基于公共直流母線的小型挖泥船絞車變頻控制器設計
2019-12-23 05:30:58王國近
船電技術 2019年12期
王國近,余 俊
基于公共直流母線的小型挖泥船絞車變頻控制器設計
王國近,余 俊
(武漢船用電力推進裝置研究所,武漢 430074)
本文對負載變化時變頻直流母線系統的動態響應進行了分析。結合挖泥船實際絞車系統架構,將變頻控制器設計成帶制動單元的書本型多機傳動形式,對控制器進行了硬件選型和軟件設計實現。絞車運行時利用Starter對電機實時參數進行跟蹤監控,曲線分析表明,變頻控制器可實現“單手柄+雙橫移絞車”聯動操作,且控制效果具備快速性和精確性。
挖泥船 變頻器 直流母線共軌 橫移絞車聯動
0 引言
隨著我國經濟高速發展,沿江沿海港口建設如火如荼,疏浚設備需求量巨大,同時對疏浚設備的研發工作提出新挑戰。本文主要針對小型非自航、全電動、分體絞吸式挖泥船,主要用于江道河道的清淤疏浚,提高水道通行能力和河道灌溉能力等。挖泥船多絞車多工況施工操作,采用公共變頻直流母線技術實現多機傳動,可有效縮小驅動系統安裝空間,節約硬件成本,實用方便。
本文主要研究挖泥船絞車控制系統,主要包括單橋架絞車、左/右橫移雙絞車和左/右雙定位樁絞車,均由變頻電機驅動。該控制器設計采用公共變頻直流母線技術,實現同側橫移和定位樁絞車控制切換、橫移絞車單控和聯控模式切換等功能,既可縮小變頻柜整體尺寸,節約機艙空間,減小系統硬件成本。
1 公共直流母線技術概述
在多電機的傳動系統中,如果每臺電機單獨配置一個整流、逆變裝置,會造成資源的嚴重浪費,所以基于公共直流母線的多機傳動系統因其節能、維護量小、故障率低等優點收到設計者追捧。
