無人系統集群海上作戰應用研究?
2019-12-26 11:32:42郭興旺
艦船電子工程 2019年12期
關鍵詞:系統
王 宇 郭興旺
(91404部隊 秦皇島 066000)
1 引言
無人系統集群作戰開啟了作戰新模式,將成為未來海上信息化戰爭常態模式。智能化海戰模式可分為三類:人工智能輔助人員的海戰模式、人工智能和人員高度融合的海戰模式以及人員輔助人工智能的海戰模式。第三類海戰模式其特點是由無人裝備、智能化指揮控制系統自主完成作戰行動,在整個作戰過程中人員不做任何干預或者僅在關鍵節點進行有限干預,是智能化海戰的終極目標。無人系統可自主組成戰斗集群,運用無人系統集群戰法使得低成本的無人系統組合成高彈性的作戰力量。集群協同作戰更能發揮無人系統的優勢,提高任務成功率,完成單個無人智能個體難以完成的任務。
無人裝備正在向高空、高速、深潛和小型、微型化兩個方向發展,作戰維度也向兩端擴展。一方面,高空、高速和深潛型無人作戰平臺,能夠實施多空間、多方向、多角度同時突破,實現了維度外擴。另一方面,小型、微型無人作戰平臺,可滲透到敵內部空間,實施內窺式偵察和微創式打擊,實現了維度內擴。無人系統集群具有強大的戰場生存能力、環境適應能力、突防能力,可用于集群協同偵察、快速強力突擊、全域集群對抗、精準高效保障等任務。
2 無人系統集群作戰樣式
無人系統包括空中無人機系統、水面無人艇系統以及水下無人潛器系統等,將多個無人系統所構建的集群應用于海上作戰,為滿足作戰任務需求呈現出不同的作戰樣式。
2.1 無人機集群作戰
無人機集群作戰擁有單個無人平臺作戰無法比擬的優勢,可在廣域搜索、偵察監視、精準打擊等任務中大顯身手,其作戰樣式主要包括:
1)攻—實施多域打擊。無人機編隊可以攜帶不同類型設備和彈藥,同時對敵方陸地、海上、空中和網絡等多個作戰域實施全方位、多樣式的攻擊,從而破壞敵方的跨域聯合能力,以較小的代價實現作戰目的。
2)擾—進行戰術欺騙。無人機通過釋放大量假目標,迷惑敵防空指揮系統,誘騙敵雷達開機,進而實現對關鍵目標定位及摧毀。還可充當掩護,無人機集群組成前沿電子戰編隊,對敵方的預警雷達、制導武器進行電子干擾、壓制、欺騙等,掩護己方核心作戰能力。
3)偵—掃描戰場環境。掛載各種偵察探測設備的無人機集群編隊,能夠輕易突破敵方防空雷達的偵測潛入對方防護嚴密的區域進行抵近偵察,并通過集群間的數據鏈,將情報中繼傳回,為作戰提供可靠的敵情保障。
4)聯—開展協同作戰。一種是人機聯合,大量低成本無人機攜帶大量各種類型的傳感器以及導彈,組成前沿作戰編隊,而有人駕駛飛機則從后方對集群無人機進行指揮控制,或與有人機組成編隊,由有人駕駛飛機控制無人機僚機編隊作戰。另一種是機群聯合,無人機集群可形成一個具備偵察、干擾和打擊能力的復合編隊,或由若干個無人機集群分別配置偵察、火力模塊,再組成一個大型突擊編隊。
下面以無人機集群作戰實例“蜂群戰法”來說明無人機集群海上作戰應用。蜂群戰法是指由數十架小型無人機,根據作戰任務自行編組,形成攻擊蜂群,協同對敵發動攻擊的作戰方法。其核心是以小取勝、以量取勝、快速協同取勝,體現了動態聚能、精準釋能、以量取勝的制勝思想,打通了“偵察-控制-打擊-評估”鏈路,融合了相關作戰要素,形成敏捷、高效、精確的新型無人化作戰體系。2015年4月,美海軍研究團隊對這一戰法進行了實驗驗證,模擬良好氣象條件下,一艘安裝“宙斯盾”系統的驅逐艦遭受5~10架來自不同方向無人機攻擊的情況。結果表明,蜂群戰法能夠突防目前海上綜合防御能力最強的“宙斯盾”系統。如圖1所示,大規模、低成本、多功能的無人機集群通過空中組網、自主控制、群智決策,完成對海上作戰目標的偵察監視、干擾和打擊。

