月面低空飛行器著陸緩沖機構設計與仿真分析
2019-12-24 07:32:58董小閔李軍禮于建強潘成望
載人航天 2019年6期
關鍵詞:設計
董小閔,李軍禮,于建強,潘成望,林 輕
(1.重慶大學機械工程學院,重慶400044;2.上海宇航系統工程研究所,上海201108)
1 引言
月面飛行器著陸時會承受巨大的沖擊載荷,為保證著陸器安全著陸,需采用緩沖機構吸收并耗散能量[1-2]。緩沖器是著陸器緩沖機構的核心,用于吸收著陸器在著陸沖擊過程中所產生的沖擊能量。國際上常用的緩沖器主要有液壓/氣壓緩沖裝置。可壓縮吸能緩沖裝置、機械式彈簧緩沖裝置。磁流變及電磁阻尼緩沖裝置。磁流變緩沖器具有體積小、阻尼力在較大范圍內連續可調、緩沖完成后可完全恢復即可重復使用等優勢,可用于著陸緩沖器,以降低月球及深空探測任務成本、提高發射頻率[3-4]。
迄今為止,國內外研究機構對月面著陸緩沖裝置進行了大量研究[5]。美國的勘測者(Surveyor)探測器采用液壓阻尼來實現緩沖,阿波羅(A-pollo)登月艙和蘇聯的部分月球(Luna)探測器分別采用蜂窩鋁材料變形和金屬材料變形來實現緩沖[6]。目前磁流變緩沖器的設計已趨于成熟,將磁流變緩沖器應用到月球著陸器緩沖機構上具有理論上的可行性[7-8],但研究重點多在于磁流變緩沖器本身的設計、控制與性能驗證,而對月面飛行器一些新的需求(如月面行駛時的越障緩沖)尚少有分析和回應。
本文參考著陸緩沖機構設計方法[9-10],針對月面飛行器對緩沖機構兼顧著陸與越障緩沖的需求,提出一種將輪式移動機構與磁流變緩沖器相結合的新型緩沖機構方案。
2 緩沖機構設計
2.1 設計對象
根據月面大范圍機動系統總體方案研究技術指標要求,低空飛行器結構總體包絡尺寸為:Φ2500 mm×6000 mm,飛行器總體質量1200 kg(包含著陸緩沖系統),乘載2人共300 kg,著陸緩沖機構質量80 kg,人員沖擊加速度最大過載5g。
針對月面探測任務需求設計的低空飛行器為四腿構型,4個緩沖支腿沿飛行器對稱分布。結構布局如圖1所示。
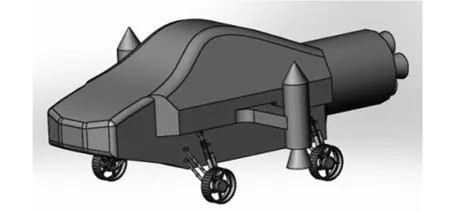
圖1 低空飛行器結構Fig.1 Structure of low-altitude aircraft
2.2 總體方案
緩沖機構設計如圖2所示,包括1只主緩沖器和4只輔助緩沖器,均采用閥式磁流變阻尼器。長度可調的輔助支撐機構主要用于車輪的固定和收放。同側的2個輔助支撐內部磁流變液通過管道相互連通,一個輔助支撐內部的流出和流入管道與另一個輔助支撐內部的流入和流出管道交叉連通,磁流變液流經管道中間的閥式磁流變阻尼器時會產生一定的阻尼力。
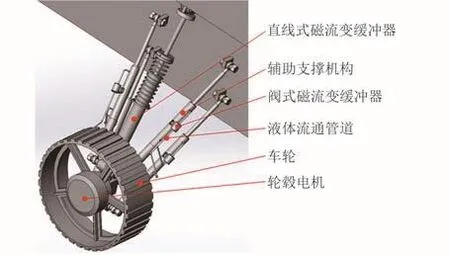
圖2 緩沖機構圖Fig.2 Diagram of landing gear
2.3 詳細設計
磁流變緩沖器的主要緩沖元件為彈簧和磁流變阻尼器,其中彈簧提供恢復力,磁流變阻尼器提供阻尼力,通過控制電流強度來控制線圈的磁場強度,從而控制阻尼器的阻尼系數,實現緩沖力大小的調節。其具體結構如圖3、4所示。

圖3 主緩沖器結構Fig.3 Structure of main shock absorber