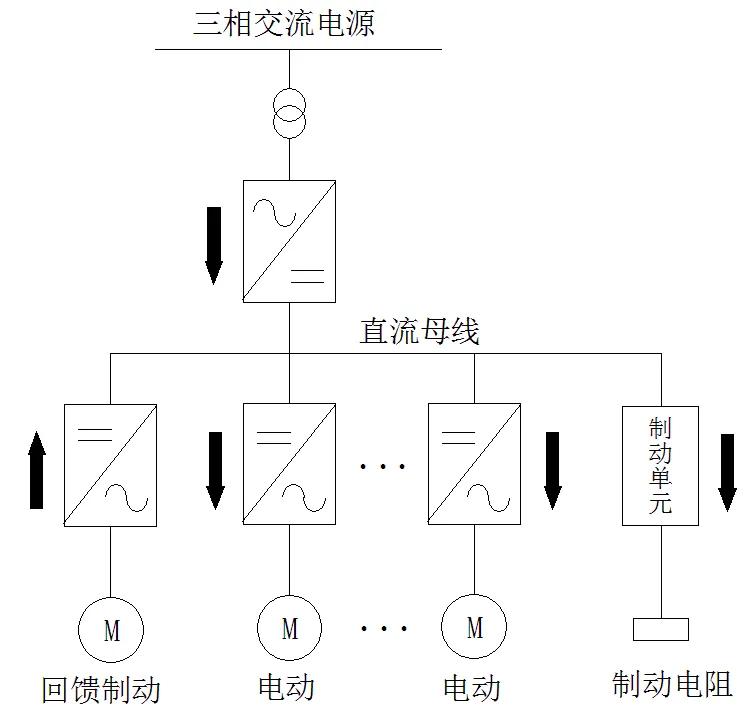
圖1 直流母線共軌系統示意圖
公共直流母線設計采用一套共用的整流裝置,為負載提供一定功率的直流電源,全部驅動電機的逆變器直接掛接在直流母線上,即多機共用一個整流器,該整流單元可以是不可逆變的,也可以是可逆變的[1]。前者多余能量通過外接制動電阻消耗掉,而后者可以充分地將母線上多余能量反饋到電網中,具有更好的節能、環保意義。
2 公共直流母線系統的動態響應分析
直流母線電壓是整流器作為局域負載電源裝置的直觀體現,而逆變器負載又通過直流母線向整流器獲取電能。因此,研究直流母線的動態響應首先要研究當逆變器負載變化時,能量的動態流向及整流器的響應變化情況。對于三相異步電動機而言,它的輸出功率與轉速、電磁轉矩之間的關系如式一:
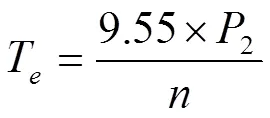

由式(1)可知,電機輸出功率與電機轉速、電磁轉矩成反比。對于恒轉速系統來講,最終的穩定狀態是轉速維持恒定,且電機電磁轉矩T等于負載轉矩T。
當電機負載轉矩T增加時,系統要求電磁轉矩T增加以平衡負載轉矩。由于逆變器輸出功率不能突變,電機調速系統會犧牲轉速以增加電磁轉矩T的輸出,因此電機負載轉矩T突增瞬間會造成轉速的降低[2,3]。