圖1 無人機蜂群作戰系統示意圖
2.2 無人艇集群作戰
無人艇集群可廣泛執行掃雷、反潛、信息作戰、偵察監視、目標指示、通信中繼和反恐攻擊等任務,其作戰樣式主要包括:
1)反水雷戰。用于淺海和極淺水域的水雷偵察和掃雷行動,執行的任務包括遠程施放、拖曳、回收獵雷聲納;清查航道,提供海底圖像的細節;將視頻圖像和聲吶數據傳給反水雷艦,為反水雷艦艇進出港口提供港口護衛。
2)反潛作戰。用于擴展海軍探測敵方潛艇的能力,可執行海上防御、通道保護、港口偵查以及保護海軍水面戰斗群的反潛任務等。
3)支持海上信息作戰。通過攜帶不同功能載荷,抵近敵信息平臺,可以在危險海域執行電子干擾、通信中繼、電子欺騙、海上反輻射攻擊等作戰任務。
4)支持水面艦艇作戰。用于為海上艦艇提供保護,執行海上封鎖/攔阻、可疑目標打擊、特種作戰、后勤支援與補給、戰場評估、取證等任務。
美國海軍于2014年和2016年分別進行了CARACaS(機器人自主指揮與感知的控制體系結構)技術演示驗證。如圖2所示,2016年演示驗證成功使無人艇集群協同、自主地實施了巡邏任務,任務執行過程只有遠程人員監控,沒有直接的人員操控。2014年演示驗證中所有無人艇都預置同樣程序,但因缺乏協同規劃造成多艇蜂擁而至的行為,2016年的實驗顯示CARACaS新增了協同任務分配、更多的行為和戰術以及自動艦船識別等能力。集群無人艇能夠制定計劃、進行任務分工,采用的行為引擎(Behavior Engine)能使編程人員創建一個復雜行為模式庫,更容易使CARACaS軟件進行行為更新,集群無人艇最終將能執行大量不同任務。
2.3 無人潛器集群作戰
近年來水下沖突的可能性越來越大,無人潛器將從秘密探測器和追蹤器,轉變為水下攻擊武器和協同作戰裝置,無人潛器集群作戰也將成為可能,其作戰樣式主要包括:
1)協同感知行動。無人潛器集群利用多型水下傳感器,按照任務分工、編成與部署,發揮傳感器的各自優勢、傳感器相互配合,完成復雜條件下對水下目標的檢測與定位和水文、地理環境的感知,為水下作戰提供情報信息。

圖2 無人艇集群執行巡邏任務
2)協同干擾行動。無人潛器集群利用艇載干擾設備,通過協同各自的航線、節點和干擾信號,干擾對方水下武器覆蓋區,使其短時間內無法正常工作,為己方水下武器裝備行動創造條件。
3)協同誘騙行動。無人潛器集群利用艇載誘餌裝置,根據指控系統指令適機欺騙對手的感知系統,引誘敵方水下火力開火、攻擊錯誤目標、使其消耗彈藥,為水下有人/無人攻擊編隊行動創造條件。
4)協同伏擊行動。無人潛器集群使用艇載彈藥等,按照指控系統指令啟動預先蟄伏部署的兵力,或與有人潛艇配合使用,從多個陣位、多個角度對敵方單個或多個水下目標實施伏擊。
5)協同水面行動。無人潛器集群利用傳感器、通信設備,根據預定程序或指控系統臨時指令,為水上己方艦船發送水下情報信息,引導其排雷、反潛攻擊行動。
6)協同空海行動。無人潛器集群利用傳感器、通信設備,根據預定程序或指控系統臨時指令,向空中待戰的航空器、海上待戰的反潛艦船發送水下情報信息,引導其攻擊敵方水下目標行動。
