空管自動化系統(tǒng)起飛落地報(bào)自動拍發(fā)算法研究
2020-01-08 02:22:44馬博敏
現(xiàn)代信息科技 2020年15期
摘 ?要:為了更好地保障民航安全,降低空管運(yùn)行風(fēng)險(xiǎn),提高空管自動化系統(tǒng)的保障水平,文章在傳統(tǒng)空管自動化系統(tǒng)需要人工拍發(fā)航班起飛、落地報(bào)的基礎(chǔ)上,提出了一種空管自動化系統(tǒng)的自動判斷發(fā)送航班起飛、落地報(bào)的算法,研究了自動拍發(fā)報(bào)文的實(shí)現(xiàn)流程。該技術(shù)應(yīng)用在空管自動化系統(tǒng)中后極大地減輕了管制員的負(fù)擔(dān),保障了空管安全運(yùn)行。
關(guān)鍵詞:空管自動化;自動拍發(fā);起飛落地報(bào)
中圖分類號:TP39 ? ? 文獻(xiàn)標(biāo)識碼:A 文章編號:2096-4706(2020)15-0132-03
Abstract:In order to better ensure the safety of civil aviation,reduce the risk of air traffic control operations,and improve the security level of the air traffic control automation system,based on the traditional ATC automation system needs to send flight departure and landing reports manually,this paper puts forward an algorithm of automatic judgment and sending flight departure and landing messages in ATC automation system,and studies the implementation process of automatic sending messages. The application of this technology in ATC automation system greatly reduces the burden of controllers and ensures the safe operation of ATC.
Keywords:ATC;Automatic sending;departure and landing reports
0 ?引 ?言
