基于模擬退火算法的元器件布局優(yōu)化設(shè)計(jì)
2019-12-19 08:57:32潘忠文李文釗
導(dǎo)彈與航天運(yùn)載技術(shù) 2019年6期
沈 博,潘忠文,林 宏,李文釗
(北京宇航系統(tǒng)工程研究所,北京,100076)
0 引 言
電子設(shè)備一般含有眾多精密的電子部件,為滿足特種需求,需要安裝在特殊平臺(tái)上使用。當(dāng)電子設(shè)備在經(jīng)受平臺(tái)輸入的振動(dòng)等力學(xué)環(huán)境作用時(shí),其印制電路板(Printed Circuit Board,PCB)基板發(fā)生較大的動(dòng)態(tài)彎曲變形,這是導(dǎo)致電子設(shè)備失效的重要原因。如果在設(shè)計(jì)中能預(yù)估PCB 基板在振動(dòng)作用下的應(yīng)力,并對(duì)元器件的布局進(jìn)行優(yōu)化,降低元器件管腳部位的應(yīng)力值,便能改善PCB 板的力學(xué)環(huán)境,提高產(chǎn)品的可靠性。
傳統(tǒng)的通過(guò)振動(dòng)試驗(yàn)進(jìn)行動(dòng)力學(xué)分析的手段不僅耗費(fèi)成本及時(shí)間,同時(shí)也難以把握電子系統(tǒng)內(nèi)部元器件結(jié)構(gòu)特性變化,而有限元仿真可以有效彌補(bǔ)上述缺陷。因此在優(yōu)化時(shí),往往通過(guò)有限元仿真進(jìn)行驗(yàn)證。朱繼元[1]等通過(guò)對(duì)固有頻率計(jì)算式的分析,得到應(yīng)當(dāng)盡量把大而重的元器件在靠近約束的地方的結(jié)論。馬靜[2]通過(guò)計(jì)算元器件5 種典型布局下的結(jié)果,分析得到了合適的布局方案。黃展達(dá)[3]提出了3 種基于剛度擴(kuò)散法的新方法用于解決不同類別的結(jié)構(gòu)布局優(yōu)化問(wèn)題,但只研究了矩形組件的情況。
由于板上元器件數(shù)量較大、可調(diào)位置較多,一般情況下無(wú)法對(duì)所有情況進(jìn)行遍歷尋優(yōu)。往往先通過(guò)計(jì)算多個(gè)典型位置下的模型結(jié)果,進(jìn)行比較分析,從而提出對(duì)其布局優(yōu)化的意見(jiàn)。但由于受到典型位置選取不全的限制,優(yōu)化結(jié)果往往不是最優(yōu)的。近年來(lái),智能優(yōu)化算法得到重視,它能克服傳統(tǒng)優(yōu)化算法的局限性并實(shí)現(xiàn)全局尋優(yōu)[4~6]。