),是促進消費、彰顯價值的產(chǎn)業(yè),它的技術(shù)進步和配套服務(wù)能夠為其他產(chǎn)業(yè)帶來深刻的影響。先進的包裝機械大量采納新型檢測系統(tǒng),保證包裝機械的穩(wěn)定、可靠運轉(zhuǎn)。隨著自動化廠商對行業(yè)滲透的增加與信息技術(shù)的發(fā)展,越來越多的設(shè)計人員接受了先進的自動化技術(shù),并利用先進的自動化產(chǎn)品來提升設(shè)備的性能。中國的包裝機械行業(yè)有針對性地對產(chǎn)品工藝進行不斷改進和完善,實現(xiàn)了高新技術(shù)實用化、產(chǎn)品智能化。
自動理瓶機屬于包裝機械制造業(yè)。隨著社會的發(fā)展,生活水平的不斷提高。醫(yī)藥、化妝品行業(yè)的瓶裝產(chǎn)品的瓶體質(zhì)量和檢測速度變得尤其重要。傳統(tǒng)技術(shù)是人工理瓶及人工檢測,滿足不了生產(chǎn)要求。自動理瓶、在線檢測智能生產(chǎn)線是利用機器人對散裝瓶體進行自動整理,包括瓶體方向、排序,標(biāo)簽的識別、定位一次整理完成,速度也能達到生產(chǎn)節(jié)拍的要求。更重要的是可以將瓶體放到高速運轉(zhuǎn)的輸送帶上,通過2D或3D攝像頭快速在線檢測瓶體或標(biāo)簽合格度。在國內(nèi),處于技術(shù)領(lǐng)先地位。
2 產(chǎn)品工作原理
目前市場上,多數(shù)理瓶機的主要功能是將瓶子“放在”流水線上,人工目視檢測標(biāo)簽是否有污點,這樣效率低產(chǎn)品質(zhì)量難以保障。采用2D或3D攝像技術(shù)快速定位瓶體方向和抓取點,迅速擺放在流水線上,并采用高清攝像頭在線檢測瓶體形狀和標(biāo)簽污點,不合格的產(chǎn)品剔除流水線。大大提高了企業(yè)生產(chǎn)效率,節(jié)約勞動生產(chǎn)力。
自動理瓶、在線檢測智能生產(chǎn)線屬于包裝機械設(shè)備,本次設(shè)計主要是針對客戶指定的用于藥品包裝的塑料瓶,用于藥品生產(chǎn)車間,與裝片機、擰蓋機等組成智能化藥品包裝生產(chǎn)線。能夠利用人工智能深度學(xué)習(xí)技術(shù),自動適應(yīng)不同的瓶型及不同的污點類型,快速自動檢測不合格產(chǎn)品。此智能生產(chǎn)線能夠改善醫(yī)藥、化妝品行業(yè)的瓶體產(chǎn)品的檢測質(zhì)量和生產(chǎn)效率。
3 產(chǎn)品的主要結(jié)構(gòu)
3.1 智能機械手
機械手通過多次試驗和調(diào)試,通過對傳送帶上的塑料瓶進行正確的抓取和翻轉(zhuǎn),把產(chǎn)品按照要求的位置放置在傳送帶上,輸送給下一個工序。智能機械手如圖1所示。

圖1 智能機械手
3.2 視覺信號采集設(shè)備
生產(chǎn)線采用先進的視覺檢測系統(tǒng),通過光源和相機采集信號,結(jié)合視覺系統(tǒng)的軟件部分,經(jīng)過多次的調(diào)試,達到視覺檢測的精度要求。視覺檢測的數(shù)據(jù)與系統(tǒng)所要求的標(biāo)準(zhǔn)進行對比,篩出不合格的產(chǎn)品。視覺信號采集系統(tǒng)如圖2所示。
3.3 方鋼框架
方框框架采用整體的鋁型材框架,起到支撐零部件的作用。框架上安裝玻璃門窗,保護內(nèi)部的零部件及觀察生產(chǎn)線的運行情況,便于保養(yǎng)和維護。方鋼框架如圖3所示。

圖2 視覺信號采集系統(tǒng)
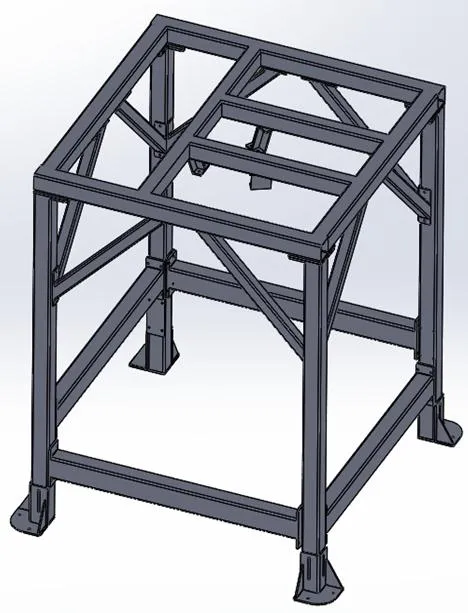
圖3 方鋼框架
3.4 進、出產(chǎn)品輸送系統(tǒng)