經過調節后,電機轉速維持恒定,輸出電磁轉矩T較負載增加前有所增大,可以看出逆變器必然從直流公共母線獲得更多有功功率。對于直流母線,母線電壓即為整流器輸出U。由于整流器輸出功率P不能突變且P=U×i,因此隨著輸出有功電流i的增加,母線電壓U會發生跌落。隨后控制電路會通過調節整流器開關量以增加有功電流i的輸出,外環直流電壓U也不斷增加,直流母線電壓U最后維持穩態,整流器動態響應過程完成。
電機負載轉矩減小時與負載轉矩增加時的動態響應恰好相反。
3 絞車變頻控制器設計
3.1 絞車控制系統架構
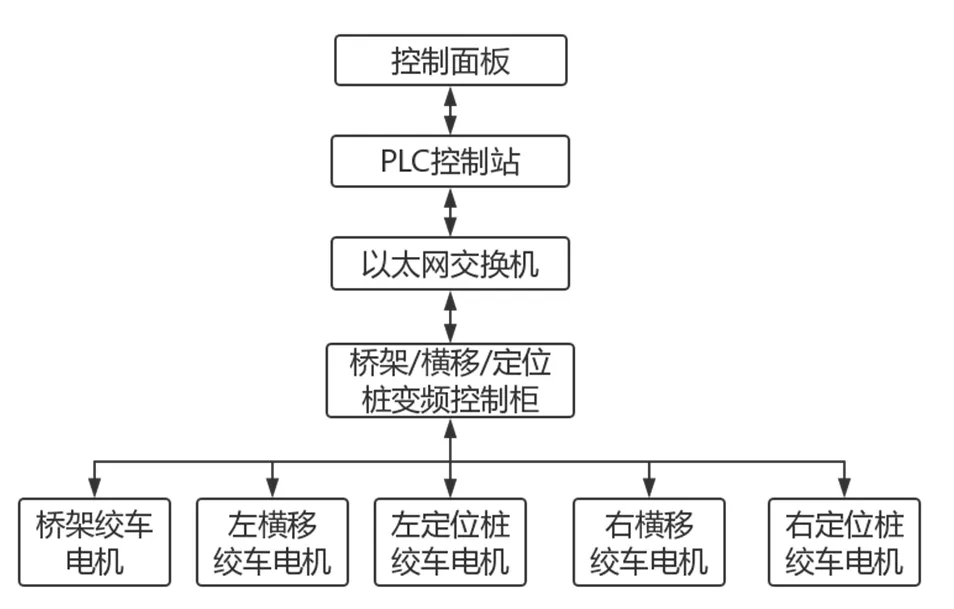
圖2 絞車控制系統結構圖
本文以200 m3/h(電動)分體絞吸式挖泥船為原型,設計了一套基于 PLC現場網絡總線的電機及變頻控制系統,控制系統結構如圖2所示。整個系統以 PLC1200為處理核心,通過PROFINET現場網絡總線實現了疏浚操縱臺對橫移絞車、橋架、定位樁的遙控操作及相關參數指示和報警功能。
對于絞車變頻控制系統,PLC控制站與變頻控制器通訊正常情況下,面板控制指令可以順利傳輸至CU320控制單元。對于SINAMIC傳動系統,可以使用STARTER軟件進行設計和調試。調試時變頻器控制程序中電機參數與實際所驅動的電機一致,通過此軟件進行靜態辨識、旋轉測量和控制器優化等一系列整定后[4,5],變頻控制器可以分別驅動單個電機運行。
對于挖泥船類工程船舶,單控電機是不能滿足施工需求的,橫移絞車系統必須具備聯動控制模式,即通過同一轉速手柄指令實現同時控制左右橫移兩臺絞車運行。聯動模式下,橫移絞車運動狀態為左放右收或左收右放。
