基于模糊PID控制的海洋絞車排纜系統
2019-12-25 03:05:00黃良沛常進杰鄒東升
船舶與海洋工程 2019年6期
關鍵詞:系統
黃良沛,常進杰,鄒東升,寇 煜
(湖南科技大學 a. 機械設備健康維護湖南省重點實驗室;b. 先進礦山裝備教育部工程研究中心,湖南 湘潭 411201)
0 引 言
海洋絞車是水面支持系統中的關鍵機械裝備之一[1],在作業過程中易受風浪、潮涌等多種因素的影響,工況非常復雜,特別是在深海作業時因卷筒直徑較大、纜繩纏繞層數較多,容易出現纜繩亂卷和相互擠壓等狀況,而排纜的好壞直接影響纜繩的使用壽命和海洋絞車的使用性能[2-3]。為保證海洋絞車在作業時其纜繩能整齊有序地排列在卷筒上,解決排纜機構和卷筒的同步運動問題是關鍵。交流變頻電機驅動排纜通過變頻器調整電機的轉速和旋向,使排纜裝置與絞車主運動相協調,具有響應速度快、成本低和調速性能好等優點,應用廣泛,本文所述排纜系統即為變頻電機驅動系統[4]。在電控式排纜系統中,排纜效果的好壞取決于排纜控制器的算法,目前主要采用PID(Proportion-Integral-Derivative)算法。常規PID具有算法簡單、魯棒性好和可靠性高等特點,但其對具有時變性、非線性和變量多的復雜系統的控制效果較差。絞車在作業時受浮力、波浪和海流等因素的影響,排纜傳動機構上的負載力會發生不規則變化;交流電機和變頻器等電器元件受工作環境的影響,系統參數會發生變化。這些因素導致控制器的被控對象無法準確建立,參數設置較為困難。