7)集群對抗行動。無人潛器集群根據指控系統指令,使用所有艇載傳感器、信息戰設備、通信設備、各種彈藥,與敵方的無人潛器集群和敵方空中、海上反潛武器展開偵察與反偵察、干擾與反干擾、欺騙與反欺騙、攻擊與反制等對抗行動。
美軍正在構建一支新型的水下無人作戰部隊,2020年將擁有至少1000套水下機器人,2025年達到2000套。屆時,水下作戰任務將更多由無人作戰系統承擔。圖3是美軍已建成的無人潛器集群,各型無人潛器可參與集群協同作戰。
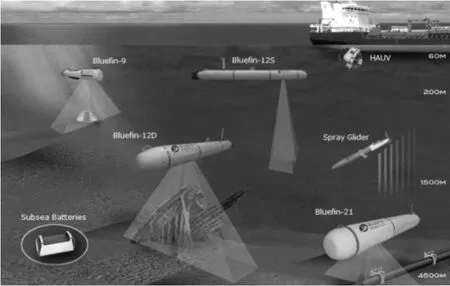
圖3 無人潛器集群作戰示意圖
3 無人系統集群作戰的技術特點
通過對無人系統集群作戰樣式的分析,可知集群作戰具有以下幾個技術特點。
1)作戰功能分布化
分布式探測。將單個完備作戰平臺所具備的各項能力化整為零,分散到大量低成本、功能單一的作戰平臺中,系統的倍增效應將使無人系統集群具備遠超單一平臺的作戰能力。廣域分布的多平臺能夠相互協作、相互驗證及融合判斷,完成對戰場目標的精準定位,提高整體探測能力。無人系統集群內各作戰平臺聯網行動,能夠實現平臺間的數據信息共享,可以達到“一點發現、全網皆知”,為實現協同作戰奠定基礎。
分布式生存。無人系統集群具有無中心和自主協同的特性,集群中的個體并不依賴于某個實際存在的、特定的節點來運行。在對抗過程中,部分隨機個體的失能并不會破壞整個集群的功能完整性,集群仍可繼續執行作戰任務。
分布式打擊。集群作戰方式下,將偵察監視、誘騙干擾、火力毀傷、效果評估等緊密藕合、相互銜接的各項能力,分散到低成本、功能單一的作戰平臺中,形成大量結構各異、功能互補的個體單元,通過交互協作實現原本復雜的聯合作戰功能,對威脅目標進行靈活打擊,防御方需要消耗數十倍甚至上百倍的成本來進行防御。
2)作戰行為智能化
集群智能是實現無人集群戰法的基礎條件,其優勢為:一是系統單個個體的能力和行為規則非常簡單,便于個體的模塊化設計生產和集群系統的組織實現;二是集群智能為分布式無中心的控制方式,集群中每個個體既彼此自治又高度連接,隨著群體數量的增大,通信開銷的相對增幅較小,集群規模具有較好的可擴充性;三是集群表現出來的復雜行為是通過簡單個體的交互過程突現出來的智能,這使得集群在適當的進化機制下可以實現單個智能個體無法實現的功能。
3)作戰效能涌現“1+1>2”效應
無人集群通過實時動態編組,在線任務分配、集群協同突防的方式,實現了以量取勝、動態聚能、精準釋能的飽和攻擊,整體效能大于單個效能的累加和。這主要體現在:集群將原本造價高昂的多任務系統分解為若干低成本的小型作戰平臺,比傳統武器系統更具成本效益;集群能夠多維感知戰場態勢,自主執行作戰計劃,精確選擇打擊目標,自行分配進攻任務,聯合進行火力打擊,可以短時間內從多角度、多方向發起集群進攻。
4 無人系統集群作戰過程中的技術難題
通過對無人系統集群作戰過程的梳理分析,可知其主要面臨以下技術難題。