要實現橫移絞車聯動運轉,橫移電機需安裝配套絕對值編碼器和增量編碼器。絕對值編碼器實時反饋絞車卷筒當前絞纜直徑,用以計算卷筒轉動線速度。增量編碼器實時反饋絞車電機當前轉速,形成控制閉環。變頻控制器綜合手柄設定轉速、聯動補償轉速和編碼器反饋轉速,通過PI控制器有效控制,輸出實際轉速指令至左右橫移電機,實現左右橫移電機達到聯動理想狀態,即挖泥船在聯動模式下呈扇形回轉,同時橫移纜繩始終處于繃緊狀態[6]。
3.2 變頻控制器硬件配置選型
絞車變頻控制器設計時,認定橋架、橫移和定位樁絞車采用同型號拖動電機,電機具體參數如表1所示:

表1 電機參數
絞車電機額定功率為30 kW,逆變模塊額定功率為32 kW,直流母線掛接三個逆變模塊,整流單元額定功率選定為100 kW。左右橫移兩臺電機分別反饋絕對值編碼器信號和增量編碼器信號,共需要四個編碼器信號接收模塊。
根據絞車電機配置,采用西門子SINAMIC S120系列變頻器,配套控制單元等硬件配置如表2所示。
制動單元選型需要計算絞車變頻控制系統的制動能量[7,8],具體計算方法如下:
總轉動慣量為40 kgm2的負載有740 rpm減速到靜止,計算其制動額定功率。電機及驅動:30 kW;電動機額定轉矩:382 N·m;重復周期時間:30 s;最大減速發生在電動機額定轉矩的150%。
最大電機轉矩Mmax:

最快的減速時間T:
計算此時需要的制動轉矩M:

制動功率P:

由于項目包含三個逆變單元,綜合考慮選取制動單元功率選取100 kW。
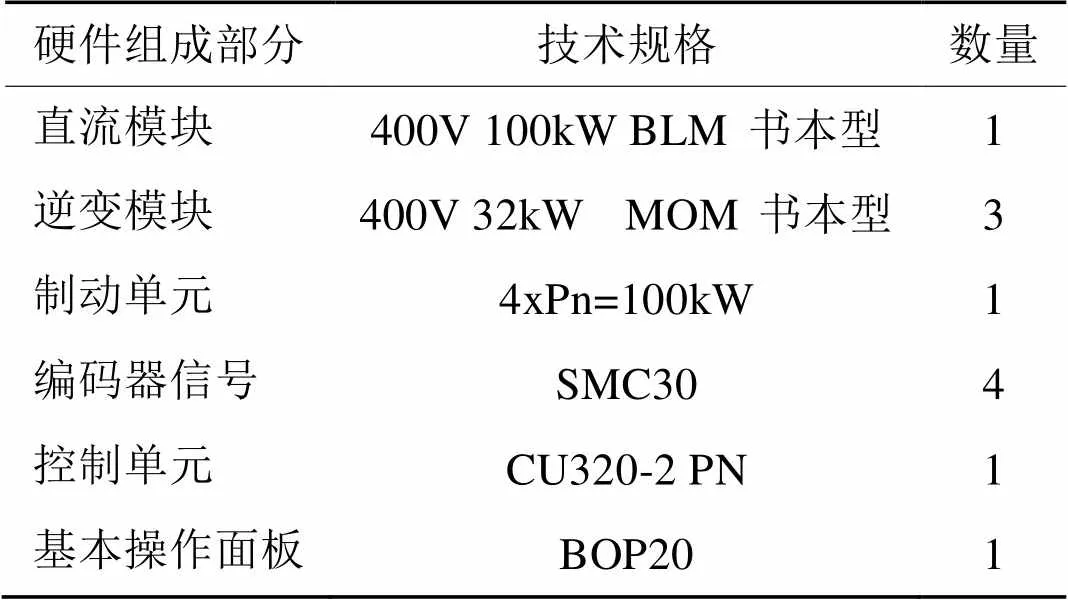
表2 變頻控制系統基本硬件配置
3.3 變頻控制器軟件設計
橫移絞車聯動控制中,最重要的部分是聯動速度補償控制器和PI轉速控制器設計[9]。