模糊PID控制器可較好地解決該問題,模糊控制理論可將不易定量的條件以模糊集的形式表示出來,運用模糊推理的方法實現 PID參數Kp、Ki和Kd的在線自整定。將模糊控制規則與常規PID相結合,不僅能保持常規PID控制系統原理簡單、使用方便和魯棒性強的優點,而且具有更強的靈活性和整定性,控制精度更高[5-6]。
1 排纜機構系統組成及工作原理
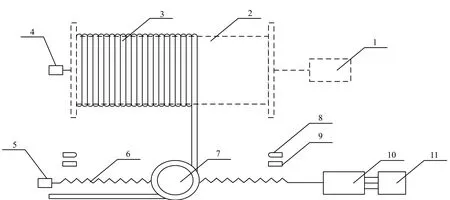
圖1 海洋絞車單向絲杠排纜機構系統構成
海洋絞車單向絲杠排纜機構系統構成見圖1,該系統主要由交流變頻電機、蝸輪蝸桿減速器、單向絲杠、導纜輪、卷筒編碼器、絲杠編碼器和行程開關等組成。為防止行程開關失效,不能及時使電機反轉而出現危險,在每端設置2個行程開關(終端保護)來保證設備正常運行。排纜絲杠由變頻電機驅動,通過絲杠的旋轉使導向輪在水平方向上左右移動。為確保導向輪的安全工作區域不受干擾,排纜絲杠的兩端安裝有行程開關,其間距與卷筒工作長度相同。絞車作業時,卷筒按輸入指令的速度和方向收放纜繩,繞有纜繩的導向輪在絲杠的帶動下按響應的速度和方向水平移動,使纜繩整齊地排列在卷筒上,當碰觸到行程開關時,電機帶動絲杠反轉,從而實現自動換向。絞車排纜系統實時跟蹤主傳動系統的運動,卷筒每旋轉1周,卷筒上的纜繩減少或增加1圈,絲杠帶動的導向輪在水平方向上向左或向右平移的距離必須等于1個纜繩直徑的長度[7]。
2 排纜系統建模
2.1 三相異步電機矢量控制系統
