無人機遙感監測下配電線路終端故障檢測方法
2020-01-05 07:03:20招志強陳建文
粘接 2020年12期
招志強 陳建文

摘要:針對配電線路終端故障檢測“快、準、穩”的需求,為實現復雜現場遙感監測和故障檢測,以最大限度確定配電網運行安全。研究構建了輕型無人機遙感系統,采用Phantom 4 Advanced型四旋八翼碳纖維輕質化無人機,以ARM9微處理器作為地面導航的主控模塊,使用GPS信息自動規劃航拍路徑,融合Lightbridge圖傳技術和無線通信技術進行遙感圖像的傳輸,以實現低耗、高效的遙感監測;同時,為提高多尺度目標、小故障點的檢測精度,引入了一種融合RPN結構的改進FasterRCNN,通過多尺度訓練、相似性度匹配、OHEM樣本均衡機制等改進FasterRCNN,以優化故障檢測方法的魯棒性,最后,通過對比實驗,所設計方法在故障檢測結果的完整度和準確性上均具有明顯優勢,可滿足配電線路終端故障應急處理的要求。
關鍵詞:多源干擾;遙感圖像;配電線路;故障檢測
中圖分類號:TM755;V279
文獻標識碼:A
文章編號:1001-5922(2020)12-0176-05
0 引言
無人機遙感監測因靈活性強、操作簡便、環境適應性強等,成為配電線路終端故障實時監測的首選方式,而限于多源環境干擾及長距離、大范圍的監測需求,研究將以提升無人機的續航、即時飛停、海量存儲的航拍控制性作為重點。同時,基于人工智能技術的進步,對無人機遙感監測圖像的智能分析日漸成熟,一類為Faster RCNN、Mask R- CNN,一類為YOLO、SSD回歸的目標監測算法[1],兩類均可用于無人機遙感圖像數據的智能分析。FasterRCNN因具有高精準的檢測特性,更適用于配電線路終端故障的檢測需求,但傳統檢測使用RPN進行候選區域劃分時,均需要使用獨立的卷積神經網絡提取特征圖,訓練時間長且占用過大內存,而將各個獨立使用的網絡整合至一個卷積神經網絡,可規避該問題;同時,基于配電線路終端早期故障檢測點小、尺度多樣,以最高特征圖進行故障檢測,容易出現漏檢、錯檢問題,且基于故障點所占比例較小,負樣本空間過大,引致了Faster RCNN樣本失衡問題,為此,研究將以這方面的不足作為故障檢測方法設計的重點。
1 配電線路終端的無人機遙感檢測系統
配電線路周圍多配設通訊、電力鐵塔及線路,容易受到多種干擾源的影響,為靈活進行飛行控制、調整拍攝視角,以獲取多目標的遙感圖像,研究選用起飛靈活的旋翼無人機,從整體上,無人機遙感監測系統由無人機、航拍系統、飛行控制及地面監測等4大模塊構成。
1)輕型旋翼無人機:為適應大范圍、復雜環境下配電線路多目標、多尺寸的故障目標檢測需求,研究選用由碳纖維材料制成的大疆精靈Phantom 4 Ad-vanced輕型無人機,其配設的FlightAutonomy系統,可實現無GPS信號下的精準懸停,能夠適應各類配電線路終端故障檢測的各類復雜場景。
