基于BP神經網絡PID控制在船舶閥門遙控系統中的應用
2019-12-13 07:22:50陳瑜
數字技術與應用 2019年9期
陳瑜
摘要:船舶閥門遙控系統是一個非線性、時變的控制系統。常規的PID控制由于局限性,不能較好地控制閥門開度,于是提出了BP神經網絡PID控制方法來控制船舶閥門開度,增強閥門遙控系統的性能。本文在介紹了常規PID控制的基礎上,通過對其重要參數采用神經網絡PID調控,可以使系統獲得更好的調節效果。
關鍵詞:船舶閥門遙控系統;BP神經網絡;常規PID控制
中圖分類號:TP273 文獻標識碼:A 文章編號:1007-9416(2019)09-0009-01
0 引言
在現代船舶工業中,控制船體平衡是一個重要課題。船只在裝卸貨物時肯定會出現載荷不平衡的狀態,此時必須通過調節液艙或壓載艙的液體來達到船體平衡。傳統的PID控制器構成的船舶閥門遙控系統不能很好地控制船舶各液艙及壓載艙的平衡。本文將各液艙及壓載艙壓力、液位、溫度等信號引入到控制系統中,通過BP神經網絡決策,使船舶液艙或壓載艙在突然產生變化時,預先調節閥門開度,同時把流量信號引入到控制系統。大大地降低了各液艙或壓載艙液位的超調量,優化了控制系統的調節能力[1]。
1 BP神經網絡PID控制在船舶閥門遙控系統中的應用
1.1 BP神經網絡
作為目前各領域應用最廣泛的神經網絡之一,BP(Back Propagation)神經網絡擁有其獨特的學習能力。它通過逆向傳播和前反饋訓練,存儲并學習大批次的輸入、輸出模式關系。
1.2 BP神經網絡的船舶閥門PID控制器
BP神經網絡的船舶閥門PID控制器主要由兩種控制器組成,一種是常規的PID控制器,另一種是神經網絡控制器NN。傳統PID控制器對船舶液艙、壓載艙采樣控制,三個參數、、根據船體平衡度狀態變化在線整定。神經網絡控制器包含NNI網絡識別器和NNC網絡控制器。它根據閥門遙控系統的運行參數變化狀態不斷學習,微調系數、從而整定PID的三個重要參數,達到控制性能的最優化[2]。
1.3 基于BP神經網絡的船舶閥門控制系統的結構組成
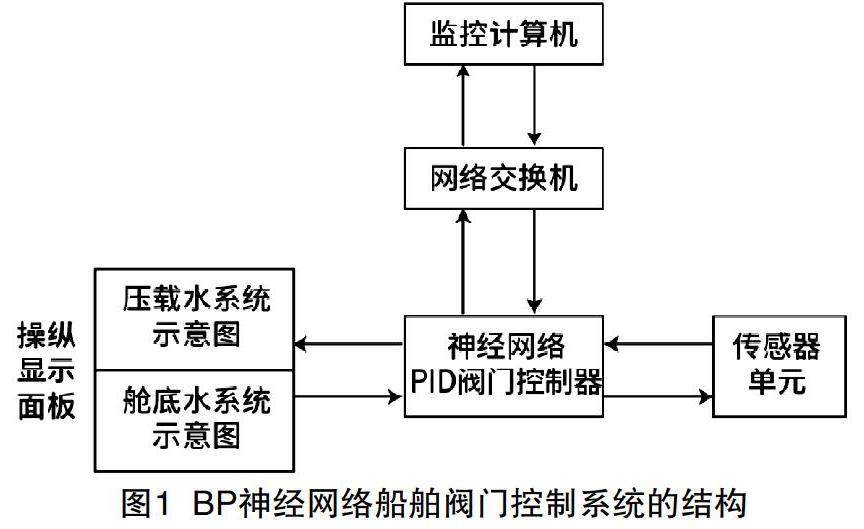
基于BP神經網絡PID控制的船舶閥門遙控系統如圖1所示分三層結構:傳感器單元、神經網絡PID閥門控制器、顯示操作單元。各個單元相互協作,先通過傳感器單元接受各類信號,后經神經PID控制器運算,輸出控制繼電器遠程控制閥門狀態。并通過網絡在監控計算機和操縱顯示面板上顯示出相關所有狀態參數。
1.3.1 傳感器單元
傳感器單元檢測各個液艙或者壓載艙的狀態信號,包括液位、溫度、壓力和船舶吃水狀態等。傳感器單元先將它們統一轉換為4到20mA電流信號,然后送入神經PID控制器,作為控制器的輸入信號。
1.3.2 神經網絡PID閥門控制器
控制器獲取各類傳感器信號,諸如閥門、泵的狀態信號和壓載艙或液艙液位、溫度、壓力信號等。通過神經PID運算,輸出控制繼電器遠程控制閥門狀態。神經PID控制器一方面通過網絡交換機與監控計算機建立通信,將接收到的信息發送給監控計算機。另一方面,通過神經網絡神經元,向操縱顯示面板發送信號,點亮壓載水或艙底水示意圖的相關指示燈,并且反映出閥門和泵的實時狀態。
1.3.3 顯示操作單元
同時,通過網絡向監控計算機以及操縱顯示面板傳送各閥門的關閉、閥門開度以及泵運行指示燈信號。
1.4 神經網絡PID閥門控制器硬件組成