李曄[7]等用微元體熱平衡法建立了電子系統(tǒng)熱分析求解溫度場(chǎng)的數(shù)學(xué)模型,采用蟻群算法根據(jù)數(shù)學(xué)模型進(jìn)行優(yōu)化,最后通過(guò)仿真進(jìn)行驗(yàn)證。劉孝保[8]等對(duì)ANSYS 進(jìn)行二次開(kāi)發(fā),采用遺傳算法改變板上元器件的布局,對(duì)整體的模態(tài)頻率進(jìn)行了優(yōu)化。
在對(duì)電路板上元器件的位置進(jìn)行優(yōu)化時(shí),智能優(yōu)化算法中的遺傳算法、蟻群算法等都可以使用。但本文優(yōu)化過(guò)程的控制變量,即優(yōu)化的元器件只有一個(gè),無(wú)法凸顯遺傳算法及蟻群算法多維的特點(diǎn)。相比之下,針對(duì)此類問(wèn)題,模擬退火算法(Simulated Annealing,SA)更易編程實(shí)現(xiàn),且不影響計(jì)算效率。因此本文采用模擬退火算法,在有限元仿真計(jì)算的基礎(chǔ)上對(duì)元器件的布局進(jìn)行優(yōu)化。在優(yōu)化模型的求解中,提出改進(jìn)的模擬退火算法,并采用參數(shù)化建模的思想,實(shí)現(xiàn)了MATLAB 與NASTRAN 的交互尋優(yōu),達(dá)到優(yōu)化元器件布局、改善力學(xué)環(huán)境的目的。
1 電路板有限元仿真
本文以某電子設(shè)備中的電路板為研究對(duì)象,采用有限元軟件PATRAN 建模。構(gòu)建模型時(shí),PCB 板以面單元的方式構(gòu)建,采用四節(jié)點(diǎn)板殼單元(Quad4)進(jìn)行建模,板上元器件采用對(duì)面單元拉伸成體單元(Hex8)的方式進(jìn)行建模。有限元模型見(jiàn)圖1。
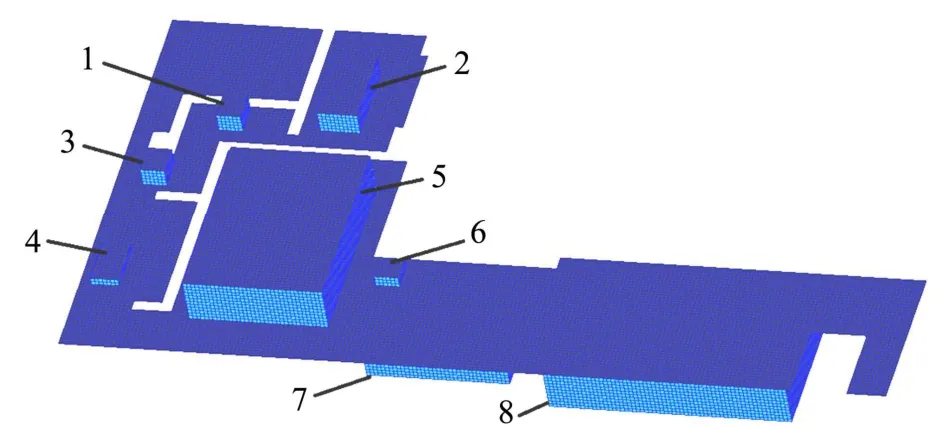
圖1 電路板有限元模型 Fig.1 Finite Element Model
6 號(hào)元器件周圍布局空曠,可調(diào)位置最多,通過(guò)優(yōu)化其布局改善該元器件所處的力學(xué)環(huán)境的效果最為明顯,因此本文重點(diǎn)關(guān)注6 號(hào)元器件。對(duì)于電路板上的其他元器件,同樣可以采用本文的方法進(jìn)行優(yōu)化,在此不做贅述。
