電動舵機魯棒干擾補償控制
2019-12-19 09:03:18孫立偉鐘宜生姜雨石
導彈與航天運載技術 2019年6期
孫立偉,鐘宜生,姜雨石
(1. 哈爾濱建成集團有限公司,哈爾濱,150030;2. 清華大學,北京,100084;3. 哈爾濱工業(yè)大學,哈爾濱,150001)
0 引 言
舵機是精確制導武器制導控制系統(tǒng)設計中的必要組成部分。在實際工作中,電動舵機部分參數(shù)會隨工況變化,且受不穩(wěn)定載荷的影響,導致舵機控制精度和魯棒穩(wěn)定性下降。因此,如何提高電動舵機魯棒性受到越來越多的關注。樊澤明[1]等設計了電動舵機混合靈敏度H∞魯棒控制器,吳春[2]等完成了基于障礙Lyapunov 函數(shù)的輸出有界全局收斂魯棒控制,兩種方法有效提高了對象對參數(shù)攝動的魯棒性,但是保守性強,結構復雜;張月玲[3]和孫章軍[4]等基于滑模變結構原理分別設計了舵機滑模控制器,有效提高了舵機的動態(tài)品質(zhì),但在實際應用中存在高頻抖振。周林陽[5]和林大鵬[6]等針對電動舵機設計了自抗擾控制器,有效保證了舵機的魯棒性,但未對該方法的魯棒穩(wěn)定性進行分析與證明。楊書生[7]等針對永磁同步電機調(diào)速系統(tǒng),應用信號補償?shù)聂敯艨刂品椒ǎ摲椒ㄈ〉昧溯^好的控制效果。
本文針對電動舵機,提出了一種基于魯棒信號補償?shù)目刂品椒ā嶋H受控對象視為由一標稱受控對象加上參數(shù)攝動,針對標稱受控對象設計了一階濾波的PID 控制算法,針對參數(shù)攝動項,設計了魯棒干擾補償控制器對參數(shù)攝動項引起的“等價干擾”進行精確補償,并給出了算法魯棒穩(wěn)定性的證明過程。
1 電動舵機模型及不確定性分析
1.1 舵機模型
受控對象為帶減速器的直流無刷電機。忽略粘性摩擦的影響,無刷直流電機動態(tài)方程可表示為

式中ud為電樞電壓;e 為電機反電勢;R 為電樞回路總電阻;id為電樞電流;L 為電樞回路總電感;Te為電磁力矩;TL為負載總力矩;GD2為折算到電機軸上的飛輪慣量;n 為電機輸出轉(zhuǎn)速;Ce為反電勢常數(shù);Cm為轉(zhuǎn)矩常數(shù)。
定義下列常數(shù):電樞回路的電磁時間常數(shù),T1=L /R,電機的機電時間常數(shù)Tm=GD2R/375CeCm。
電動舵機的結構框圖如圖1 所示。
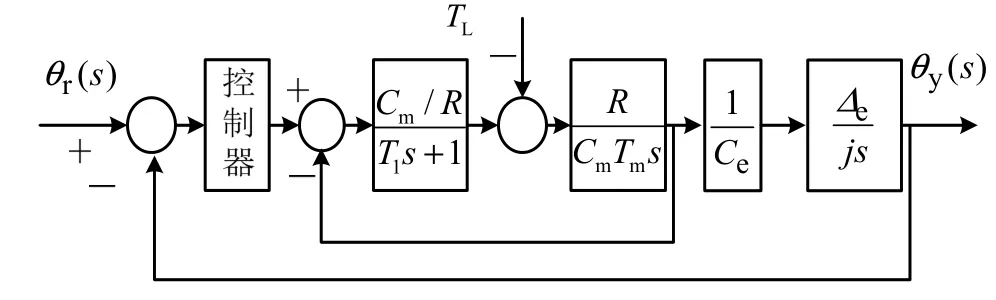
圖1 電動舵機閉環(huán)控制系統(tǒng)結構 Fig.1 The Structure About Closed-loop Control System of Electric Actuator
1.2 不確定性分析
在實際工作中,電機參數(shù)會隨著溫度、轉(zhuǎn)速等條件的變化而改變。空載時受控對象模型為