該排纜系統采用異步電機驅動,采用矢量控制的方法對電機進行動態解耦,使其保持等效直流調速系統的良好性能。圖2為SVPWM的異步電機矢量控制系統結構圖,其中:AΨR為轉子磁鏈調節器;ASR為轉速調節器;ACMR為定子電流勵磁分量;ACTR為定子電流轉矩分量調節器;FBS為轉速傳感器。該系統為雙閉環控制結構,內環為電流環,外環為轉子磁鏈和轉速環[8]。系統電流傳感器將采集的三相電流iA、iB和iC經過Clarke和Park變換轉化為與轉子磁場同步的兩相坐標系上的電流isM和isT,結合FBS測得的電機轉速w計算得到電機磁通ψr,兩者作為外環反饋,通過轉速調節器和磁通調節器調解輸出修正之后的控制信號為電流環的反饋,經過電流調節器調節輸出同步旋轉坐標系下的電壓分量對電壓分量進行Park逆變換轉化為兩相靜坐標系上的電壓分量輸入SVPWM,利用SVPWM技術控制逆變器輸出三相電壓,從而控制電機的轉速。
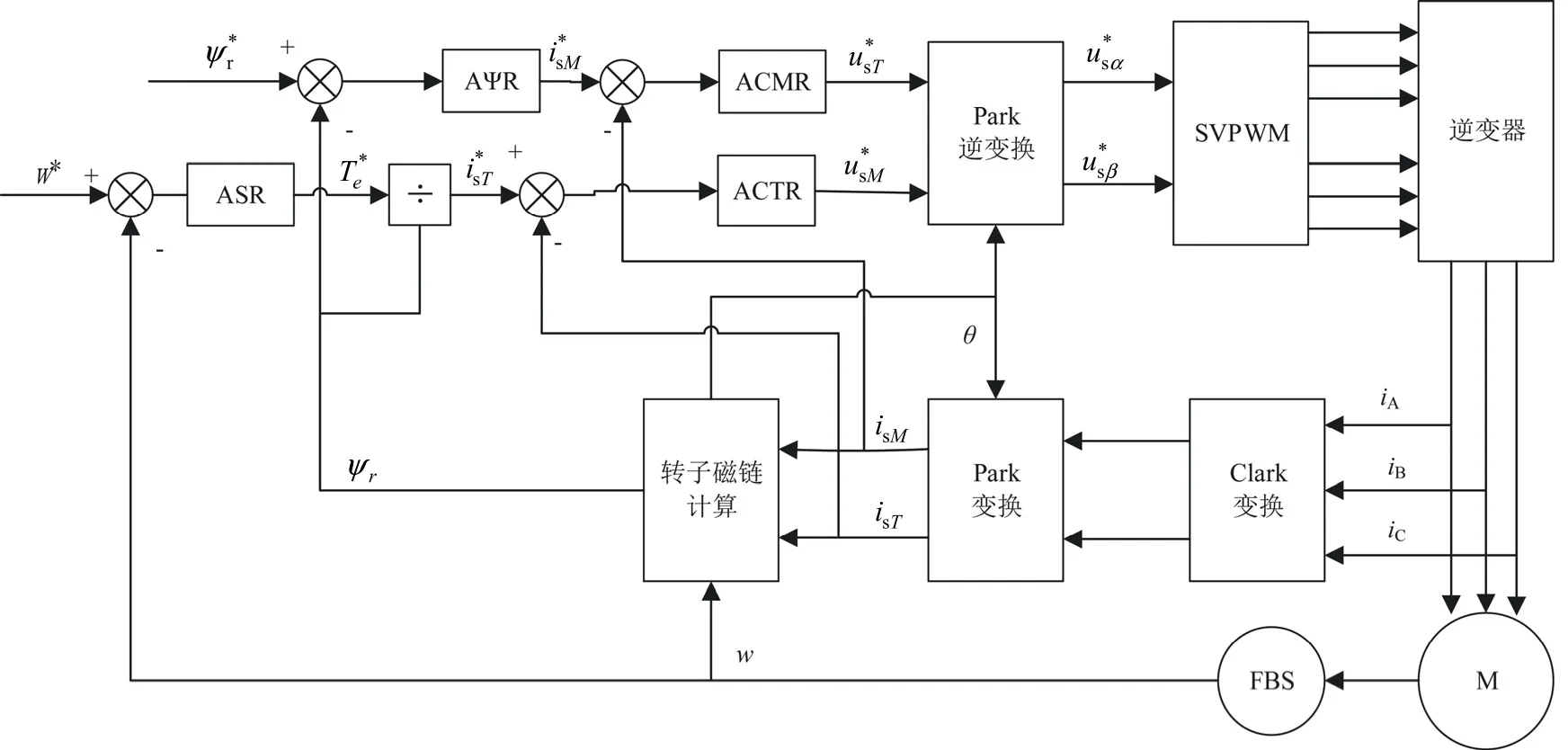
圖2 SVPWM的異步電機矢量控制系統結構圖
該矢量控制系統的仿真模型采用轉子磁場定向,因此轉子磁鏈計算的關鍵是將定子電流解耦為與轉子磁鏈rψ相關的電流勵磁分量isM和轉矩分量isT。在M-T旋轉坐標系上計算轉子磁鏈,有

由于在仿真開始時t=0,ψr=0,式(1)分母為零,造成仿真錯誤,因此將式(1)改為

在M-T旋轉坐標系中,電磁轉矩的表達式為

式(1)~式(3)中:Tr為轉子電磁時間常數;Lm為定子與轉子互感;Lr為轉子自感;np為異步電機極對數;rψ為轉子磁鏈;w1為定子同步角頻率;w為轉子角頻率。