電路板通過(guò)螺栓安裝在平臺(tái)上,螺栓連接方式限制了X,Y,Z3 個(gè)方向的移動(dòng),因此約束為限制模型邊界上的全部自由度。根據(jù)實(shí)際工作情況,電路板受到的載荷來(lái)自平臺(tái)的振動(dòng),在模型中螺栓所在位置的節(jié)點(diǎn)處施加Z 方向加速度正弦激勵(lì),加速度幅值為1g,頻率區(qū)間為20~2000 Hz,初步設(shè)置模態(tài)阻尼比為0.01。計(jì)算過(guò)程中板與元器件均采用線彈性本構(gòu)方程模型,各部分所使用的材料參數(shù)如表1 所示。
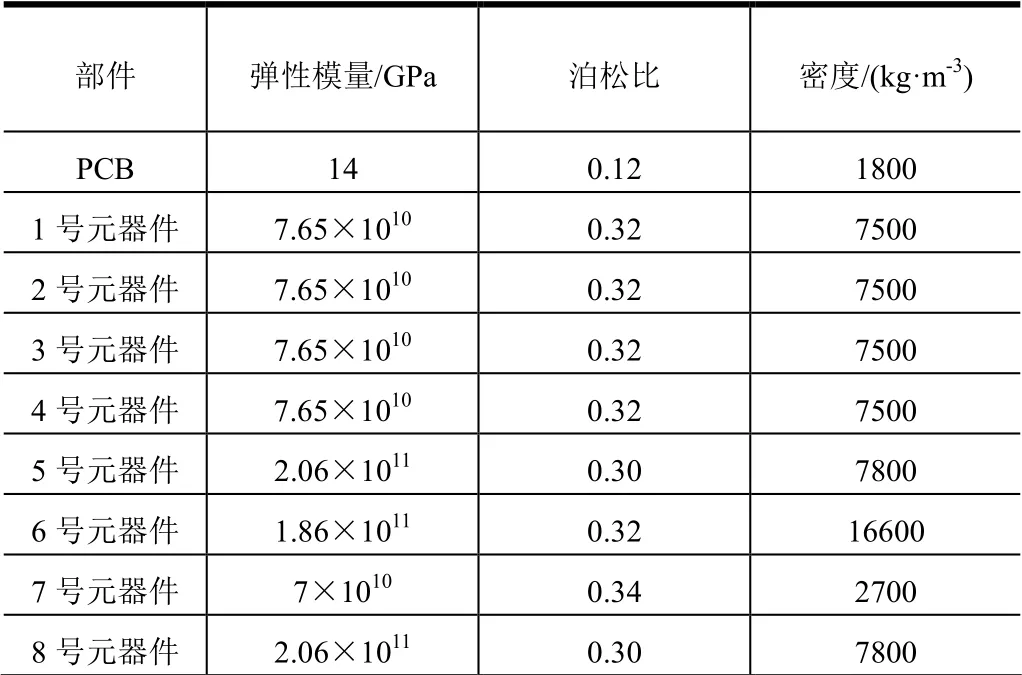
表1 材料參數(shù) Tab.1 Material Parameters
2 模擬退火算法及改進(jìn)
2.1 模擬退火算法
模擬退火算法最早由Metropolis 在1953 年提出,并在1983 年得到發(fā)展,Kirkpareick 成功地將其應(yīng)用于復(fù)雜組合最優(yōu)化問(wèn)題的求解。至今,模擬退火算法已在工程中得到了廣泛的應(yīng)用,其收斂性理論研究也較為完善。模擬退火算法是通過(guò)模仿熱力學(xué)中的退火過(guò)程,以一定的概率選擇鄰域中的解,以達(dá)到全局尋優(yōu)的目的。整個(gè)過(guò)程分為加溫過(guò)程、等溫過(guò)程以及降溫過(guò)程。加溫過(guò)程設(shè)定初始溫度,作為迭代尋優(yōu)的起始點(diǎn);等溫過(guò)程計(jì)算在當(dāng)前溫度下搜索的結(jié)果、并判斷是否進(jìn)行更新,判斷時(shí)采用Metropolis 準(zhǔn)則,即滿足下列兩式之一便更新當(dāng)前狀態(tài)的目標(biāo)函數(shù)值:

式中if 為前狀態(tài)下的目標(biāo)函數(shù)值;jf 為新?tīng)顟B(tài)下的目標(biāo)函數(shù)值;kT 為當(dāng)前狀態(tài)溫度;ξ 為0~1 之間的隨機(jī)數(shù)。
式(2)的目的是在迭代過(guò)程中可以跳出局部最優(yōu)解的情況。降溫過(guò)程將當(dāng)前溫度kT 從初始溫度0T 以一定比例下降到終止溫度f(wàn)T 。降溫函數(shù)為

式中r 為降溫比例,一般為0.9~1,r 越大,溫度下降得越慢。通過(guò)加溫過(guò)程、等溫過(guò)程和降溫過(guò)程,模擬退火算法最終可以得到目標(biāo)函數(shù)低的優(yōu)解。
考慮到模擬退火算法的上述特點(diǎn)及優(yōu)越性,本文基于模擬退火算法對(duì)PCB 板上的元器件布局進(jìn)行了優(yōu)化,所用模擬退火算法優(yōu)化參數(shù)如表2 所示。
