上肢康復機器人研究進展綜述
2020-01-03 12:42:21徐東徐晗李益斌張珝李曉龍
現代信息科技 2020年16期
徐東 徐晗 李益斌 張珝 李曉龍

摘? 要:康復機器人已成為上肢運動功能障礙患者進行康復治療的重要方法之一。文章通過回顧國內外近年來的研究進展和研究成果,結合康復訓練需求,將上肢康復機器人按照使用方式的分類方法,分為末端引導式和外骨骼式兩大類,并對其中具有代表性的研究成果從機器人的結構設計、控制設計、康復訓練內容、傳感檢測等方面進行著重介紹,為上肢康復機器人的研究與設計提供參考依據。
關鍵詞:上肢運動功能障礙;康復治療;康復機器人;外骨骼
中圖分類號:TP242;R496? ? ? 文獻標識碼:A 文章編號:2096-4706(2020)16-0142-04
Review on Research Progress of Upper Limb Rehabilitation Robot
XU Dong,XU Han,LI Yibin,ZHANG Xu,LI Xiaolong
(Auckland Tongji Rehabilitation Medical Equipment Research Center,Tongji Zhejiang College,Jiaxing? 314051,China)
Abstract:Rehabilitation robot has become one of the important methods for rehabilitation treatment of patients with upper limb motor dysfunction. This paper reviews the research progress in recent years at home and abroad and the research results,combined with rehabilitation training needs,the upper limbs rehabilitation robot according to the way of using classification method,divided into two categories:terminal heuristic and exoskeleton,and some representative research results from the structure of the robot design,control design,the rehabilitation training content,sensing detection is introduced,the research and design of the robot for upper limb rehabilitation to provide the reference basis.
Keywords:motor dysfunction of upper limbs;rehabilitation treatment;rehabilitation robot;exoskeleton
0? 引? 言
腦卒中是一種急性腦血管疾病,嚴重危害人類健康和生命安全,具有高發病率、高死亡率以及高致殘率的特點[1]。根據統計,我國的腦卒中發病率高于全球平均水平,每年約有250萬新發腦卒中病例和750萬腦卒中幸存者。在腦卒中幸存者中,70%~80%會伴有不同程度的殘疾,尤以偏癱最為常見。據臨床研究表明,積極接受有效的康復治療可使90%的患者重新獲得行走和生活自理能力,若不進行康復治療,該比例僅為6%[2]。因此,對于腦卒中癱瘓患者盡早開展康復訓練顯得尤為重要,有效的康復訓練可以輔助患者最大限度地改善運動功能障礙,減輕后遺癥。