空中交通管制自動化系統(tǒng)(Air Traffic Control System,ATC系統(tǒng))是民航空管單位對空實(shí)施管制的核心系統(tǒng)之一,該系統(tǒng)通過接收和處理一/二次雷達(dá)、ADS-B及多點(diǎn)等多種監(jiān)視源數(shù)據(jù),為民航管制員生成直觀可視的航跡目標(biāo),供管制員對飛行器進(jìn)行監(jiān)視控制,管理飛機(jī)起降和航行,保障飛行秩序和安全。
傳統(tǒng)空管自動化系統(tǒng)中,航班起飛、降落后,由塔臺管制員手動拍發(fā)該航班的起飛報(bào)(DEP報(bào))、落地報(bào)(ARR報(bào)),以通知各相關(guān)管制單位該航班已經(jīng)起飛或者降落。隨著國內(nèi)航班量的快速增長,空中交通流量也快速加大,特別是在一些交通樞紐型的大型機(jī)場,高峰時(shí)段每小時(shí)進(jìn)出港的航班已經(jīng)接近90架,平均不到1分鐘就需要起飛或者降落一個(gè)航班。在這種情況下,如果繼續(xù)采用傳統(tǒng)的手動拍發(fā)起飛、落地報(bào)的工作模式,管制員的工作負(fù)荷和壓力會非常大,會對空中交通安全造成潛在的安全隱患。因此迫切需要使用新的技術(shù)手段來代替管制員手動拍發(fā)起飛、落地報(bào)的傳統(tǒng)工作方式。
1 ?傳統(tǒng)方法問題分析
傳統(tǒng)空管自動化系統(tǒng)使用過程中,管制員人工拍發(fā)電報(bào)的工作模式需要管制員將注意力從監(jiān)視、指揮、調(diào)配空中航班飛行,轉(zhuǎn)移到填寫各種報(bào)文信息,手動拍發(fā)報(bào)文上。當(dāng)空中流量較大,單位時(shí)間內(nèi)起飛、落地的航班較多的情況下,會導(dǎo)致管制員需要頻繁地切換注意力,而這種頻繁的切換會導(dǎo)致管制員無法將注意力很好地集中到指揮空中航班飛行上,從而可能引發(fā)管制員不能很好地建立情景意識,準(zhǔn)確地發(fā)出管制指令,進(jìn)而對空管運(yùn)行造成安全隱患。
為了緩解這種安全隱患,一些地區(qū)采取了讓飛行服務(wù)中心代替塔臺管制員拍發(fā)起飛報(bào)和降落報(bào)的工作模式,以降低塔臺管制的工作量和壓力。但是同時(shí)又增加了飛行服務(wù)中心管制員的工作環(huán)節(jié)和運(yùn)行壓力,而且指揮和報(bào)文拍發(fā)分成兩個(gè)單位執(zhí)行,又會引起報(bào)文拍發(fā)時(shí)機(jī)錯(cuò)誤的問題。
2 ?自動拍發(fā)報(bào)文算法