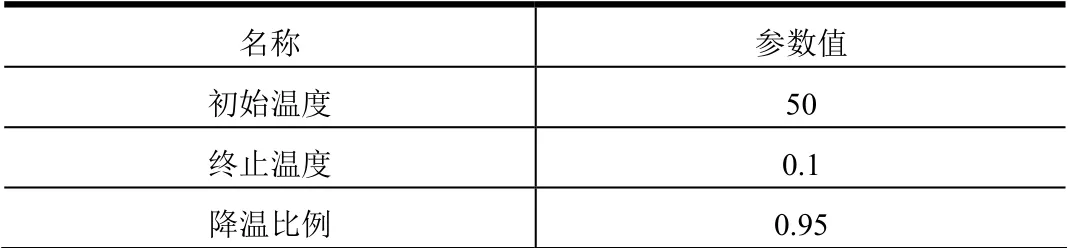
表2 模擬退火算法的優(yōu)化參數(shù) Tab.2 Optimization Parameters of Simulated Annealing Algorithm
2.2 適應(yīng)性改進(jìn)
為使模擬退火算法更適用于元器件的布局優(yōu)化,在編程時(shí)對(duì)其進(jìn)行了適應(yīng)性的改進(jìn),主要有以下幾個(gè)方面:
a)考慮到程序調(diào)用NASTRAN 進(jìn)行計(jì)算時(shí)間較長(zhǎng),將每次的計(jì)算結(jié)果進(jìn)行存儲(chǔ),避免對(duì)同一狀態(tài)重復(fù)計(jì)算,可縮短迭代時(shí)間;
b)由于每個(gè)當(dāng)前狀態(tài)的鄰域有限,優(yōu)化過(guò)程中記錄已搜索的鄰域,避免向同一鄰域進(jìn)行重復(fù)搜索,可提高收斂速度。
3 元器件布局優(yōu)化設(shè)計(jì)
元器件管腳處的加速度及應(yīng)力值是衡量PCB 板力學(xué)環(huán)境的一個(gè)重要指標(biāo)。在材料性能符合要求的情況下,加速度及應(yīng)力值的降低意味著元器件壽命的增長(zhǎng),這對(duì)電路板甚至整個(gè)電子設(shè)備的可靠性都尤為重要。
降低元器件管腳處加速度及應(yīng)力值的最有效方法為調(diào)整元器件的布局。布局優(yōu)化是對(duì)電路板模型的設(shè)計(jì)與重做。為實(shí)現(xiàn)建模的自動(dòng)化,采用參數(shù)化建模的思想,通過(guò)對(duì)其模型文件內(nèi)的節(jié)點(diǎn)、單元等相關(guān)數(shù)據(jù)進(jìn)行更改,實(shí)現(xiàn)模型的更新。并在此基礎(chǔ)上,與有限元計(jì)算軟件NASTRAN 進(jìn)行交互,得到新模型的計(jì)算結(jié)果,從而判斷在新布局下目標(biāo)函數(shù)值是否有所降低。
3.1 目標(biāo)函數(shù)
本文選擇管腳處的加速度平均值作為優(yōu)化的目標(biāo)函數(shù)。有限元計(jì)算輸出文件中包含X、Y、Z 3 個(gè)方向加速度的實(shí)部和虛部值。先求出3 個(gè)方向加速度各自的模長(zhǎng),再計(jì)算總的加速度大小。公式如下:

式中a11,a12,a21,a22,a31,a32分別為X、Y、Z 3 個(gè)方向加速度的實(shí)部和虛部值。
3.2 約束條件
具體約束條件為:
a)與其他元器件距離不小于8 mm,便于元器件的安裝;
b)與電路板邊界距離不小于3 mm,不妨礙電路板與平臺(tái)的連接。
3.3 MATLAB 與NASTRAN 交互方法
本文利用NASTRAN 與MATLAB 進(jìn)行聯(lián)合編程,既能利用程序?qū)崿F(xiàn)算法強(qiáng)大的搜索能力,又能實(shí)現(xiàn)當(dāng)前狀態(tài)的有限元計(jì)算,軟件交互過(guò)程如圖2 所示。

圖2 交互過(guò)程 Fig.2 Interaction Process
優(yōu)化模型的建立和計(jì)算結(jié)果的讀取都利用MATLAB 編程實(shí)現(xiàn),同時(shí)利用NASTRAN 進(jìn)行有限元計(jì)算,輸出計(jì)算結(jié)果。由MATLAB 編程控制NASTRAN計(jì)算的輸入?yún)?shù),并讀取計(jì)算結(jié)果,然后產(chǎn)生并輸出下一次迭代的元器件位置參數(shù)。通過(guò)上述循環(huán)迭代過(guò)程,最終實(shí)現(xiàn)優(yōu)化問(wèn)題的求解。
現(xiàn)階段PATRAN 和NASTRAN 的計(jì)算過(guò)程為:首先使用PATRAN 進(jìn)行建模,選擇分析類型并設(shè)置參數(shù),輸出為記錄了模型節(jié)點(diǎn)和單元信息的bdf 文件;然后使用NASTRAN 對(duì)bdf 文件進(jìn)行計(jì)算,得到記錄計(jì)算結(jié)果(位移、加速度或應(yīng)力)的f06 文件;再通過(guò)PATRAN 導(dǎo)入結(jié)果文件,可將結(jié)果可視化并畫出曲線。
為使優(yōu)化過(guò)程自動(dòng)化,避免對(duì)建模信息的手動(dòng)更改,本章使用MATLAB 對(duì)原有bdf 文件中模型的節(jié)點(diǎn)和單元信息進(jìn)行更改,通過(guò)改變模型的參數(shù)實(shí)現(xiàn)了模型的重建,改變了元器件的位置,而保證其他元素不發(fā)生改變;再在MATLAB 平臺(tái)上調(diào)用NASTRAN 對(duì)更改后的bdf 文件進(jìn)行計(jì)算,得到元器件處于新位置時(shí)的結(jié)果文件f06;最后通過(guò)MATLAB 讀取f06 文件中的結(jié)果信息,畫出曲線。這樣就在MATLAB 上實(shí)現(xiàn)了模型重建、有限元計(jì)算、結(jié)果讀取整個(gè)過(guò)程,為智能優(yōu)化算法的使用提供了基礎(chǔ)。