2)航拍系統:無人機配有2000萬像素的相機以及可實時調控鏡頭方向的云臺,且機身前方的雙目視覺傳感器,檢測距離高達30m,在15m范圍內的障礙物前可自動調整飛行模式、懸停或繞行嘲。航線規劃是航拍的關鍵,其應該覆蓋故障點范圍的平面,應該根據配電線路高程變化動態調整航線高度,飛行過低則續航時間要求過高,飛行過低則遙感成像不清晰。
3)遙感圖像采集:無人機5h超長續航的遙控器集成Lightbridge高清圖傳技術,可在7km內傳輸和控制遙感圖像,配置的5.5英寸1080P顯示屏可高清觀測遙感圖像,且內置的DJG04可實時查看、編輯和分享遙感圖像;而為擴充無人機遙感圖像存儲量,另增設Sdram、Flash兩存儲器,其中Sdrarn選用8MB的64kx16bit的HY57V641620芯片,用于存儲航拍程序運行中的中間數據,Flash采用2MB的256kx16bit的SST39VF400芯片[3-4],用來存航拍視頻。完成遙感圖像采集后,采用無線通信模式,利用編碼正交頻分復用方式來規避多徑效應,以實現遙感圖像與地面監測站的遠距離傳輸,滿足配電線路長距離監測需求。
4)地面監測:該模塊主要向無人機發送定點航拍的任務指令,控制器航拍軌跡,并接收配電線路終端的遙感監測圖像,而復雜環境下無人機遙感監測下,需要實現靈活飛停、自主定點航拍的功能,為此,該地面控制采用并行處理能力的ARM9200微處理器,其通過內部程序輸出PWM驅動脈沖,可協同操控多個無人機的舵機[5],用以完成大范圍、多目標的遙感監測任務。
2 配電線路終端的故障檢測方法
2.1 Fast RCNN故障檢測方法
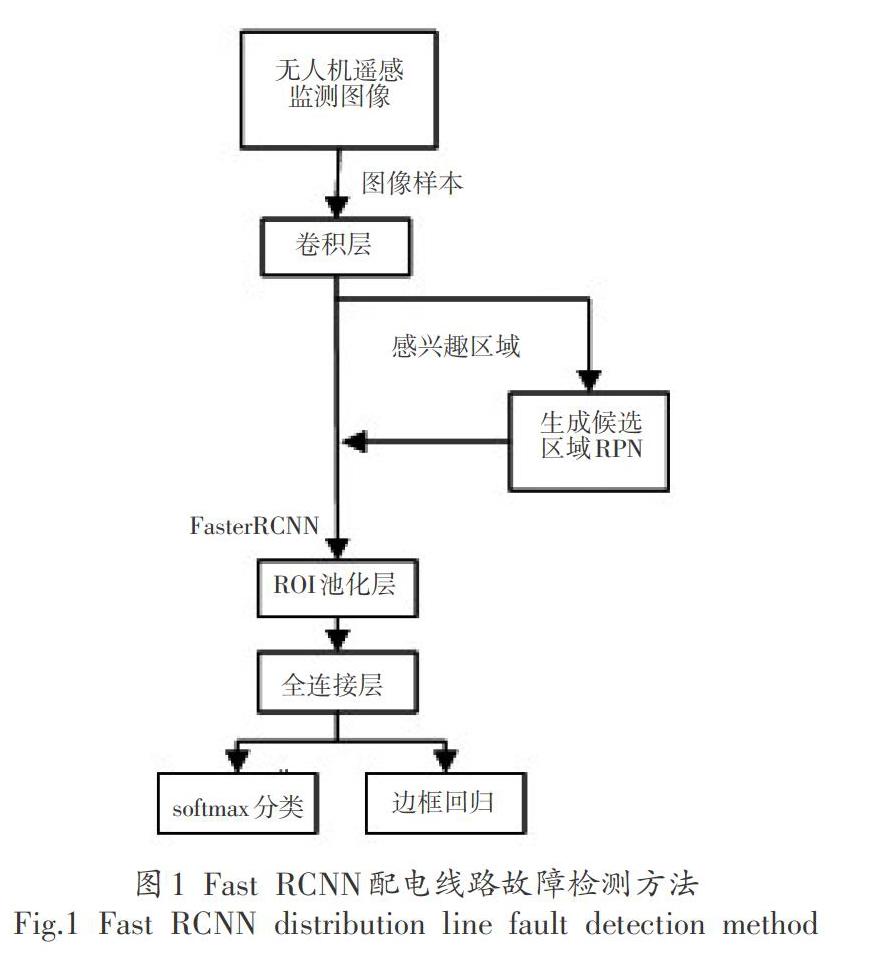
Fast RCNN主要由特征提取網絡、RPN區域建議網絡和Fast RCNN故障檢測等3大模塊構成[6],配電線路終端故障檢測時,可先將獲取的遙感圖像數據集輸入卷積神經網絡的卷積層,此處選定ResNet50深度殘差網絡對遙感圖像進行特征提取,獲得最高特征圖后,采用反池化法對其進行采樣,生成低特征圖,并與原各層特征圖將融合;而后,利用RPN區域建議網生成候選區域,將其映射至融合的特征圖中,得到相應的特征值,便可基于“注意力”機制,指引FastRCNN在候選框中進行故障檢測,利用ROI池化層生成固定尺寸的特征圖輸入至全連接層中,引入探測softmax分類概率和邊框回歸生成配電線路終端故障所屬類別概率和區域坐標[7],即可實現故障檢測。基于Fast RCNN的配電線路終端故障檢測方法如圖1所示。
2.2 基于RPN生成候選區域