1)態勢感知與數據融合。無人系統集群的感知與認識能力是其控制與決策的依據。目前集群感知手段主要有基于自身攜帶傳感器主動獲取戰場環境的態勢感知,基于數據鏈接收集群其他個體的態勢共享信息并形成統一的通用操作視圖。其相關技術包括多源異質傳感器分布式信息融合、集群態勢共享與通用作戰視圖、目標協同檢測-識別-跟蹤技術、突發威脅協同探測與定位技術等。無人系統集群中的多個體功能、空間位置的協同分布為集群態勢感知提供了更多可能性,針對不同的協同態勢感知方式和架構,需要采用不同的模型,針對性地采用不同的數據融合技術。
2)協同任務規劃與決策。無人系統集群的規劃與決策能力是其作戰過程的核心能力。不同的任務在作戰目標、時序約束、任務要求等方面存在顯著的差異性,并且任務之間可能存在約束關系,因此如何規劃最優作戰策略顯得尤為關鍵。無人系統集群在不確定環境中和最少的人工干預下,通過集群協同決策,促使各個個體自適應地采取某種機動策略,使無人系統集群涌現出更有效的智能行為。針對高對抗、強不確定及時間敏感的環境中隨時可能出現的包括任務目標改變、威脅和環境變化、集群成員損傷等突發情況,需要無人機集群具備實時任務調整和重規劃的能力,快速響應外界環境的變化,提高任務效率和使用靈活性。
3)信息交互與自主協同控制。無人系統集群的信息交互與自主協同控制能力是完成作戰任務的前提。協同控制是指在執行任務過程中,如何形成并保持一定的幾何構型,以適應平臺性能、任務環境、戰術任務等要求,主動解決編隊生成與保持、智能避障和不同環境下編隊構型的動態調整和重構等問題。集群控制技術挑戰在于集群中無人個體數量越多難度越大、集群間的避碰控制、隊形自組織和拆分/重組等、集群協同航行控制技術。集群系統具有高度復雜性、行為多樣性,需要多種控制策略的組合來滿足協同控制需求。
5 無人系統集群對抗技術難點與挑戰
無人集群系統對抗將成為越來越重要的一種作戰樣式,集群對抗技術將成為智能化戰爭的核心關鍵技術,其面臨的技術難點和挑戰還很多,主要表現在:
1)群體對抗建模方面。一是對群體智能的演化、學習、自組織基本原理的認識仍不充分;二是在建模具體方法上需深入研究大規模無人集群協同體系對抗的動態自適應模型;三是需研究雙方甚至多方集群對抗過程的演化機理、定量和定性分析。
2)集群協同決策與規劃方面。一是深化集群架構的研究,并從理論上探索新型的群體智能協同組織架構與方法;二是研究在實際應用中如何在有限、甚至不可靠的通信、計算等資源下,進行有效、可靠的協同決策;三是使群體決策的結果具有可解釋性。
3)集群智能控制方面。一是底層的運動控制,二是邏輯結構與關系的可控性,三是功能的優化與控制。集群對抗過程個體存在不確定性,但通過集群的組織和控制,實現集群整體的可控,對集群控制規則的深度和廣度進行量化研究,研究適應于集群對抗的智能控制方法是將無人集群系統大規模應用于實戰所必須攻克的難題與挑戰。
6 結語
具有“平臺簡單、高度協調、完全自主、群體智能”特點的無人系統集群的應用改變了海上作戰的作戰樣式,無人作戰平臺憑借其自主交互和聯動響應的優勢,實現橫向聯通、縱橫一體,大大提高海上作戰指揮控制的效率,將引發新一代戰爭模式的顛覆性變革。無人系統集群必將成為未來海戰場中的重要作戰力量,在海洋戰爭及海陸空協同作戰中扮演重要角色。本文分析了無人系統集群海上作戰應用的作戰樣式、技術特點、技術難題以及集群對抗技術難點與挑戰,還需深入研究無人系統集群作戰方法,以在未來戰場中取得對抗優勢,實現集群作戰效能最大化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