3.4 優(yōu)化結(jié)果
在當(dāng)前網(wǎng)格密度情況下,6 號(hào)元器件滿足約束條件的可調(diào)位置有840 種。若遍歷搜索,對(duì)所有位置的結(jié)果都進(jìn)行分析計(jì)算,按每個(gè)位置計(jì)算時(shí)間約為7 min計(jì)算,則所需時(shí)間約為98 h,即需要連續(xù)計(jì)算4 天以上。通過(guò)遍歷搜索,得到最優(yōu)解為13.08 m/s2。
采用模擬退火算法對(duì)6 號(hào)元器件位置進(jìn)行優(yōu)化,目標(biāo)函數(shù)的某一次優(yōu)化過(guò)程如圖3 所示。由圖3 可以看出,開(kāi)始迭代時(shí)加速度值得到大幅下降,隨著迭代次數(shù)的增加,元器件逐漸向著加速度最小化的方向移動(dòng),最終收斂于13.08 m/s2。

圖3 應(yīng)力值優(yōu)化的收斂結(jié)果 Fig.3 Convergence Result of Stress Value Optimization
為驗(yàn)證程序的穩(wěn)定性,重復(fù)運(yùn)行5 次,記錄下每次的運(yùn)行時(shí)間及結(jié)果,如表3 所示。

表3 優(yōu)化結(jié)果 Tab.3 Optimization Results
程序平均運(yùn)行時(shí)間為394.4 min,約6.5 h。運(yùn)行時(shí)間的長(zhǎng)短與初始解有關(guān),即與隨機(jī)選擇的元器件初始位置有關(guān),而且在優(yōu)化過(guò)程中搜索的方向具有隨機(jī)性。
可見(jiàn),采用改進(jìn)后的模擬退火算法進(jìn)行搜索尋優(yōu),所需時(shí)間平均為394.4 min,與遍歷搜索相比,時(shí)間縮短為原來(lái)的1/15,5次搜索的結(jié)果中有2次全局最優(yōu)解,且其余3 次結(jié)果的效果并不差。
優(yōu)化前后的元器件有限元模型如圖4 所示。優(yōu)化后的位置與其他元器件距離均大于8 mm,與電路板邊界大于3 mm,符合約束要求。優(yōu)化后位置與優(yōu)化前Y軸坐標(biāo)相同,僅X 軸坐標(biāo)發(fā)生變化,即向X 軸正方向平移11 mm。
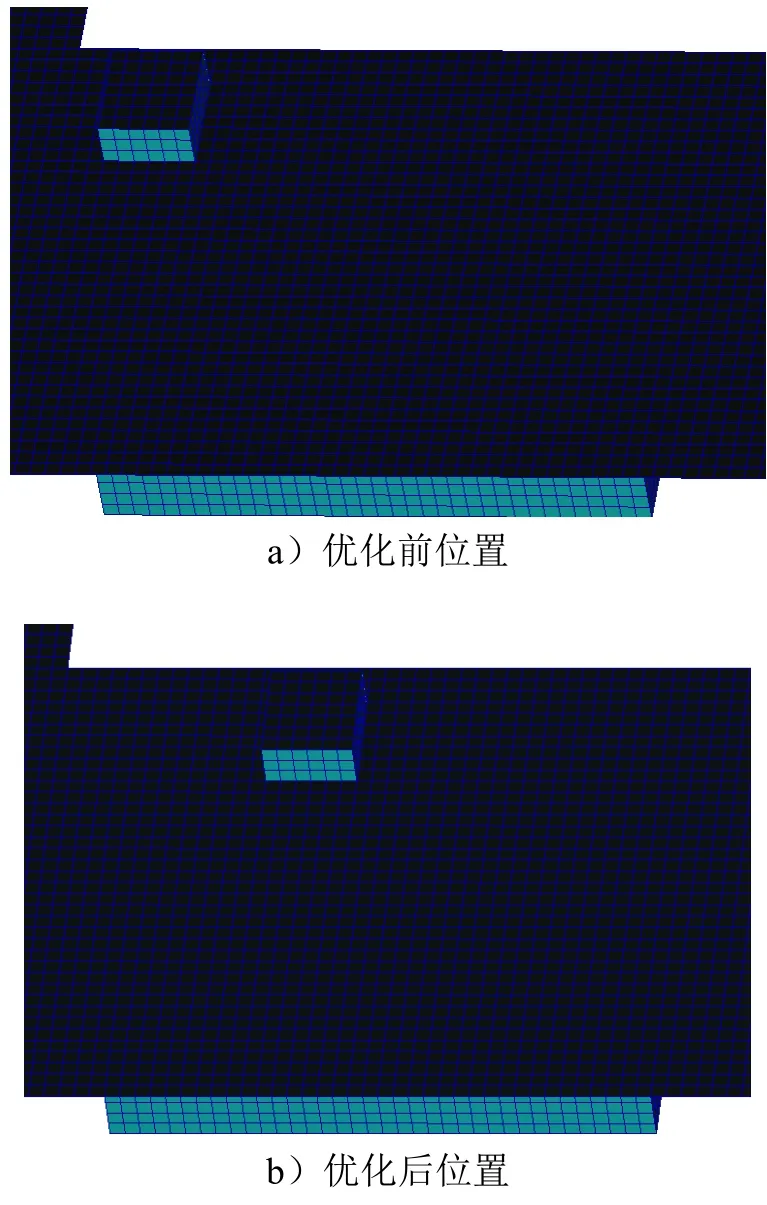
圖4 優(yōu)化前后的電路板模型 Fig.4 Board Model Before and After Optimized