為了解決上述系列問題,本文提出了一種空管自動化系統(tǒng)自動拍發(fā)航班起飛報(bào)和落地報(bào)的算法。該算法中為空中交通管制系統(tǒng)劃設(shè)起飛判斷空域和落地判斷空域,空中交通管制系統(tǒng)根據(jù)接收到的多監(jiān)視源融合目標(biāo)數(shù)據(jù),實(shí)時(shí)地判斷出航班是否實(shí)際已起飛或者著陸,并計(jì)算出航班的實(shí)際起飛時(shí)間和實(shí)際落地時(shí)間,自動生成起飛報(bào)和落地報(bào)發(fā)送出去,從而實(shí)現(xiàn)讓空中交通管制自動化系統(tǒng)自動地拍發(fā)起飛報(bào)和落地報(bào)。該算法的目的是讓管制員擺脫手動拍發(fā)起飛、落地報(bào)的繁重工作,解決傳統(tǒng)技術(shù)讓管制員注意力頻繁切換的問題,實(shí)現(xiàn)了使管制員將注意力全部放在監(jiān)控、指揮、調(diào)配空中航班上的效果,從而更好地保障航班的空中飛行安全性。
2.1 ?自動拍發(fā)起飛報(bào)算法模型
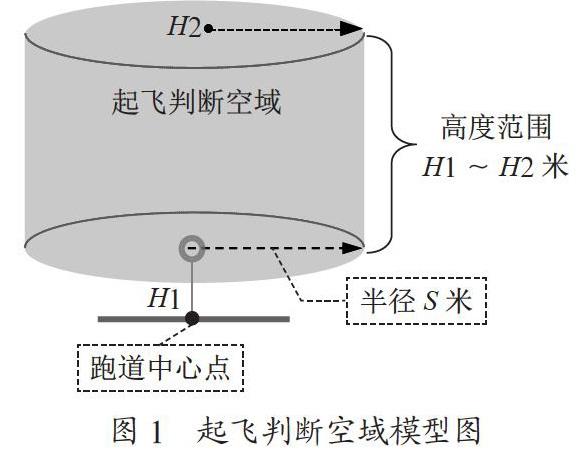
首先,為空管自動化系統(tǒng)的每條跑道設(shè)置一個(gè)起飛判斷空域模型:(1)以該跑道的中心點(diǎn)為中心,劃設(shè)一個(gè)半徑S米(參數(shù)可配置,一般劃設(shè)為8 000米)的圓周作為柱體的底部投影面積;(2)設(shè)立一個(gè)底部高度H1,頂部高度H2的柱體高度范圍(參數(shù)可配置,一般H1=機(jī)場海拔標(biāo)高AH+20~60米,H2=機(jī)場海拔標(biāo)高AH+1 000米),作為空管自動化系統(tǒng)判斷航班實(shí)際已起飛的柱體空域的高度范圍。
起飛判斷空域模型如圖1所示。
其次,空管自動化系統(tǒng)根據(jù)接收到的多監(jiān)視源目標(biāo)融合數(shù)據(jù),檢測一個(gè)處于預(yù)激活狀態(tài)(已放行)的出港航班的二次雷達(dá)應(yīng)答機(jī)編碼SSR碼對應(yīng)的目標(biāo)是否處于上文劃設(shè)的柱體空域內(nèi)。
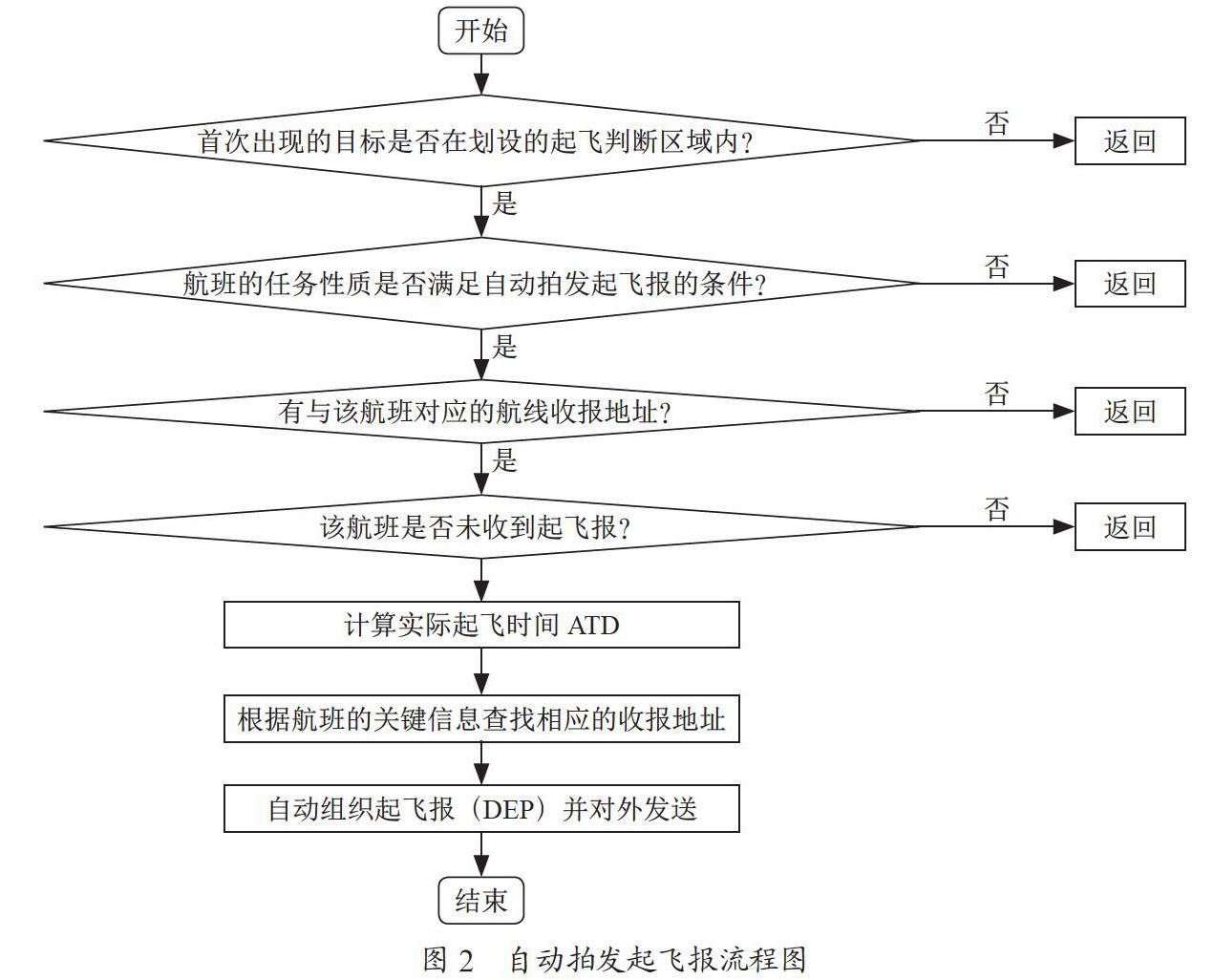
如果該目標(biāo)處于該柱體空域內(nèi),則空管自動化系統(tǒng)認(rèn)為航班實(shí)際已經(jīng)起飛,系統(tǒng)將飛行計(jì)劃和該目標(biāo)建立關(guān)聯(lián)關(guān)系,并將當(dāng)前時(shí)刻N(yùn)OW作為空管自動化系統(tǒng)觀察到航班的起飛時(shí)刻。開始以下條件判斷:(1)目標(biāo)與飛行計(jì)劃相關(guān)(自動或手動);(2)航班的任務(wù)性質(zhì)滿足自動拍發(fā)起飛報(bào)的條件;(3)有與該航班對應(yīng)的航線收報(bào)地址;(4)該航班尚未收到過起飛報(bào)。