神經網絡PID閥門控制器硬件主要由A/D轉換芯片、神經元芯片、D/A轉換芯片組成。傳感器單元采集的各液艙液位、壓力、溫度、流量信號時模擬信號,需要轉換成數字信號后才能由神經網絡芯片TMPN3150進行處理。
1.4.1 A/D轉換芯片
AD7888是一種多通道高精度A/D轉換器。它通常在單電源狀態下工作,效率高且低耗能。它包含8個模擬量輸入通道。每個模擬量輸入通道可單獨工作[3]。
1.4.2 神經元芯片TMPN3150
TMPN3150含有3個高效CPU。1號CPU是訪問控制處理器,它驅動硬件并且執行神經網絡算法。2號CPU是網絡處理器,它處理網絡變量、控制網絡通訊端口,負責發送接受數據包。3號CPU是執行處理器,它執行用戶創建的代碼應用程序。
1.4.3 D/A轉換芯片
TLV5616是一種數字模擬轉換器。它擁有4條獨立的串行接口,能夠將各個串行口無縫連接。它的數字量電源及模擬量電源分別獨立供給,電源電壓范圍在2.7V至5V之間。
1.5 基于BP神經網絡的PID船舶閥門控制系統軟件組成
系統軟件主要包括初始化子程序、數據收集子程序、神經網絡自適應控制子程序、參數發送和顯示子程序。軟件功能為先進入初始化子程序,然后實時采集各液艙和壓載艙溫度、壓力、液位等信號。在船舶載荷變化產生艙位不平衡工況時,根據神經網絡自適應控制算法,通過控制閥門開閉及閥門開度進行系統控制,最終實現各艙位平衡。
2 結語
本文提出了一種基于BP神經網絡PID控制的船舶閥門遙控系統。在船舶載荷突然產生變化、液艙或壓載艙出現不平衡時,基于BP神經網絡PID控制的船舶閥門遙控系統比傳統控制系統具有更好的控制效果,在更短的時間內平衡船體,且比傳統控制方式超調量更小。控制系統硬件、軟件結構簡單,比較容易實現,應用前景較為廣闊。
參考文獻
[1] 靳占光.多功能船舶閥門系統微機系統控制方案[J].海洋技術,2014,23(03):130-133.
[2] 舒懷林.PID神經網絡及其控制系[M].北京:國防工業出版社,2006.
[3] 閻石.數字電子技術基礎[M].北京:高等教育出版社,2003.
Abstract:The ship valve remote control system is a nonlinear and time-varying control system. Due to the limitation of conventional PID control, the valve opening cannot be well controlled, so the BP neural network PID control method is proposed to control the valve opening of the ship and enhance the performance of the remote control system of the valve.In this paper, based on the conventional PID control, through the neural network PID control of its important parameters, the system can obtain better regulation effect.
Key words:ship valve remote control system; BP neural network; traditional PID controller