2.2 排纜系統機械傳動機構模型
排纜系統的機械傳動結構包括蝸輪蝸桿減速器、絲杠、絲杠螺母、導軌和導向輪等部件,是將電機的旋轉運動轉化為導向輪的水平運動的整個機械傳動鏈。為保證排纜系統的跟隨精度、動態性能和靜態性能,要求系統具有摩擦阻力較小、傳動剛度較大和傳動間隙較小等特點。因此,排纜機械裝置的剛度較大,變形較小,根據機械動力學原理將其簡化為剛性傳動系統[9-10],排纜系統傳動裝置簡圖見圖3。
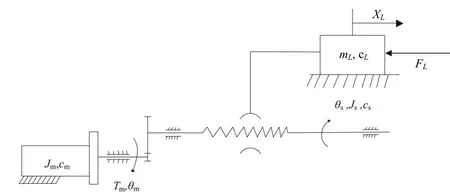
圖3 排纜系統傳動裝置簡圖

根據機械動力學原理得出電機軸和絲杠軸的運動方程為式(4)中:Tm、T2和TL分別為電機輸出轉矩、絲杠驅動轉矩和負載轉矩;Jm和Js分別為電機轉子和絲杠的轉動慣量;cm、cs和cL分別為電機、絲杠和平動機構的阻尼系數;θm為電機的角位移;θs為絲杠的角位移;mL為平動機構的質量;T2=iT1;TL=FL P h/2π。
將式(4)拉式變換以電機輸出轉矩Tm為系統輸入,以絲杠的角位移θs為輸出,以TL為擾動輸入,在TL為零的情況下得出Tm與θs的傳遞函數G(s)為

式(5)中:J為機構轉動慣量折算到絲杠軸后的總轉動慣量;c為將機構黏性阻尼折算到絲杠軸后總黏性系數。
3 模糊自適應PID控制器設計