對于腦卒中患者,傳統康復治療方法主要是患者定期前往醫院或者康復中心,康復治療師針對其進行“一對一”的手法治療,康復效果較大程度依賴醫師的治療水平,訓練強度難以保證。國內外學者將機器人技術與臨床康復醫學結合,提出基于康復機器人的輔助訓練方案,發揮其優勢進行重復性高強度的勞作,減輕醫護人員負擔,增加患者獲得康復治療的機會,并保證康復訓練強度。同時,康復機器人精度高、智能化程度高,能夠自動記錄訓練數據,提供客觀、詳細的評價參數,輔助醫師調整治療方案,提高康復訓練效果,進而進一步調整治療方案,提升康復訓練效果和患者治療積極性,使患者早日恢復健康水平。
考慮到目前88%的腦卒中幸存者,上肢運動功能在某種程度上受到限制,且與下肢康復相比,上肢復雜的解剖結構使其恢復更加復雜[3]。上肢康復機器人因其完整的上肢運動控制能力,能夠完成更加復雜化、精細化的上肢康復訓練動作,已逐漸成為康復醫學工程領域中的研究熱點。奧克蘭·同濟康復醫療設備研究中心(以下簡稱“奧同中心”)致力研究國內外康復醫療設備前沿技術,開展上肢康復機器人相關產品的自主研發,本文通過對近些年來國內外上肢康復機器人研究進展的綜述,為奧同中心自主研發項目——上肢協調康復機器人的研究與設計,提供前期研究基礎。
1? 分類
目前上肢康復機器人的分類方法較多,可以按照康復訓練內容,分為主動式、被動式和主被動結合式;也可根據其使用形式,分為末端引導式和外骨骼式兩類。末端引導式機器人輔助患者康復訓練時,患者的手部抓握或綁定于機器人的末端執行器,機器人通過驅動末端執行器從而帶動人體手部運動,進而實現上肢各關節的康復訓練。外骨骼式機器人常設計為典型的仿生手臂結構形式,可穿戴到人體上肢,對各關節進行精確控制,以實現單關節獨立運動和多關節復合運動。本文主要依據使用形式分類,對國內外具有代表性的研究成果進行闡述,并分析上肢康復機器人未來的發展趨勢,為上肢康復機器人的研究與設計提供參考依據。
2? 研究現狀
在美國、日本和歐洲一些國家,因受老齡化影響,其國內的康復機器人產業起步較早,并有部分成熟的研究成果進行了產業化投放市場。我國康復機器人相關研究雖然起步較晚,但隨著我國老齡化進程加劇,政府對老年人、殘疾人康復產業關注的日益增加,以及機器人技術的蓬勃發展,清華大學、哈爾濱工業大學等科研機構涌現出大量的優秀的研究成果,對于國內康復機器人的研究與產業化具有顯著的引導作用。
2.1? 末端引導式
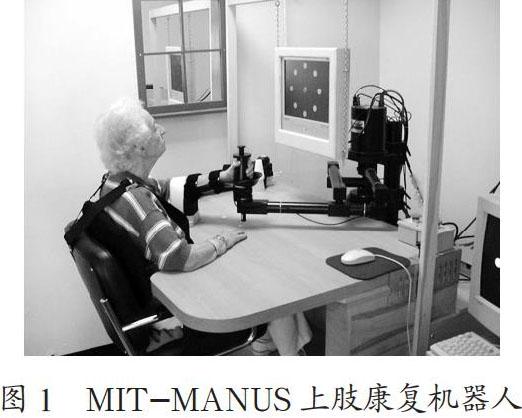
美國麻省理工學院(MIT)Hogan教授開發了第一臺上肢康復機器人MIT-MANUS[4],如圖1所示。其采用SCARA串聯式五連桿結構,末端具有二自由度,可輔助患者進行肩關節、肘關節在水平面內的康復訓練。Hogan教授首次提出阻抗控制算法,以提高康復訓練過程中人機交互的柔順性。患者可根據自身病情選擇被動訓練模式,在機器人的牽引下,以預設軌跡完成被動康復訓練,也可通過增加適當的阻尼,輔助患者進行肌力訓練。MANUS內置的傳感器可實時采集訓練過程中的位置、速度、力等各類數據,并將數據傳輸至上位機界面進行可視化,有效幫助患者和醫師進行臨床評價。在MANUS的基礎上,MIT團隊增加了對手腕關節的輔助訓練裝置,從而實現肩、肘、腕五自由度的康復訓練,并開展了初步的臨床試驗。MIT-MANUS作為上肢康復機器人的鼻祖,從結構形式、控制算法、傳感監測等方面,對于后期學者開展的康復機器人研究具有很好的導向作用。
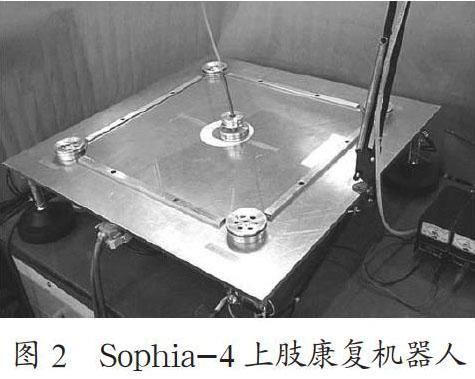
意大利帕多瓦大學研制了上肢康復機器人Sophia系列[5],以多組繩索和滑輪實現肢體末端牽引式康復訓練,如圖2所示。
其代表性的Sophia-4機器人,共使用了4個電機以分別驅動滑輪轉動,4組滑輪纏繞的繩索共同牽引末端執行器,通過手部握持安裝于末端執行器處的手柄,實現上肢運動。相比MANUS,Sophia-4可對工作平面進行傾角調整,可以更好地輔助肩關節的屈/伸自由度訓練。末端執行器采集的力學信息、位置信息以及滑輪組繩索的張力分別傳輸至上位控制器和下位控制器實時計算,其數據以及視覺反饋可在PC顯示器上實時顯示。