在Faster RCNN檢測模型中,Selective Search為提取候選框方法,但其耗時高,而RPN本質是“基于滑窗的無類別obejct檢測器”,可將物體檢測整個流程融人Faster RCNN,耗時低,為此,研究采用RPN網絡生成候選區域,首先將無人機遙感檢測圖像輸入ResNet50卷積網絡,采用3x3的卷積核以滑動窗口的形式生成候選目標位置,并以每個位置為中心映射至原圖上得到9個錨定框[8],如此,便得到大量的錨定框。為從中篩選出對配電線路終端故障檢測最有效的建議區域,需要利用探測softmax和邊框回歸對RPN候選框進行聯合訓練,具體步驟如下:
1)采用探測softmax分類方法,以錨定框與真實框之間的IOU比值,為每個錨點分配一個二進制的標簽,正標簽分配給IOU比例值高于0.7的錨定框,將負標簽分配給所有IOU比例值小于0.3的錨定框,以區分前景(物體)和背景[9]。
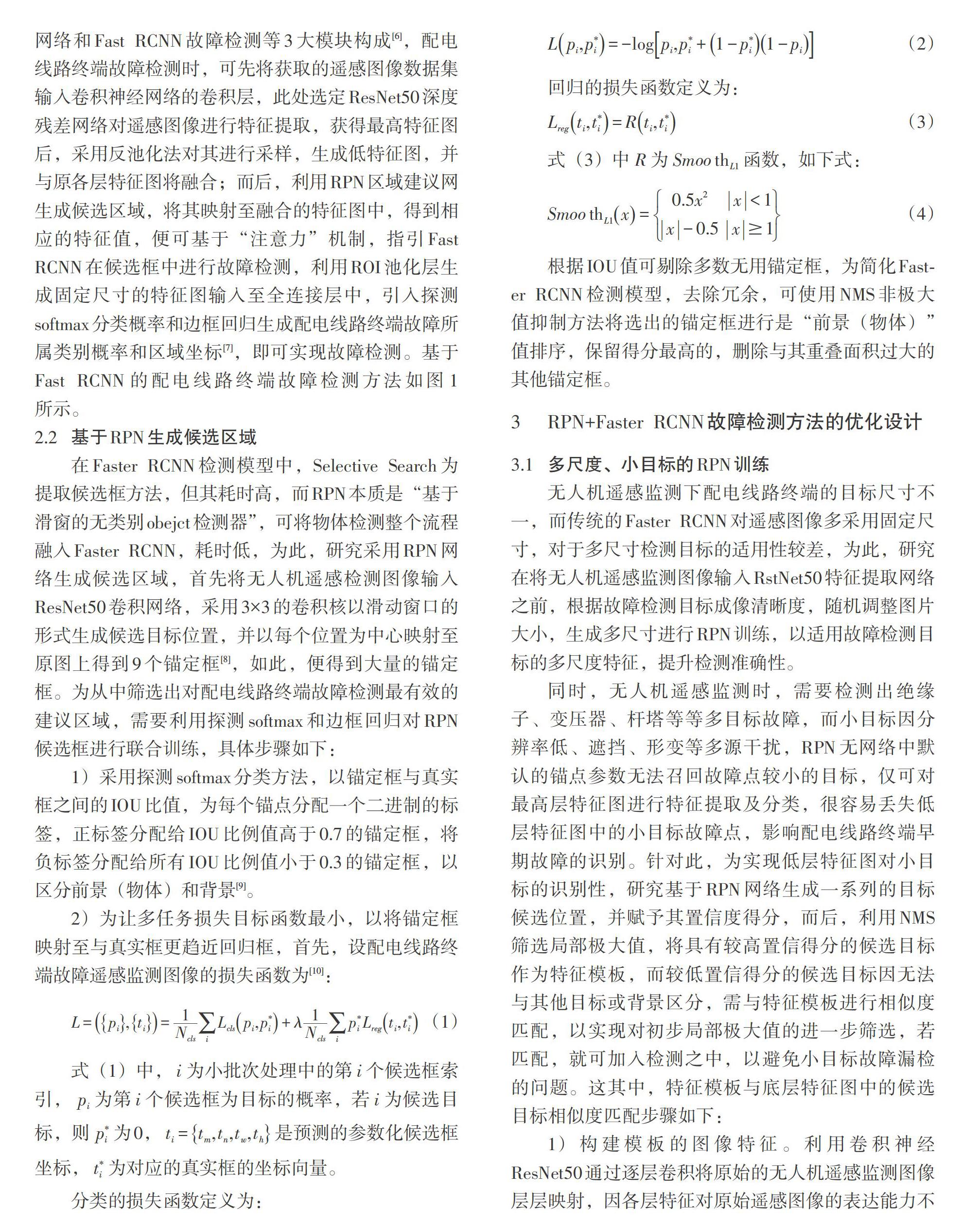
2)為讓多任務損失目標函數最小,以將錨定框映射至與真實框更趨近回歸框,首先,設配電線路終端故障遙感監測圖像的損失函數為[10]:
根據IOU值可剔除多數無用錨定框,為簡化Fast-er RCNN檢測模型,去除冗余,可使用NMS非極大值抑制方法將選出的錨定框進行是“前景(物體)”值排序,保留得分最高的,刪除與其重疊面積過大的其他錨定框。
3 RPN+Faster RCNN故障檢測方法的優化設計
3.1 多尺度、小目標的RPN訓練
無人機遙感監測下配電線路終端的目標尺寸不一,而傳統的Faster RCNN對遙感圖像多采用固定尺寸,對于多尺寸檢測目標的適用性較差,為此,研究在將無人機遙感監測圖像輸入RstNet50特征提取網絡之前,根據故障檢測目標成像清晰度,隨機調整圖片大小,生成多尺寸進行RPN訓練,以適用故障檢測目標的多尺度特征,提升檢測準確性。
同時,無人機遙感監測時,需要檢測出絕緣子、變壓器、桿塔等等多目標故障,而小目標因分辨率低、遮擋、形變等多源干擾,RPN無網絡中默認的錨點參數無法召回故障點較小的目標,僅可對最高層特征圖進行特征提取及分類,很容易丟失低層特征圖中的小目標故障點,影響配電線路終端早期故障的識別。針對此,為實現低層特征圖對小目標的識別性,研究基于RPN網絡生成一系列的目標候選位置,并賦予其置信度得分,而后,利用NMS篩選局部極大值,將具有較高置信得分的候選目標作為特征模板,而較低置信得分的候選目標因無法與其他目標或背景區分,需與特征模板進行相似度匹配,以實現對初步局部極大值的進一步篩選,若匹配,就可加入檢測之中,以避免小目標故障漏檢的問題。這其中,特征模板與底層特征圖中的候選目標相似度匹配步驟如下:
1)構建模板的圖像特征。利用卷積神經ResNet50通過逐層卷積將原始的無人機遙感監測圖像層層映射,因各層特征對原始遙感圖像的表達能力不同,為了提取更具故障檢測力特征作為模板,需要分析各層特征對不同類別的區分度。