排纜機構控制方式可按照反饋形式的不同分為速度控制和位移控制,其中:當系統反饋量為絲杠轉速時為速度控制;當反饋量為導向輪位移時為位移控制,該系統設計為速度控制。排纜系統采用閉環反饋控制,光電編碼器檢測卷筒的轉速,通過換算轉化為絲杠轉速,該轉速可作為排纜控制系統的設定值。絲杠編碼器實時檢測絲杠的轉速作為反饋環節,對絲杠的實際轉速和設定轉速進行比較,輸入PID控制器,經過比例積分運算,將運算結果輸入變頻器,進而調節交流變頻電機的轉速,經過傳動機構對絲杠的轉速進行調整,實現絲杠對卷筒的實時跟隨控制。當導纜輪移動到兩端時,行程開關動作,控制器發出換向指令,實現自動換向,從而實現自動排纜功能[11]。
3.1 控制器結構
模糊自適應PID控制器主要由常規PID和模糊控制2部分構成(見圖4)。控制器根據設定值和實際值的誤差e及誤差變化率ec產生信號,模糊PID參數調節器調節PID控制器參數,從而使控制對象的輸出快速精準到設定值。
常規PID控制器的控制方程表達式為

式(6)中:Kp為比例系數;Ti為積分時間常數,Ti=Kp/Ki,Ki為積分系數;Td為微分積分時間常數,Td=Kp/Kd,Kd為微分系數;r(t)為設定值;Y(t)為輸出值。根據PID控制的基本原理:比例系數Kp的作用是調節系統的相應速度,提高系統的調節精度;積分系數Ki的作用是消除系統的誤差;微分系數Kd的作用是改善系統的動態特性。
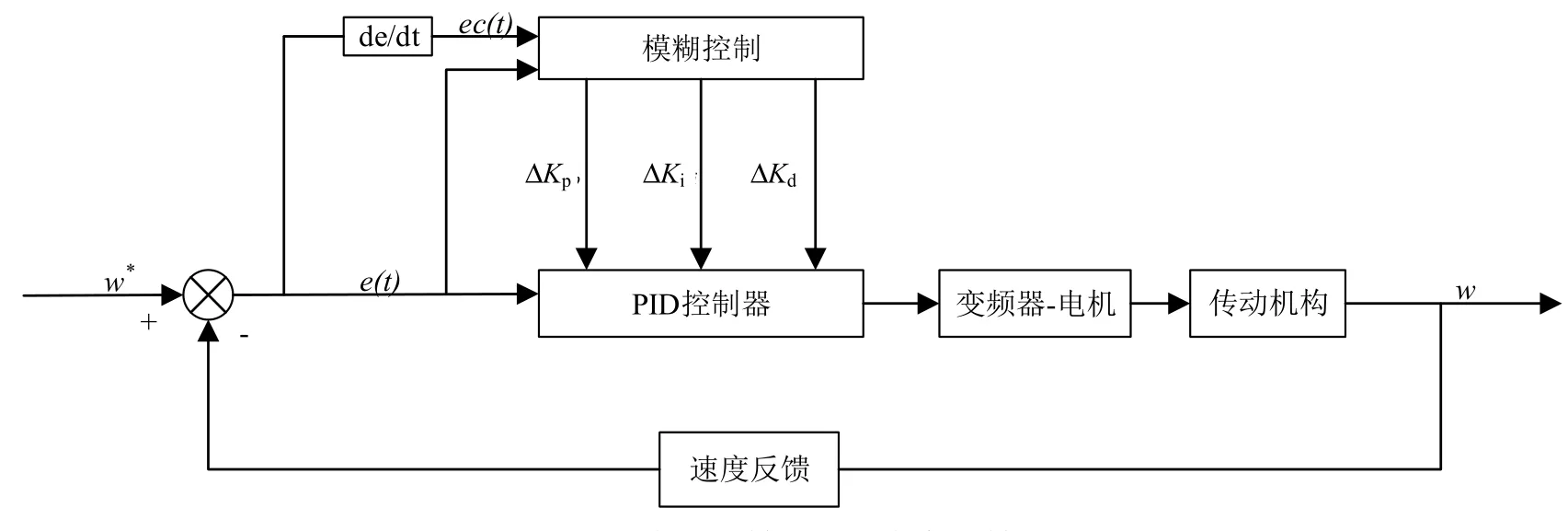
圖4 模糊PID控制器結構
3.2 模糊規則設計