清華大學是我國最早開始研究康復機器人的科研機構之一,從2000年開始承擔國家“863課題”以來,其一直從事與上肢康復機器人的研究與產業化工作。其中比較有代表性的研究成果為二自由度上肢平面康復機器人[6],如圖3所示。其結構形式采用二連桿機構,實現手部末端引導訓練,實現肩關節、肘關節的大范圍運動,結構設計簡單。該系統在康復訓練策略上設計有被動模式、助力模式和阻抗模式,并可結合腦電信號實現患者的自主訓練。系統內嵌有位置傳感器、力傳感器,對患者康復訓練過程中的運動學信息和力量信息進行采集和處理,實現對患者康復情況的跟蹤與評價。
末端引導式機器人側重關注末端手部的運動軌跡,其傳感器往往只用于采集末端手部的位置和力信息,對于上肢其他關節的運動學和力學信息缺乏有效反饋。并且該類機器人常用于輔助患者進行某一平面內的訓練,無法較好實現立體空間的關節運動,尤其對于具備多自由度的肩關節,可實現的自由度數量以及關節活動范圍均十分有限,從而導致機器人難以模擬上肢日常行為運動軌跡,無法實現復雜的康復訓練內容。
2.2? 外骨骼式
自2009年開始,蘇黎世聯邦理工學院研制了ARMin系列上肢骨骼康復機器人[7],ARMin Ⅰ如圖4所示。
其最新研制的ARMin Ⅲ,相比ARMin Ⅰ和ARMin Ⅱ自由度更加豐富,并增加了四個被動自由度,增強了關節運動的舒適性和靈活性,較好地適應患者肢體尺寸導致的個體差異。ARMin系列機器人在各關節安裝有位置傳感器和力/力矩傳感器,可對關節運動信息進行采集和記錄,患者在訓練時可通過PC端界面看到虛擬人物在做同樣的動作,并通過任務引導式的游戲提高患者的訓練積極性。在控制算法上,研究人員通過阻抗控制和導納控制的算法設計,提高了人機協作時的柔順性。
美國特拉華大學Mao等人提出了一種繩索牽引驅動的上肢外骨骼康復機器人CAREX系列[8],如圖5所示。該機器人設計有七個電機,可實現肩、肘、腕五自由度運動。CAREX為一種新型的輕質外骨骼,將外骨骼的剛性連接替換為固定在活動肢體上的輕質袖口結構,通過多股繩索多方向聯合驅動每個袖口結構,袖口結構再驅動肢體運動。這種多股繩索多方向的驅動方式,較好地解決了單股繩索無法提供推力的問題。與ARMin Ⅲ相比,CAREX的總體重量減輕至后者的十分之一,僅有1.5 kg。
哈爾濱工業大學的陳燕燕設計了一種混聯式可調節六自由度外骨骼,適用于坐姿/站姿狀態下人體上肢單關節/多關節康復運動訓練[9],如圖6所示。該機器人設計有一套重力平衡裝置,可對機器人系統進行靜態和動態部分平衡,降低了關節驅動成本。研究人員引入表面肌電信號(SEMG)來表征患者的主動運動意圖,通過神經網絡方法對患者的運動趨勢進行預判,增強患者康復訓練的主動參與性,并以健康人作為受試對象,進行了被動、主動康復訓練試驗,驗證了其設計的基于SEMG和軌跡線性化(TLC)的控制策略具備良好的軌跡跟隨性能。
上肢外骨骼康復機器人模擬人體上肢對應關節分布特征布置,這要求人機對應關節的軸線/心在康復訓練過程中始終保持對齊或重合。以肩關節為例,人體肩關節的生理位置是由肩鎖關節、胸鎖關節、肱骨姿態等共同決定,外骨骼機器人的機械軸線較難做到與肩關節軸線/心實時對齊,導致出現人機協作不相容問題[10]。但與牽引式康復機器人相比,外骨骼康復機器人可以實現上肢在立體空間內的訓練,可以較好地實現上肢各個關節的運動控制。
目前國內也涌現出一批創新型企業,通過與高校產學研合作和自主研發,推出了一系列的上肢康復機器人產品。上海傅利葉智能科技有限公司研發的ArmMotus M2上肢康復機器人[11],采用二自由度平面引導式結構設計,可為患者提供沉浸式的康復訓練體驗,提高患者運動的力度、速度、準確度等多維度的訓練效果,重塑上肢功能,如圖7所示。廣州一康醫療設備實業有限公司推出的三維上肢訓練與評估系統A6[12],采用七自由度外骨骼式結構設計,除實現常規的被動、助力和主動訓練外,還增加了軌跡示教功能,可實時模擬人體上肢運動規律,結合情景互動、訓練反饋和評估系統,提高患者康復訓練效果,如圖8所示。
3? 結? 論
目前國內外較多的上肢康復機器人仍處于科學研究中,距離臨床使用還有較多的難題需要解決。末端引導式康復機器人的結構形式限制了康復訓練任務的復雜性,不易實現復雜運動訓練,多關節聯合訓練時無法較好兼顧每個關節。外骨骼康復機器人存在軸線對齊、個體間肢體尺寸差異問題,對于機器人結構設計、控制柔順性都有較高的要求。