圖4 輔助支撐機構結構Fig.4 Structure of auxiliary support mechanism
在主緩沖器的外筒上固定了一個彈簧,在彈簧的上端固定端蓋,著陸緩沖完成后機體與該端蓋由銷釘固連在一起,這時彈簧能起到支撐作用,飛行器再次起飛時固連狀態解除,緩沖機構靠自身重力恢復到著陸緩沖初始狀態,能夠再次地著陸緩沖,實現了緩沖機構的可重復使用。輔緩沖器通過連桿帶動外筒內活塞左右滑動,使得外筒內磁流變液在閥式阻尼器之間流通,從而產生阻尼力,起到緩沖并耗散部分沖擊能量的作用。
要得到磁流變緩沖器具體結構參數需對主緩沖機構及輔助支撐機構所需的最大阻尼力進行計算。按著陸緩沖過程中所承受的極限加速度a=5g,由F-mg=ma得到著陸器承受的最大載荷為75 950 N,從而計算出1/4緩沖機構的極限載荷。本設計采用的展開角度為27°,主輔緩沖器平面夾角為20°,由空間幾何關系,經過計算,得到主緩沖器力值F約為12 000 N,輔助緩沖器力值Ff約 3000 N。
磁流變緩沖器的設計采用Bingham塑性模型(Bingham Plastic,BP),基于BP模型計算緩沖器的輸出阻尼力表達如式(1)所示[11]:
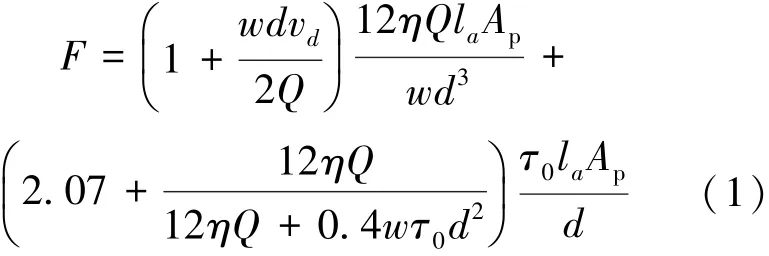
其中,F為阻尼器的最大阻尼力;η為磁流變液的黏度;Q為流經工作間隙的液體流量;Ap為活塞截面積;w為平板模型寬度;vd為磁流變液流經間隙d的速度;τ0為磁流變液剪切屈服應力。
基于式(1),選取決定磁流變緩沖器的工作區域的關鍵幾何尺寸,包括激活區域間隙、活塞有效長度、線圈深度和線圈處間隙作為優化變量,根據磁流變緩沖器的活塞桿與活塞的裝配尺寸設計約束條件,將阻尼器需提供的最大阻尼力值作為目標函數,利用modeFRONTIER結合ANSYS和MATLAB對磁流變緩沖器進行參數優化,可以得到作為優化結果的關鍵尺寸見表1。
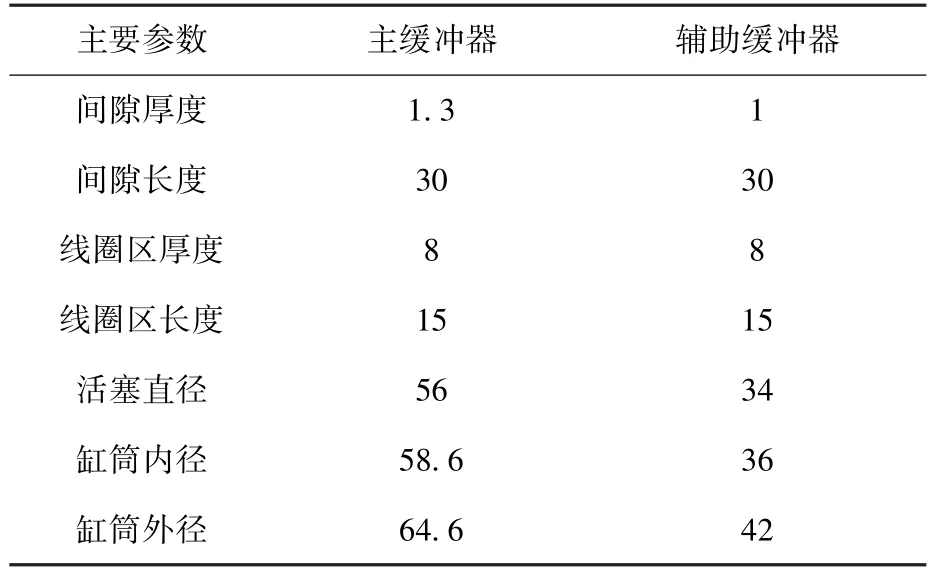
表1 緩沖器尺寸參數Table 1 Key size parameters of buffer /mm
3 仿真驗證
3.1 仿真模型
基于虛擬樣機分析軟件ADAMS環境,建立著陸緩沖機構仿真模型如圖5。
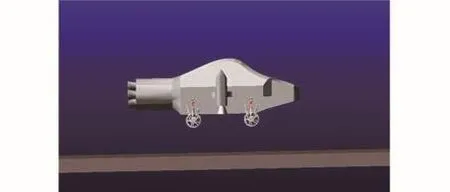
圖5 著陸緩沖機構仿真模型Fig.5 Simulation model of landing gear mechanism
在處理著陸器車輪與月壤的接觸問題時,將作用力分為法向力和摩擦力,在描述月壤的塑性特征時,結合其表面承載力、彈性系數和阻尼系數等特性對月壤進行了表征,相關參數參考了阿波羅登月艙和探測者系列著陸器著陸仿真所采用的月壤力學性質的描述[12-13]。
3.2 軟著陸分析
為驗證本文提出的用于月面低空飛行器的著陸緩沖機構在著陸過程的緩沖性能,進行軟著陸分析。根據阿波羅載人登月艙豎直速度約為1~3 m/s,著陸工況選為:豎直初始速度為1 m/s,距月面高度為1 m,主、輔助緩沖器仿真模型阻尼單元的阻尼系數分別為4000 Ns/m和1000 Ns/m。