優(yōu)化后元器件管腳處加速度平均值的頻響曲線如圖5 所示。與優(yōu)化前相比,優(yōu)化后加速度平均值的頻響曲線峰值得到降低。元器件位于優(yōu)化前的位置時(shí),管腳處加速度平均值最大為24.0 m/s2;位于優(yōu)化后的位置時(shí),加速度平均值最大僅為13.1 m/s2,降低比例為45.4%。且頻響曲線達(dá)到各個(gè)峰值時(shí)的頻率基本不變,說(shuō)明優(yōu)化后元器件位置的改變對(duì)其模態(tài)頻率影響較小。
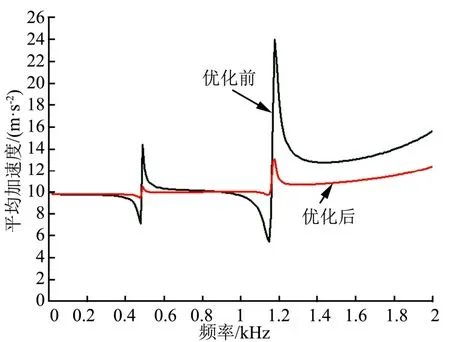
圖5 優(yōu)化前后加速度平均值頻響曲線(Z 向) Fig.5 The Mean Acceleration Response Curve Before and After Optimization (Z direction)
計(jì)算了優(yōu)化前后元器件兩個(gè)位置下管腳處的應(yīng)力平均值,如圖6 所示。與優(yōu)化前相比,優(yōu)化后應(yīng)力平均值的頻響曲線峰值得到降低。元器件位于優(yōu)化前的位置時(shí),管腳處應(yīng)力平均值最大為0.442 MPa;位于優(yōu)化后的位置時(shí),應(yīng)力平均值最大僅為0.155 MPa,降低比例為64.9%。頻響曲線達(dá)到各個(gè)峰值時(shí)的頻率同樣基本不變。可見(jiàn),根據(jù)管腳加速度值進(jìn)行優(yōu)化得到的元器件位置,其管腳應(yīng)力值也得到了大幅降低。
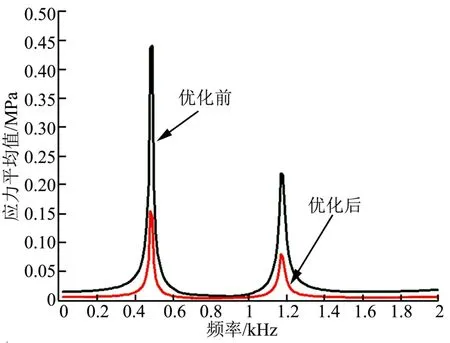
圖6 優(yōu)化前后應(yīng)力平均值頻響曲線(Z 向) Fig.6 The Mean Stress Response Curve Before and After Optimization (Z direction)
4 結(jié) 論
本文在有限元建模分析的基礎(chǔ)上,利用參數(shù)化建模的思想實(shí)現(xiàn)了MATLAB 與NASTRAN 的交互,并通過(guò)編程實(shí)現(xiàn)了改進(jìn)后的模擬退火算法在元器件布局上的應(yīng)用,降低了元器件管腳處的加速度及應(yīng)力值,改善了電路板的力學(xué)環(huán)境,延長(zhǎng)了電子設(shè)備的使用壽命,提高了整體的可靠性。優(yōu)化結(jié)果表明,采用的元器件布局優(yōu)化方法是合理可行的,具有實(shí)用價(jià)值和推廣意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