康復訓練的目標是幫助患者最大程度地改善功能障礙,提升生活自理能力,回歸家庭。在任務引導方面,應更關注日常生活活動的能力要求,設計提高適應性的訓練任務;在機器人的結構設計上,應從肢體生理結構出發,符合患者的運動特點、身體特征以及訓練空間的要求,并能適應患者間的個體化差異。同時,在機器人控制系統設計中,應加入大量的傳感器,采集患者的力學信息、運動學參數、生物電信號等數據,并對數據進行處理、分析,實時獲得患者訓練過程中的狀態變化,自適應調整訓練任務,提高人機協作的柔順性交互。
目前,康復訓練呈現出巨大的剛性需求,國家政策的大力支持必將促進康復機器人蓬勃發展,在北京、上海、廣州等城市先后涌現出大量康復機器人研發企業,相信不久的將來,康復機器人將成為支撐“健康中國”戰略國家“大健康”戰略的重要一環,幫助更多的功能患者重獲健康。
參考文獻:
[1] 王隴德,劉建民,楊弋,等.我國腦卒中防治仍面臨巨大挑戰——《中國腦卒中防治報告2018》概要 [J].中國循環雜志,2019,34(2):105-119.
[2] 陳茂.運動療法和針刺治療在腦卒中后偏癱康復中的應用 [J].醫藥衛生(全文版),2016(12):142.
[3] 王博恒.基于ROS的肩關節康復機器人控制系統設計與實現 [D].南京:南京郵電大學,2019:9.
[4] VOLPE B T,KREBS H I,HOGAN N. Is robot-aided sensorimotor training in stroke rehabilitation a realistic option [J].Current opinion in neurology,2001,14(6):745-52.
[5] ROASTI G,ZANOTTO D,SECOLI R,et al. Design and control of two planar cable-driven robots for upper-limb neurorehabilitation [C]//2009 IEEE International Conference on Rehabilitation Robotics. Kyoto,Japan:IEEE,2009.
[6] 胡宇川,季林紅.一種偏癱上肢復合運動的康復訓練機器人 [J].機械設計與制造,2004(6):47-49.
[7] NEF T,MIHELJ M,KIEFER G,et al. ARMin-Exoskeleton for Arm Therapy in Stroke Patients [C]//2007 IEEE 10th International Conference on Rehabilitation Robotics. Noordwijk,Netherlands:IEEE,2007.
[8] MAO Y,AGRAWAL S K. Design of a Cable-Driven Arm Exoskeleton (CAREX) for Neural Rehabilitation [J].IEEE Transactions on Robotics,2012,28(4):922-931.
[9] 陳燕燕.上肢外骨骼機器人康復訓練系統研究 [D].哈爾濱:哈爾濱工業大學,2017.
[10] 張雷雨,李劍鋒,劉鈞輝,等.上肢康復外骨骼的設計與人機相容性分析 [J].機械工程學報,2018,54(5):19-28.
[11] 傅利葉智能.ArmMotus? M2上肢康復機器人 [EB/OL].[2020-07-15].https://www.fftai.cn/product/M2.php.
[12] 致郁系綠.廣州一康上肢訓練與評估系統A6 [EB/OL].[2020-07-15].https://v.qq.com/x/page/n08247vk75j.html.
作者簡介:徐東(1990.07—),男,漢族,浙江衢州人,助理研究員,碩士,研究方向:康復機器人及可穿戴智能設備。