此外,舵機推動舵面時要承受較大鉸鏈力矩,其變化勢必引起舵機動態(tài)特性的變化。因此含有參數(shù)攝動和力矩擾動的實際受控對象可描述為

令受控對象的標稱模型為

則實際受控對象可描述為

定義向量θy(t)為

a)假設1:TL及其微分均為分段連續(xù)時變且一致有界的函數(shù),且其幅值已知;受控對象參數(shù)不確定界已知。
b)假設2:θr是已知分段連續(xù)時變且一致有界的函數(shù)。
從假設1、假設2 及式(7)可以得到:

c)假設3:式(8)中的正實數(shù)δk滿足δk<k0。
2 控制器設計
考慮到傳感器信號含有噪聲,針對標稱受控對象,設計一階濾波PID 控制器。在此基礎上設計魯棒補償器,抑制等價干擾對閉環(huán)系統(tǒng)的影響。控制系統(tǒng)的結構框圖如圖2 所示。

圖2 基于信號補償?shù)聂敯艨刂葡到y(tǒng) Fig.2 Block Diagram of Robust Control System Based on Signal Compensation
圖2 中,GK為針對標稱受控對象設計的PID 控制器,有:

由此可得標稱系統(tǒng)閉環(huán)傳遞函數(shù)如下:

為抑制等價干擾q,期望魯棒補償器輸出為

由于v*中包含了輸出θy(t)的微分,在實際系統(tǒng)中不可實現(xiàn),故引入魯棒濾波器構成魯棒補償器如下:

式中F(s)為魯棒濾波器。為消除v*中的微分項,魯棒濾波器的相對階需大于或等于3。本文考慮如下所示的魯棒濾波器:

式中f 和g 為魯棒濾波器參數(shù),為正常數(shù)。若f 和g充分大,則魯棒濾波器帶寬足夠大,式(13)給定的補償信號v 充分接近式(12)給定的期望魯棒補償信號,從而充分抑制等價干擾q 的影響。由式(13)和(14),有:

本文設計的舵機角度跟蹤控制器為線性定常控制器,其階次由標稱控制器階次和舵機模型相對階確定。
對式(3)中受控對象,利用H∞方法,設計結果是保守的,利用μ綜合方法,所得控制器階次會很高。
3 魯棒特性分析
用θym(t)表示標稱閉環(huán)系統(tǒng)的輸出,則,

定義角度跟蹤誤差、誤差向量為

對于有界的θr,存在正實數(shù)χ 滿足不等式:

從式(8)及(18)可得:

定理:若假設1~3 成立,則由式(9)及(15)構成的控制器可實現(xiàn)魯棒角度跟蹤控制,即對任意給定的正實數(shù)ε,存在正實數(shù)f *與g*及t*,若f≥f*,g≥g*以及f>>g 時,則
若初始條件滿足Eθ(0)=0,則
證明:根據(jù)式(9)、(11)、(16)和(17)可得

式中eθ( s )為角度跟蹤誤差 eθ( t)的拉氏變換由式(20)可得:

式中Ai(i=1,2,…,5)是與誤差初始狀態(tài)有關的實數(shù),若誤差初始狀態(tài)為零,則Ai(i=1,2,…,5)亦為零。
式(14)可改寫為如下形式:

式中h 為任意給定的正實數(shù)。從式(18)可得:

其中
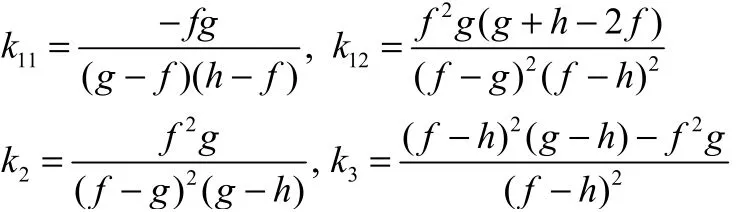
若f 與g 充分大且有f>> g>> h ,則|k11|、|k12|、|k2|和|k3|均小于一個與f、g 無關的正實數(shù),因此下式成立:

式中γ1為與f 與g 無關的正實數(shù)。此外,

式中γ2為獨立于f 與g 的正實數(shù)。因此有下式成立:

式中γ0=γ1γ2。
由式(21)及(25)可得:

相似地可以推導出:

綜上,可得:存在正實數(shù)γ,υ 使下式成立:

從式(6),(9)及(13)可得

由式(19)和(29)有:


因此,

由假設2 可知,存在正實數(shù)ρ 滿足如下不等式:

故有:

其中,

當g 充分大時,由式(28)和(34)有:

由式(21)、(25)、(34)及(36)可得:

從式(37)可知,對于給定的初始條件和任意給定的正實數(shù)ε,存在正實數(shù)f *與g*及t*,當f ≥ f*,g≥ g*以及f>> g時,若初始條件滿足Eθ(0)=0,則證畢。
注3:由上述分析也可給出魯棒濾波器參數(shù)整定過程:
a)取 g0> 0和 γ0≥ 1,令g = g0,γ = γ0, f= γg;
b)進行仿真或樣機實驗。若閉環(huán)控制特性滿足要求,則轉(zhuǎn)到d)步,否則,進行下一步;
c)增大g 的取值。若g 的值不是過大,轉(zhuǎn)到b)步,否則,令g = g0;增大γ 的取值。若γ 的值不是過大,轉(zhuǎn)到b)步,否則,進行下一步;
d)終止。
注4:當式(3)中的增益攝動?k的模充分小時,可設γ = 1,即f = g(參考文獻[8])。此時上述參數(shù)整定過程變得更為簡單,只要單調(diào)地增大g 的取值即可。
4 仿真及樣機實驗
下面從仿真和樣機實驗兩方面對舵機魯棒控制效果進行分析。實驗采用的舵機標稱參數(shù)如表1 所示。
4.1 仿真驗證
由表1 可得標稱受控對象的傳遞函數(shù)為

首先針對標稱受控對象設計標稱控制器:

此控制器相角余量大于50°,標稱閉環(huán)系統(tǒng)的帶寬大于200 rad/s,滿足舵機角度跟蹤控制的快速性要求。
再按式(14)設計魯棒補償器。其模型如圖3 所示。

圖3 控制系統(tǒng)的仿真模型 Fig.3 The Simulation Model Disgram of the Control System
根據(jù)注3,通過仿真實驗可以確定魯棒濾波器的參數(shù)取值。現(xiàn)選取兩組魯棒濾波器參數(shù)進行對比實驗,分別為f1=100,g1=20 和f2=300,g2=100。
為驗證魯棒控制器對負載力矩變化的抑制效果,進行如下仿真實驗。參考角度為2°階躍信號,0~0.4 s時間段空載運行,0.4 s 時在電機軸加0.03 N·m 的恒定負載力矩(相當于60%額定負載)。對兩組魯棒控制器及標稱控制器3 種情況進行了對比仿真,結果如圖4所示。
由圖4 可知,0~0.4 s 舵機空載運行時,3 種情況輸出曲線一致。在0.4 s 突加負載力矩時,均出現(xiàn)了不同程度的角度波動,其最大偏離誤差和恢復時間情況見表2。
由表2 仿真結果可知,標稱控制系統(tǒng)受到力矩干擾的影響最大,偏離的角度誤差較大并且恢復時間較長。而魯棒控制器控制的系統(tǒng)角度輸出只是在力矩變化瞬間出現(xiàn)輕微抖動,并很快恢復到了期望值。對比兩組濾波器參數(shù),發(fā)現(xiàn)f 和g 較大的一組對力矩擾動抑制效果更好。
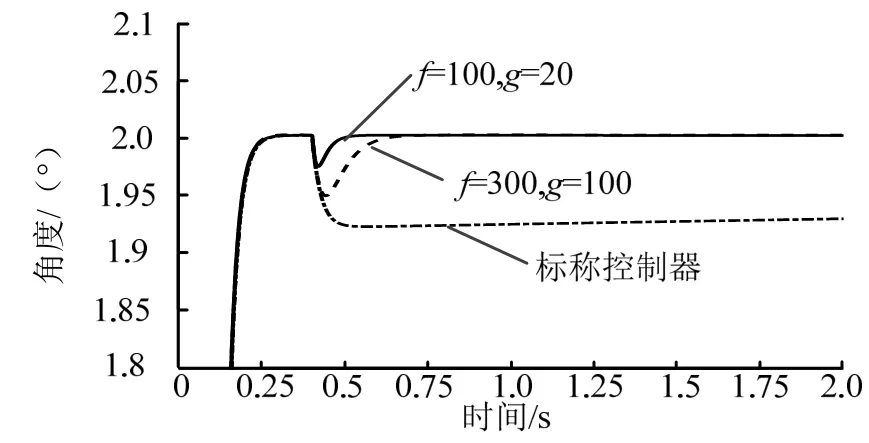
圖4 3 種情況下舵機輸出角度θy 對比曲線 Fig.4 Electric Actuator Output Curves θy for Three Cases