模糊控制系統采用兩輸入三輸出系統,輸入為偏差e和偏差變化率ec,模糊控制器根據模糊規則進行推理,不斷地調整參數增量ΔKp、ΔKi和ΔKd輸入PID控制器,實現PID參數的在線調整,使被控對象具有良好的動態性能和靜態性能,滿足不同工況對 PID參數的要求。最終得到修正后的參數為:為PID控制器根據經驗預設的參數。輸入變量偏差e、ec和輸出變量ΔKp、ΔKi和ΔKd采用相同的模糊子集,記為{NB,NM,NS,ZO,PS,PM,PB},且均為三角形隸屬函數,根據經驗建立模糊控制規則表(見表1)[12-15]。在不同的偏差e和偏差變化率ec下,控制器參數Kp、Ki和Kd整定的要求是不同的,其規則如下:
1) 當較大時,為使系統具有較好的快速跟蹤性能,取較大的Kp和較小的Kd;同時,為避免出現較大的超調,Kd應取較小值。
2) 當中等大小時,為使系統具有較小的超調,Kp取較小值,Ki和Kd取值適中,以保證系統的響應速度。
3) 當較小時,Kp和Ki取較大值,以保證系統的穩定性;同時,為避免系統振蕩,并考慮系統的抗干擾性能,當較小時Kd取較大值,當較大時Kd取較小值。
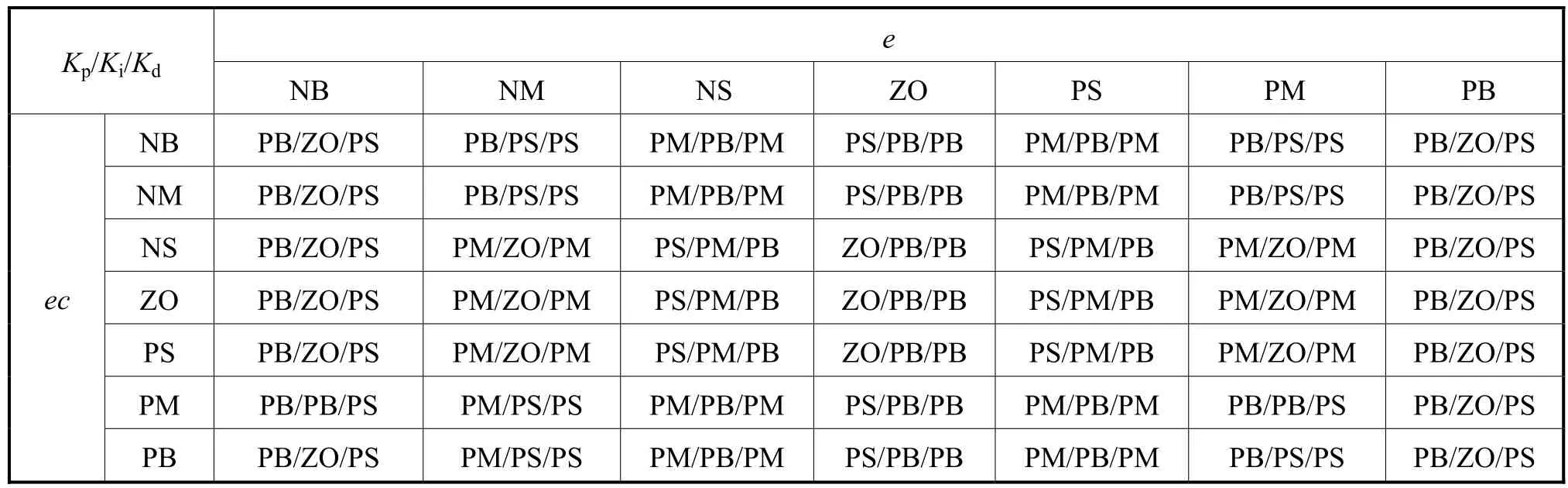
表1 模糊控制規則表
4 系統仿真分析
根據上述控制策略,在MATLAB/SIMULINK環境下建立排纜系統仿真模型(見圖5),排纜系統中各項參數設置為:變頻電機額定功率15kW;額定轉速1450r/min;額定電壓380V;轉動慣量0.1kg/m2;極對數2;定子電阻0.2761Ω;轉子電阻0.1645Ω;轉子漏感0.002191H;電機定子與轉子互感0.07614H。
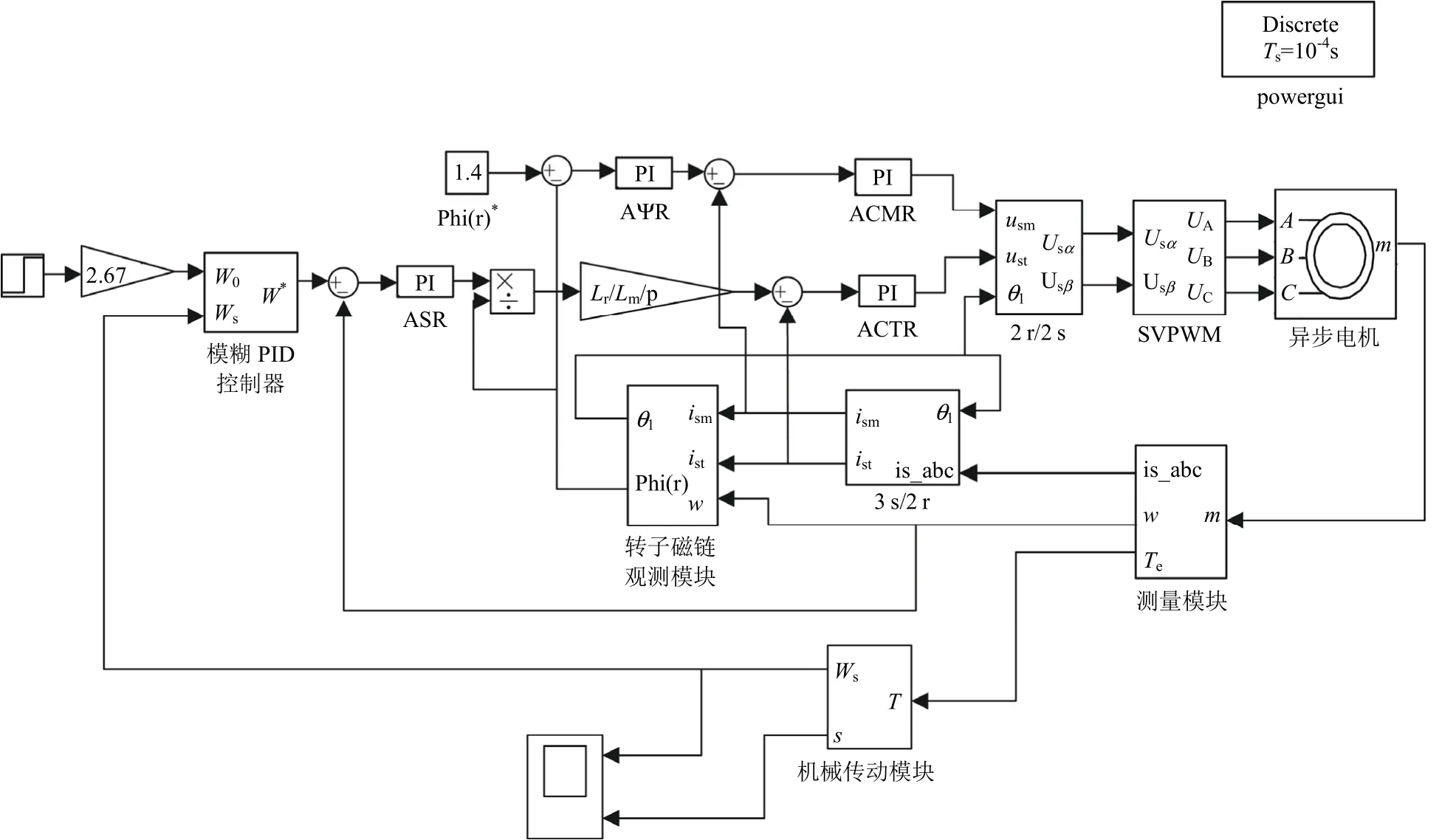