進、出產(chǎn)品輸送系統(tǒng)保證產(chǎn)品的傳輸。進、出產(chǎn)品輸送系統(tǒng)如圖4所示。
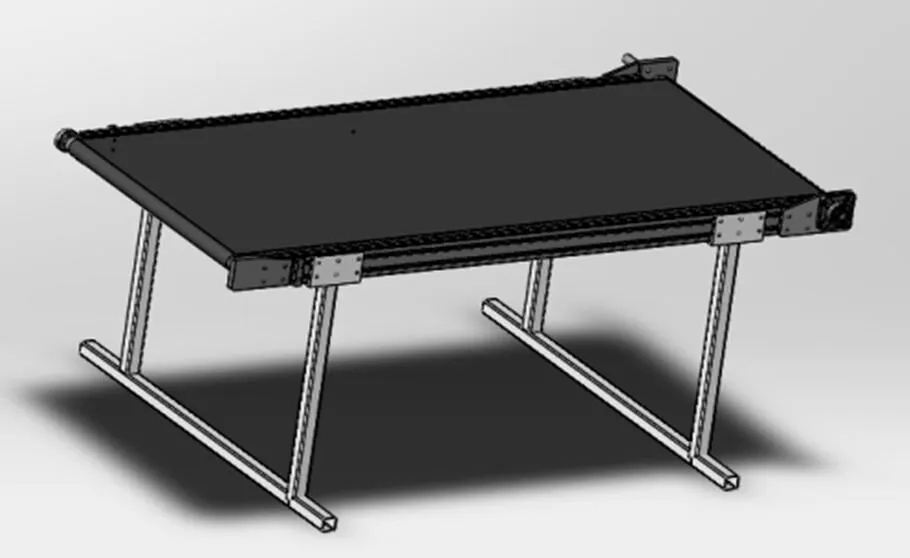
圖4 進、出產(chǎn)品輸送系統(tǒng)
4 產(chǎn)品研究的內(nèi)容
自動理瓶機工作時,瓶子通過產(chǎn)品輸送系統(tǒng)進入指定位置,運用視覺檢測系統(tǒng)采集信號,然后通過視覺檢測系統(tǒng)軟件部分進行分析計算,把信號輸送給機器手,機械手進行抓取,把瓶子送到傳送帶上,在傳送的同時,利用視覺檢測系統(tǒng)檢測產(chǎn)品表面的污點情況,以及標(biāo)簽的完整情況。在最后設(shè)置了剔除裝置,把不滿足表面質(zhì)量要求的產(chǎn)品,在生產(chǎn)線上刪除。
4.1 生產(chǎn)線軟件系統(tǒng)的設(shè)計
編程控制2D攝像頭對流水線上進入的瓶體進行拍照,并對瓶體編號、方向定位、確定抓取點,然后將信息傳輸給機器人。機器人內(nèi)部編程將瓶體抓取并準(zhǔn)確放到流水線上。最后利用流水線兩邊的高清攝像頭圖像傳感器從瓶體的兩面采集圖像信息,通過2D或3D視覺算法計算相應(yīng)結(jié)果,最終發(fā)出控制的信息。
4.2 整個自動生產(chǎn)線的軟硬件兼容,整體外觀設(shè)計
整合控制系統(tǒng)指令編輯、視覺標(biāo)定、模板匹配及視覺參數(shù)設(shè)定、傳送帶標(biāo)定等功能為一個整體控制箱。添加安全防護板及燈箱等機構(gòu),保障安全性及檢測質(zhì)量不受外部干擾。
5 產(chǎn)品的創(chuàng)新點
利用機器人對散裝瓶體進行自動整理。主要包括瓶體方向、排序,標(biāo)簽方向的識別、抓取點定位一次完成。采用2D或3D攝像技術(shù)快速定位瓶體方向和抓取點,同時將信號傳給機器人迅速抓取擺放在流水線上。可同時控制一臺或多臺機器人根據(jù)瓶身正反狀態(tài)和傾斜角度抓取、旋轉(zhuǎn)歸正,然后分別放置到輸送帶上。重復(fù)抓取位置精度可以控制在 ±0.5 mm以內(nèi)。采用高清攝像頭在線檢測瓶體形狀和標(biāo)簽污點,不合格的產(chǎn)品剔除流水線。利用人工智能深度學(xué)習(xí)技術(shù),自動適應(yīng)不同的瓶型以及不同的污點類型,快速自動檢測不合格產(chǎn)品。
自動理瓶、在線檢測智能生產(chǎn)線是利用機器人對散裝瓶體進行自動整理。包括瓶體方向、排序,標(biāo)簽方向的識別、抓取點定位一次完成。采用2D或3D攝像技術(shù)快速定位瓶體方向和抓取點,同時將信號傳給機器人迅速抓取擺放在流水線上。可同時控制一臺或多臺機器人根據(jù)瓶身正反狀態(tài)和傾斜角度抓取、旋轉(zhuǎn)歸正,然后分別放置到輸送帶上。重復(fù)抓取位置精度可以控制在±0.5 mm以內(nèi),節(jié)約了大量的人力物力,大大提高了企業(yè)的生產(chǎn)效率。
[1]李運華.機電控制[M].北京:北京航空航天大學(xué)出版社,2003.
TP391.41
A
10.15913/j.cnki.kjycx.2019.22.048
2095-6835(2019)22-0121-02
〔編輯:張思楠〕
猜你喜歡
現(xiàn)代裝飾(2022年4期)2022-08-31 01:39:32
現(xiàn)代裝飾(2022年3期)2022-07-05 05:55:06
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2015年1期)2015-08-13 02:23:50
玩具(2009年10期)2009-11-04 02:33:14