2)將卷積層的特征尺度設為Kx WxH,其中,K為該層卷積特征圖的數量,W×H為特征圖的大小[13],研究選用漢明距離表示高低層特征之間的距離,距離越大,則相似度匹配越高,公式為:
3.2 基于OHEM機制的RPN訓練樣本均衡
Faster RCNN故障檢測時,因配電線路終端故障點目標在遙感監測圖像中所占比例較少,存在負樣本過多的問題,造成正負樣本失衡,RPN網絡在進行分類時容易將錯誤目標誤判為正確的且置信分數較高的樣本,此即為困難樣本。以往的均衡方式是使用特定比例的正負樣本進行分類器訓練,而后,再用測試集進行檢測,提取困難樣本加入初始訓練集中重新訓練,但每次訓練所需的固定模型在卷積神經網絡中無法實現。為此,研究引入OHEM機制,來解決FasterRCNN網絡框架RPN訓練中負樣本過多的問題,將Faster RCNN的ROI池化層以后設定為ROI網絡,通過OHEM機制的引入,將原有的1個ROI網絡拓展為可共享網絡參數的2個ROI網絡,一個為只讀,根據式(1)計算全部候選區域的loss值并排序,選定loss值較大的部分候選區作為困難樣本,將其輸入另一個ROI網絡進行訓練,并輸出預測的配電線路終端故障的分類結果和位置,該方法不依托于正負樣本的比例來解決失衡問題,可提升Faster RCNN故障檢測的準確性。
4 故障監測方法的應用分析
4.1 檢測準確性分析
無人遙感監測下配電線路終端故障檢測結果準確性,可利用目視解譯將其與已知參數數據進行比較,但該方法無法量化,所以,研究引入完整度和準確度來評價故障檢測的結果。
完整度計算公式為:
式(6)中,TP為檢測出的配電線路終端故障數量,TN為未檢測出的配電線路終端故障數量。
準確度計算公式為:
式(7)中,TP為正確檢測出的配電線路終端故障數量,TN為錯誤檢測出的配電線路終端故障數量。
為驗證RPN+FasterRCNN故障檢測方法優化前后的準確性,選用能見度較好、風力4級以下的2019年5月2日、8月10日、10月2日等3次獲得的500張遙感監測圖像,通過多尺寸、相似度匹配、OHEM樣本均衡機制等改進FasterRCNN,對配電線路終端故障進行檢測,對比其與原始的FasterRCNN方法的差異,所得結果如表l所示。
由表1可知,改進的FasterRCNN的完整度,準確度分別達到了91.98%、94.37%,較未改進前的配電線路終端故障檢測有明顯的提升,這是因為通過多尺寸、底層特征圖小目標與高層特征圖相似度匹配后,其對于小目標故障點的漏檢率顯著改善;且引入OHEM機制,使用困難樣本進行標準RIO網絡訓練,有效解決了正負樣本失衡的問題,改善了錯檢的問題。
4.2 改進設計的效果