圖5 排纜系統仿真模型
設定系統的轉速為15r/min,當絞車作業負載為0、10t和20t時,分別對基于PID的排纜控制系統和基于模糊PID的排纜控制系統進行仿真,絲杠轉速響應曲線見圖6~圖8。
1) 絞車空載時,PID控制絲杠轉速在0.30s左右趨于穩定,超調量為3.4%;模糊PID控制絲杠轉速在0.20s左右趨于穩定,無超調量。
2) 絞車作業負載為10t時,PID控制絲杠轉速在0.43s左右趨于穩定,超調量為5.3%;模糊PID控制絲杠轉速在0.32s左右趨于穩定,無超調量。
3) 絞車作業負載為20t時,PID控制絲杠轉速在0.67s左右趨于穩定,超調量為12.0%,有穩態誤差;模糊PID控制絲杠轉速在0.50s左右趨于穩定,無超調量。
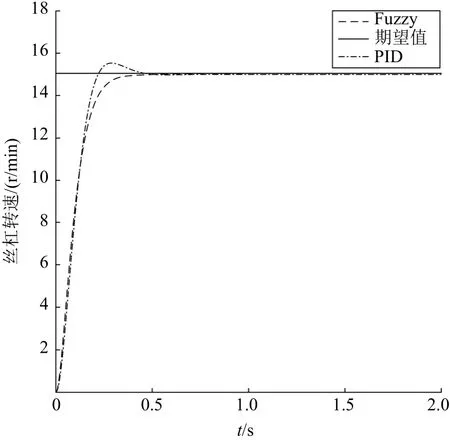
圖6 工況一絲杠轉速響應曲線
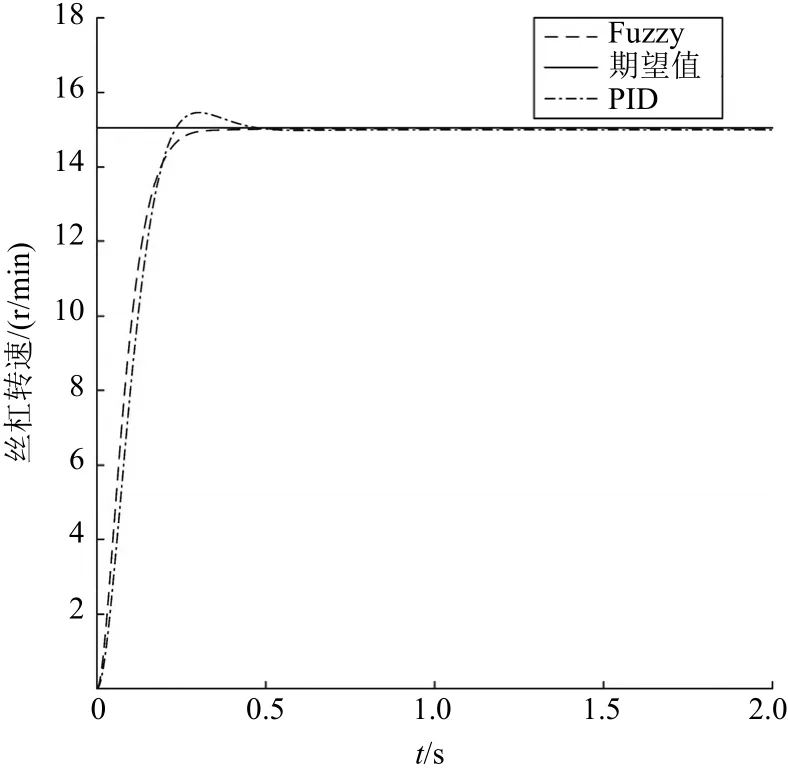
圖7 工況二絲杠轉速響應曲線
由仿真結果分析可知:PID控制器超調量較大,響應時間較長,絞車工作負載過大易產生穩態誤差;模糊PID控制器無超調量,響應時間小于0.50s,無穩定誤差,能較好地滿足排纜需求。
排纜系統的抗干擾能力也是判斷絞車工作性能的一個重要因素,在5級海況干擾下對模型進行仿真分析。海浪模型為復雜的非線性模型,為簡化工作流程,只考慮母船的升沉,不考慮縱搖運動,用線性模型代替。查閱參考文獻[7]可將波浪模型簡化為