聯動速度補償控制器是通過采集張緊力完成信號、聯動指令信號和電機實時轉矩信號,通過PIC控制運算,輸出速度補償,聯動速度補償程序如圖3所示。速度補償是控制系統根據電機當前轉矩進行轉速調節的重要方式,是實現卷筒轉動過程中纜繩保持一定張力的重要手段。其中,電機轉矩限制設置為額定轉矩382 N·m,橫移聯動收纜側電機轉矩保持在230 N·m以下,放纜側電機轉矩在70 N·m上下波動。
PI轉速控制器輸入端為轉速設定值和轉速反饋值的偏差,輸出為轉速控制量,通過不斷優化控制參數“P gain”和“reset time”,從而實現電機轉速有效調節,橫移聯動才可達到左放右收或左收右放的默契配合,如圖4所示。
4 橫移絞車變頻系統驅動效果
為測試橫移電機聯動控制效果,可利用Starter-trace進行曲線跟蹤。曲線跟蹤分別選取左右橫移電機四個參數值[12],包括電機轉矩值(r80)、電機速度設定值(r62)、電機編碼器反饋值(r61)和電機速度補償值(r21503)。
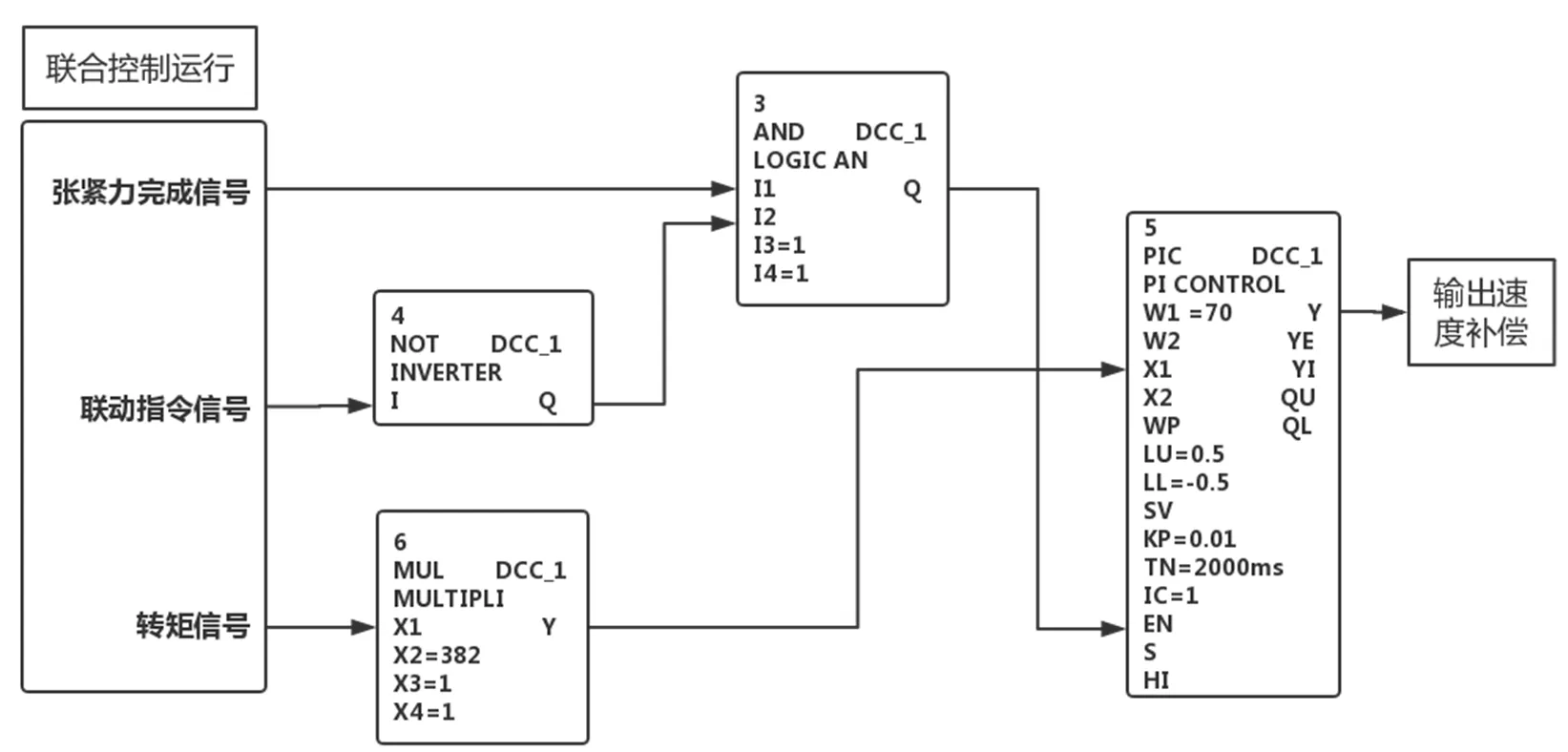
圖3 橫移絞車聯動速度補償器
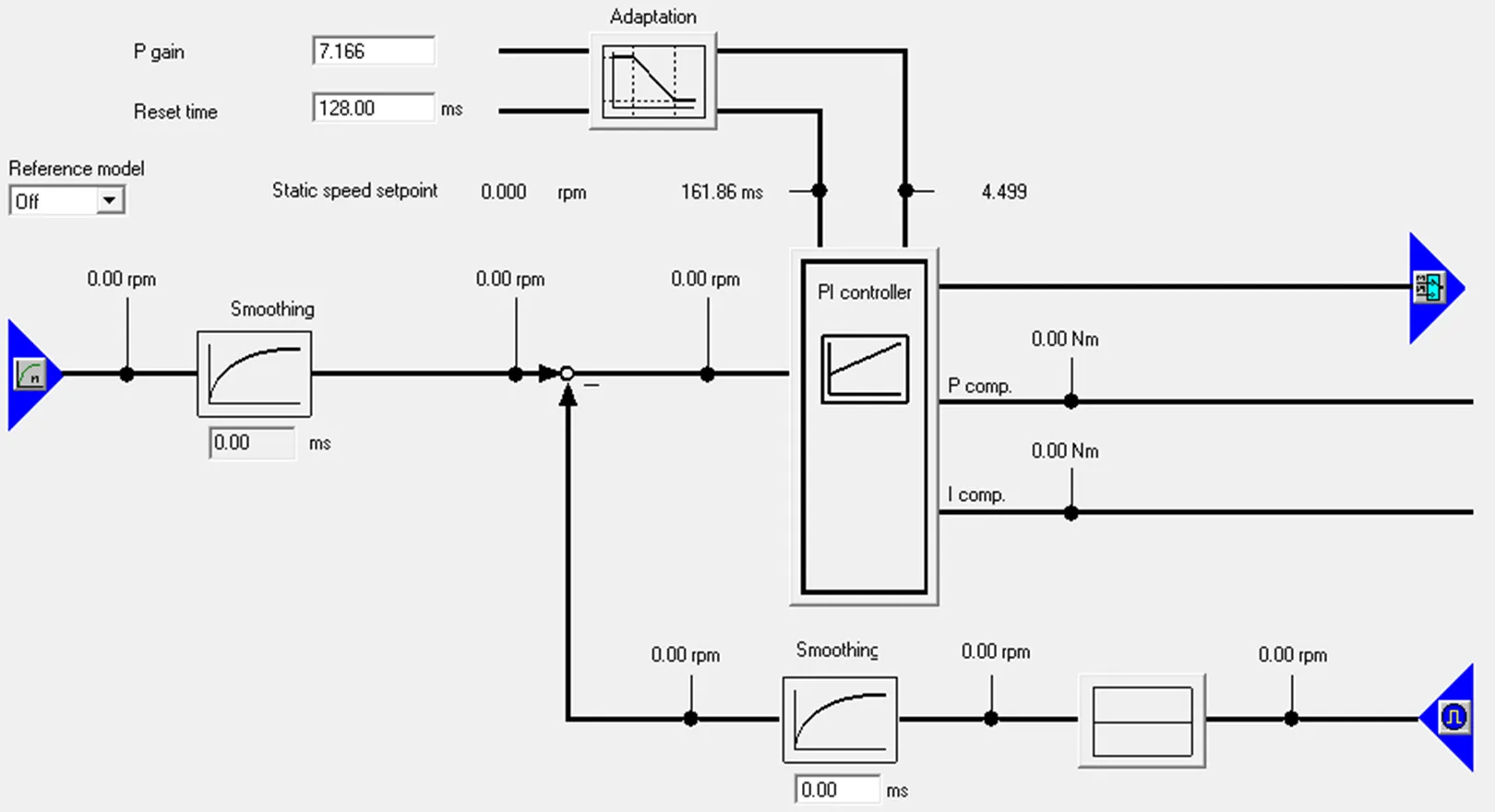
圖4 橫移絞車轉速PI控制器
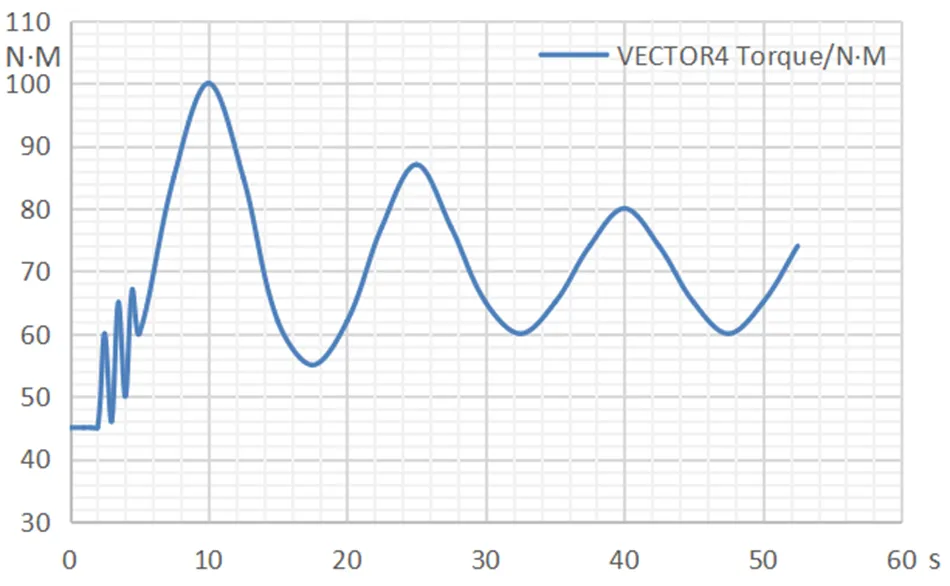
圖5 橫移聯動放纜側VECTOR4電機轉矩曲線