仿真得到低空飛行器軟著陸時的機體質心加速度時間歷程如圖6所示,最大值約為3.32g,有效地降低了沖擊載荷,滿足最大沖擊加速度不超過5g的設計要求。

圖6 機體質心加速度幅值Fig.6 Amplitude of body centroid acceleration
不同阻尼系數緩沖過程主緩沖器的阻尼力如圖7所示,從圖形包絡面積可以看出主緩沖器器耗能可調,且在阻尼系數為4000 Ns/m時,可充分利用其有效行程,緩沖器耗能面積較大,具有較好的緩沖性能。

圖7 不同阻尼系數時緩沖過程主緩沖器力值Fig.7 Main buffer force value with different damping coefficients during buffering
3.3 越障分析
為了驗證著陸緩沖機構在復雜月面路況環境開展移動探測時緩沖機構的緩沖性能,進行了越障分析。越障工況為在月球表面跨越凸形障礙、凹形障礙和坡度障礙。參考玉兔二號數據,低空飛行器運動速度設為 0.1 m/s、0.3 m/s和0.5 m/s,設置凸形障礙、凹形障礙和坡度障礙(最大坡度20°)。與軟著陸相比,越障時對緩沖機構的極限性能要求較低,因此在此工況下,主、輔助緩沖器仿真模型阻尼單元的阻尼系數可調為2000 Ns/m和500 Ns/m。
仿真可得越障時機體質心加速度時間歷程如圖8~圖10所示。可以看出,不同速度下的機體質心加速度幅值的前后兩個峰值分別是月面低空飛行器前后輪跨越障礙的時刻,表示所設計月面低空飛行器能成功越障,實現了月面行駛的功能。而且在不同的越障工況下,隨著運動速度的增加,機體質心加速度值有所增加,但3種工況下的機體質心加速度最大值約為1.25g,遠小于極限加速度,說明月面低空飛行器在復雜月表越障行駛時緩沖機構能夠發揮較好的緩沖隔振作用。
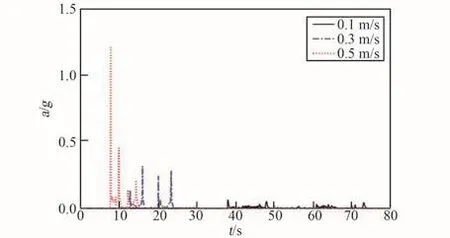
圖8 跨過凸形障礙時的機體質心加速度幅值Fig.8 Amplitude of body centroid acceleration when crossing convex obstacle
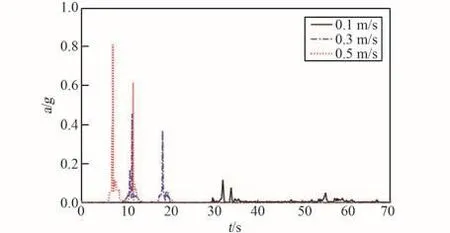
圖9 跨過凹形障礙時的機體質心加速度幅值Fig.9 Amplitude of body centroid acceleration when crossing concave obstacle
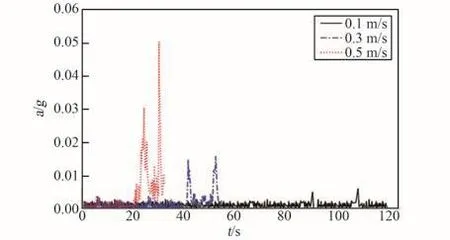
圖10 跨過坡度障礙時的機體質心加速度幅值Fig.10 Amplitude of body centroid acceleration when crossing slope obstacle
4 結論
1)設計新型緩沖機構將月球車輪式移動機構與磁流變緩沖器相結合,實現了著陸緩沖機構和月面飛行器移動機構的一體化;
2)著陸時,飛行器極限加速度載荷約為3.32g,不超過最大沖擊加速度5g,可有效地降低沖擊載荷,具有較好的著陸緩沖性能;且其耗能可調,通過在障礙路況移動探測時調節阻尼,可有效提高移動探測過程的穩定性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04