為檢驗FasterRCNN故障檢測方法優化設計的有效性,將分析3種改進策略不同組合下的配電線路終端故障檢測效果,結果如表2所示。
由表2可知,改進設方法1和2相比,通過對無人機遙感監測圖像的多尺度訓練,配電線路終端故障檢測準確度提升了0.93%;改進方法2和3相比,通過底層特征圖與特征模板的相似度匹配,使得RPN+FasterRCNN的網絡模型對于小目標故障檢測的魯棒性更優,對應的配電線路終端故障檢測準確度提升了1.03%;改進方法2和4對比,通過OHEM困難樣本機制引入,可均衡訓練網絡中正負樣本,優化故障目標的檢測率,可見,上述針對RPN+FasterRCNN故障檢測模型的3種優化設計方案,任意一種均能夠提升配電線路終端故障的檢測準確性。
5 結語
無人機遙感監測具有高效、宏觀、高分辨率的優勢性,在配電線路終端故障檢測和應急處理中應用廣泛,而上述提出的無人機遙感監測,創新點在于擴增了存儲量、簡化了起飛操控、并改進了圖傳技術,實現了在復雜、多源干擾下場景的遙感圖像的快速采集及回傳;同時,在故障檢測方法上,所提出的改進RPN+Faster-RCNN網絡模型,從多層面優化了對不同故障目標的監測敏感度,相較于以往的先檢測故障線路電流波形再進行聚類分析、診斷故障的算法,效率和準確性更優。
參考文獻
[1]謝樺,陳昊,張沛,配電線路多源數據挖掘時變故障概率計算[J/OL].電力系統及其自動化學報,2020( 09):63-67.
[2]鄒敬龍,配電線路故障在線監測裝置自動化檢測技術的實際應用[J].機電工程技術,2019,48(12):213-215.
[3]王偉賢,李鐘慎.lOkV配電線路防雷改造探索[J].國外電子測量技術,2019,38( 12):107-110.
[4]王超洋,樊紹勝,劉錚,等,基于改進FasterRCNN的配網架空線路異常狀態檢測[J].電力學報,2019,34(04):322-329.
[5]陳晨,楊晶,吳亮.無人機遙感監測下大氣污染源追蹤定位仿真[J].計算機仿真,2019,36(06):32-35.
[6]沈偉奇,崔風情,陳士俊,等,基于雷達探測的輸配電線路綜合驅鳥系統研究[J].電子測量技術,2019,42(11):1-4.
[7]王勇軍,李智,孫山林,等.輕小型無人機遙感組網飛行的高程安全監測冗余容錯算法研究[J].地球信息科學學報,2019,21(04):542-551.
[8]陳丹,林清泉,基于級聯式Faster RCNN的三維目標最優抓取方法研究[J].儀器儀表學報,2019,40 (04):229-237.
[9]高明,趙振剛,李英娜,等,基于光纖傳感的輸電線路桿塔傾斜監測研究[J].電子測量與儀器學報,2018,32(12):51-59.
[10]李輝,鐘平,戴玉靜,等,基于深度學習的輸電線路銹蝕檢測方法的研究[J].電子測量技術,2018,41(22):54-59.