橫移聯動發生后,試驗曲線圖顯示如圖5、6所示,駕控臺轉速手柄輸出轉速指令,收纜電機VECTOR5轉矩由75 N·m在10s內快速上升至230 N·m,最后轉矩穩定在170~210 N·m之間輕微波動起伏;放纜電機VECTOR4轉矩由46 N·m在10 s內快速上升至100 N·m,隨后穩定在70 N·m附近,整個調節過程就是橫移聯動收纜側和放纜側轉矩變化的過程。

圖6 橫移聯動收纜側VECTOR5電機轉矩曲線
由曲線圖7、8分析可知,左右橫移電機轉速設定值和相應編碼器反饋值一致,說明控制系統中編碼器反饋回路正常。橫移聯動模式開始后,收纜側電機轉速到達設定值后是保持不變,但是由于放纜側電機VECTOR4存在轉速補償,其轉速設定值隨著電機轉矩的波動出現上下起伏。同時,曲線圖8顯示收纜側電機VECTOR5不存在轉速補償。
同時對比圖7和圖8,可以看出速度補償曲線和速度設定值曲線趨勢相同,且橫移聯動時通過放纜側VECTOR4電機速度控制實現了左右電機聯動,同時放纜側VECTOR4電機扭矩保持70 N·m左右。
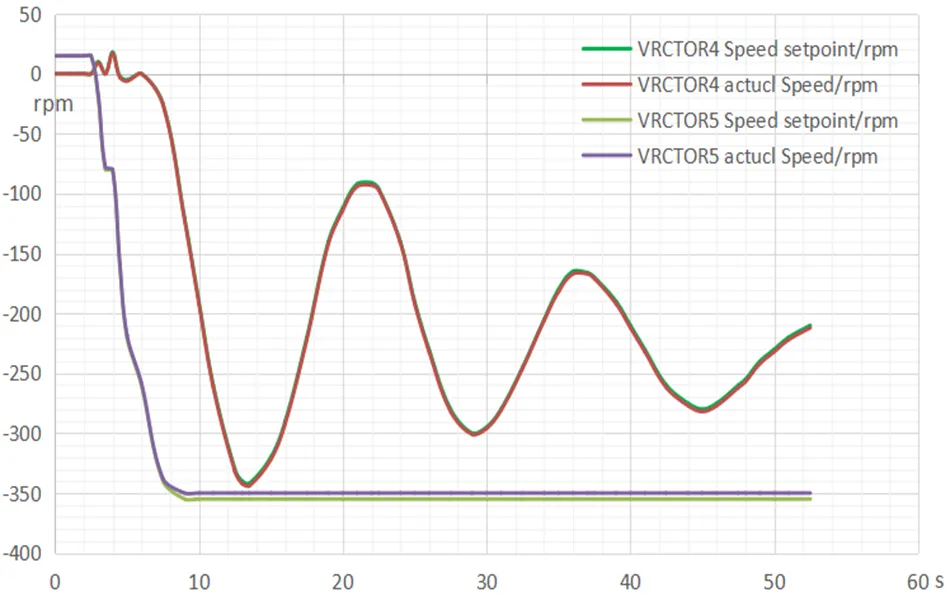
圖7 電機轉速設定和反饋曲線圖
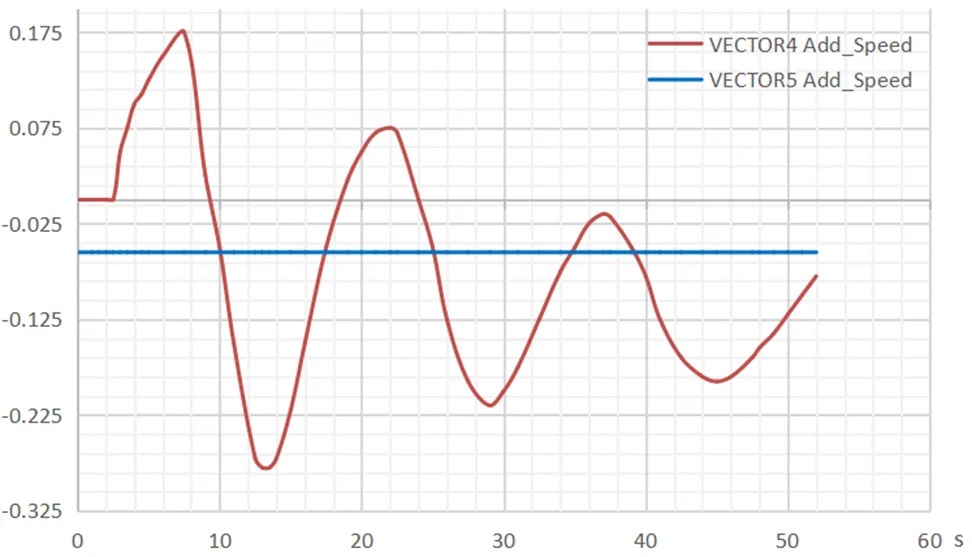
圖8 電機速度補償曲線圖
5 總結
本文針對挖泥船絞車實際操作工況,提出運用共直流母線技術設計挖泥船絞車變頻控制系統,采用帶制動單元的書本型多機傳動形式,分別對變頻控制器進行硬件選型和軟件程序編寫,重點實現了橫移絞車“單手柄+雙橫移絞車”的聯動操作功能。絞車變頻控制系統實際應用后,對電機參數進行實時監控,分析電機參數曲線結果表明,設計完成的控制器控制效果良好,手柄轉速指令、速度補償值和絞車實際轉速運行軌跡能夠進行有效匹配。文中關于挖泥船絞車變頻控制器的設計具有一定的研究意義和應用價值。