式(7)中:W(s)為白色噪聲;取 5級海況,T=10s,Hs=3.5m,可得5級海況下母船的運動模型。海浪直接作用在母船上,纜繩與負載相連接,通過纜繩的張力帶動排纜機構[16]。纜繩張力的變化即為模型的干擾輸入,纜繩張力F的表達式為

式(8)中:m為纜繩和負載總的質量;a為負載加速度;Ff為負載所受阻尼和浮力。由此可得排纜系統的負載轉矩在不同海況下的變化模型,將其作為系統的輸入干擾進行仿真,仿真結果見圖9。
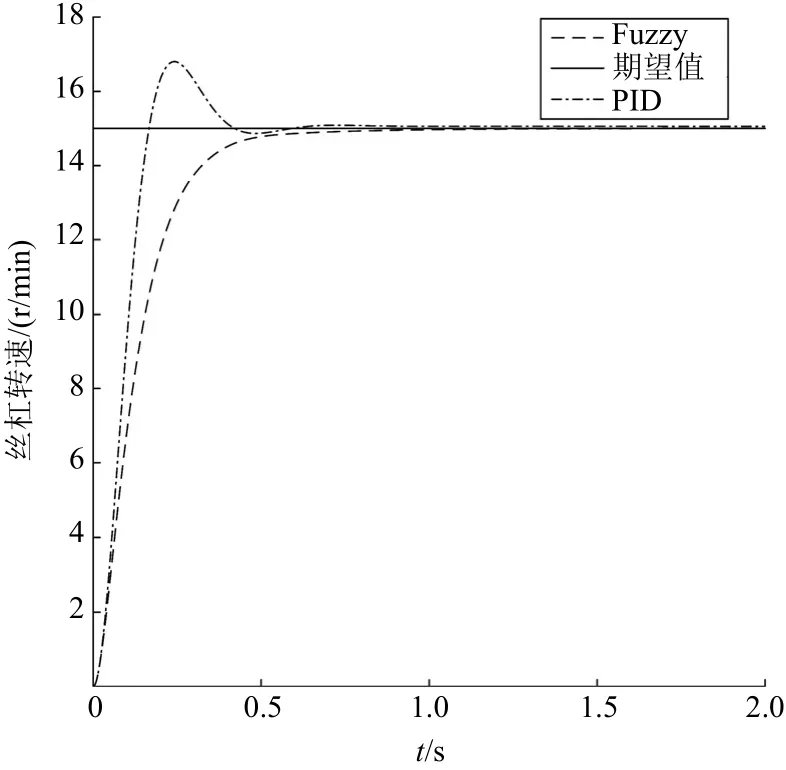
圖8 工況三絲杠轉速響應曲線
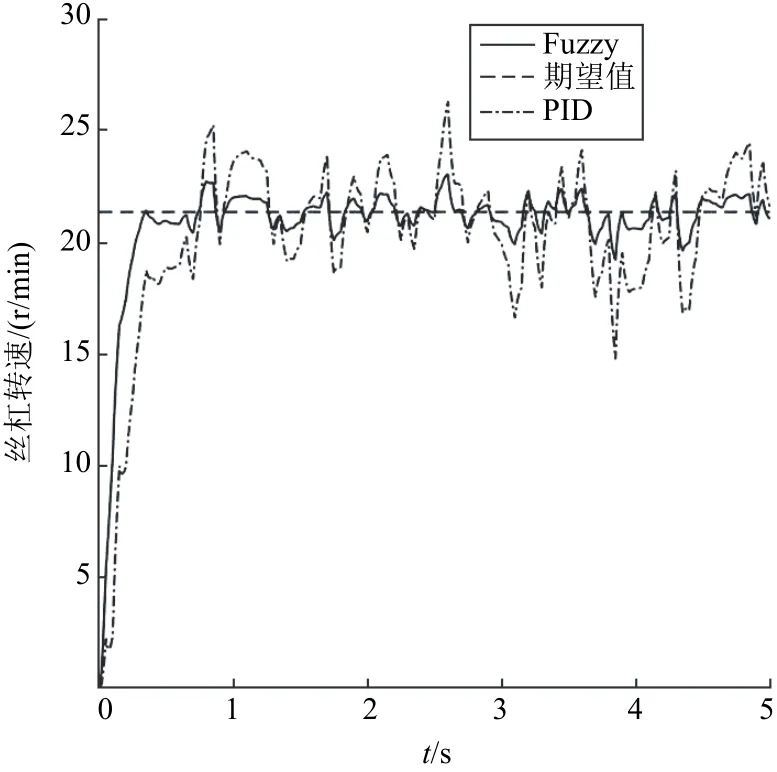
圖9 海浪干擾下絲杠轉速響應曲線
由仿真結果可知,PID控制系統在 5級海況干擾下的響應時間過長,超調量過大,易積累跟隨誤差導致纜繩出現纏繞、擠壓的狀況,縮短纜繩的使用壽命。與之相對比,模糊PID控制器對外界的干擾不太敏感,控制效果較穩定,具有較好的魯棒性。
5 結 語
本文對變頻電機驅動海洋絞車排纜控制系統進行研究,設計了與傳統PID相結合的模糊PID控制器,對系統的非線性和時變性等特性具有良好的適應性。結果表明:模糊PID控制系統具有良好的動態性能,無超調量和穩態誤差,響應時間不超過0.5s,在相同的工況下相對于傳統的PID控制有明顯的改善,控制效果更好,抗干擾性能較強,可為未來海洋絞車排纜技術的發展提供參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32