表2 仿真數(shù)據(jù)對比 Tab.2 Comparison of Simulation Datas
4.2 實驗驗證
采用舵機角度跟蹤控制系統(tǒng)樣機實驗平臺進行測試,以驗證魯棒補償控制的實際效果,控制器參數(shù)與仿真實驗相同。
4.2.1 負載力矩變化試驗
舵機處于零位穩(wěn)態(tài)時,分別對標稱控制器和魯棒控制器控制的系統(tǒng)突加額定單向恒定力矩,觀察角度輸出情況,測試曲線如圖5 所示。
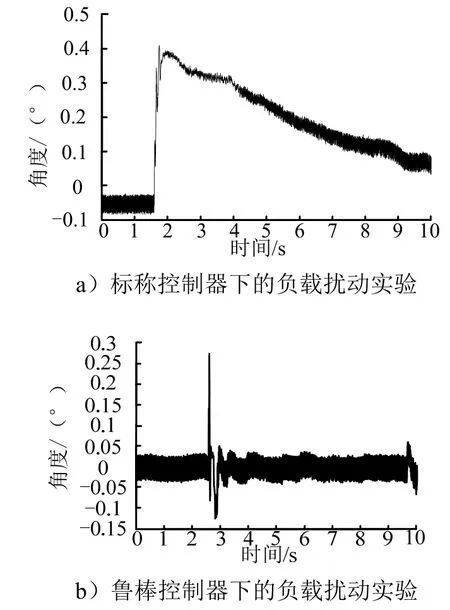
圖5 舵機穩(wěn)態(tài)負載擾動試驗 Fig.5 Load Disturbance Tests for Steady State
由圖5 可知,對于突加的力矩干擾,標稱控制器控制的系統(tǒng)產(chǎn)生了0.45°的角度誤差,在積分作用下需要一定的時間才能恢復到期望值。由于實際系統(tǒng)機械間隙,控制死區(qū)等因素其偏離角度絕對值大于仿真結果;而魯棒控制器控制的系統(tǒng)在受到力矩擾動后0.3 s 即恢復到了期望值并保持穩(wěn)定。表明魯棒補償?shù)目刂品椒軌蚝芎玫囊种屏財_動的影響。
4.2.2 恒定力矩試驗
對舵機施加單向額定負載力矩,參考角度信號為頻率1 Hz、幅值5°正弦信號,試驗曲線如圖6 所示。

圖6 恒定負載力矩對比試驗 Fig.6 Comparison Test of the Constant Load Torque
由圖6 可知,舵機系統(tǒng)在標稱控制器作用下其受恒定力矩方向存在約6%的輸出角度誤差,而帶有魯棒補償?shù)目刂葡到y(tǒng)在相同條件下輸出角度能夠很好的跟蹤角度指令信號。
4.2.3 高低溫環(huán)境測試
在特定場合,要求舵機產(chǎn)品適應-45~60 ℃的環(huán)境溫度。舵機機械阻尼及模型參數(shù)等會隨溫度變化而改變,用一組PID 參數(shù)控制難以保證全溫度范圍內(nèi)產(chǎn)品性能均滿足指標要求。下面在-45 ℃、60 ℃邊界溫度條件下進行舵機加載性能測試,指令為幅值2°的方波信號。實驗曲線如圖7 所示。
由圖7 可知,對于標稱控制器,低溫狀態(tài)下舵機在1.8 ~2°階段上升緩慢,大約0.15°角度誤差持續(xù)0.2 s;高溫狀態(tài)下舵機動態(tài)響應加快并出現(xiàn)了8%左右的超調(diào),很難適應全部溫度條件。增加魯棒補償后,有效抑制了由環(huán)境溫度變化引起的系統(tǒng)參數(shù)攝動及模型不確定性對系統(tǒng)動靜態(tài)性能的影響。
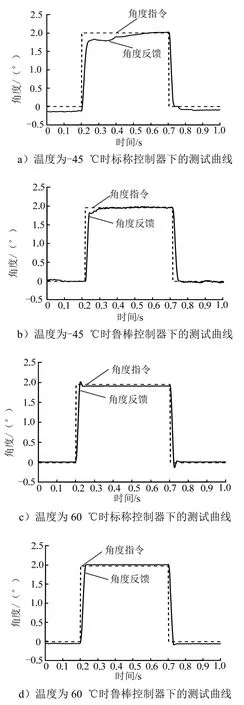
圖7 不同溫度下的對比試驗 Fig.7 Contrast Test for Different Temperatures
5 結束語
電動舵機的復雜工作環(huán)境使常規(guī)PID 控制方法對于參數(shù)不確定性及外部擾動產(chǎn)生的影響難以很好抑制。本文采用基于信號補償?shù)聂敯艨刂品椒ǎ瑢⒉淮_定性視為等價干擾,在標稱控制輸入的基礎上疊加一個魯棒補償信號,抑制了等價干擾,同時實現(xiàn)魯棒穩(wěn)定性和魯棒跟蹤。實驗和仿真表明了該方法的有效性。