[1] 陳丹. 直流母線下多逆變器負載局域電力系統的研究[D]. 大連: 大連海事大學,電力電子與電力傳動, 2010, 6.
[2] 李生軍. 能力回饋型異步電動機加載測試系統的研究[D]. 大連: 大連交通大學, 電機及其驅動控制, 2013,6.
[3] 谷孝利. 基于變頻技術的大型絞吸式挖泥船電力驅動控制系統研究[D]. 上海: 上海交通大學, 電氣工程, 2011, 12.
[4] 韓龍. 全電力驅動挖泥船電機系統設計研究[D]. 上海: 上海交通大學, 電氣工程, 2013. 1.
[5] 吳磊. 錨絞機智能控制系統設計研究[D]. 南京: 江蘇科技大學, 控制工程, 2013. 6.
[6] 谷孝利, 楊啟, 張國安. “長獅9”自航絞吸挖泥船電力系統設計[J]. 造船技術, 2015(1): 9-12.
[7] 陳夢. 大型絞吸挖泥船電力驅動系統研究[D]. 上海: 上海交通大學, 電氣工程, 2013. 2.
[8] A. A. Shavelkin. Analysis of feasibility of asymmetrical cascade multilevel frequency converters [J]. Russian Electrical Engineering. 2018.9: 502-507.
[9] D. V. Krasnow. Control of asynchronous geared motors by means of frequency converters [J]. Metallurgist. 2018.9: 502-507.
[10] 范嘯萍. 現代電力推進船舶電網諧波分析及抑制方法研究[D]. 上海: 上海交通大學, 電氣工程, 2011.
[11] Hodge C G, Mattick D J, Flower J O. Novel Converters for Electric Ship Propulsion System and Shipboard Power Distribution [J]. IEEE Conference Record of Power Modulator Symposium, 2016: 89-96.
[12] 陳大卓. 礦井提升機雙PWM變頻調速系統研究[D]. 上海: 上海交通大學, 控制工程, 2009.
Design of Controller for Inverter of Winches on Small Dredger Based on the Common DC Bus Technology
Wang Guojin, Yu Jun
(Wuhan Haiwang Mechanical and Electronic Engineering Company, Wuhan 430074, China)
U674.31; TM921
A
1003-4862(2019)12-0034-05
2019-06-04
王國近(1989-),男,工程師。主要研究方向:船舶系統控制。E-mail: frankok2008@163.com