同時(shí)滿足上述條件后,空管自動化系統(tǒng)建立一個(gè)從使用該跑道的航班實(shí)際起飛到空管自動化系統(tǒng)上航班實(shí)際起飛時(shí)間的經(jīng)驗(yàn)時(shí)間差T(參數(shù)可配置,一般T為0~60秒),空管自動化系統(tǒng)將觀察到的航班起飛時(shí)刻N(yùn)OW減去該時(shí)間差T,即可得到航班準(zhǔn)確的實(shí)際起飛時(shí)刻ATD(Actual Time of Departure)。
計(jì)算得到實(shí)際起飛時(shí)刻后,空管自動化系統(tǒng)根據(jù)航班的關(guān)鍵信息(起飛、目的機(jī)場、航空公司),從發(fā)報(bào)地址庫查找與航班對應(yīng)的收報(bào)地址,自動生成起飛報(bào)并對外發(fā)送。
該算法的流程說明如圖2所示。
起飛報(bào)自動拍發(fā)算法的主要功能實(shí)現(xiàn)讓空管自動化系統(tǒng)在不需要管制員人工干預(yù)的情況下,自動判斷出港航班是否實(shí)際已起飛,并計(jì)算得到相應(yīng)的實(shí)際起飛時(shí)間,自動組織并對外發(fā)送起飛報(bào)。
2.2 ?自動拍發(fā)落地報(bào)的算法
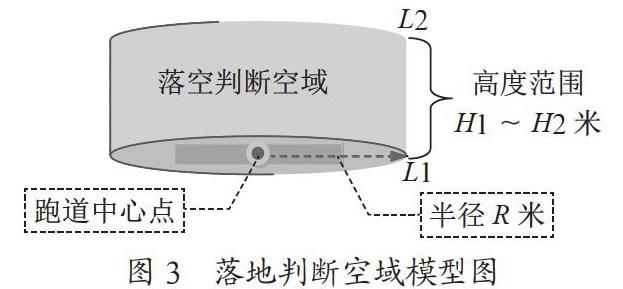
首先,為空管自動化系統(tǒng)的每條跑道劃設(shè)一個(gè)落地判斷空域模型:(1)以跑道的中心點(diǎn)為中心,劃設(shè)一個(gè)半徑為R米(該參數(shù)可配置,一般劃設(shè)為5 000米)的圓周作為柱體的底部投影面積;(2)設(shè)立一個(gè)底部高度L1,頂部高度L2的柱體高度范圍(參數(shù)可配置,一般L1=機(jī)場海拔標(biāo)高AH-20米,L2=機(jī)場海拔標(biāo)高AH+200米),作為空管自動化系統(tǒng)判斷航班實(shí)際已落地的柱體空域的高度范圍。
落地判斷空域模型如圖3所示。
其次,空管自動化系統(tǒng)根據(jù)接收到的多監(jiān)視源目標(biāo)融合數(shù)據(jù),檢測進(jìn)港航班雷達(dá)目標(biāo)的最后消失點(diǎn)是否處于該柱體空域內(nèi)。如果航班目標(biāo)的最后消失點(diǎn)落在該柱體空域范圍內(nèi),則空管自動化系統(tǒng)認(rèn)為航班可能已經(jīng)落地,空管自動化系統(tǒng)記錄當(dāng)前時(shí)刻N(yùn)OW作為實(shí)際落地時(shí)間ATA(Actual Time of Arrival)。
為了避免判斷失誤,當(dāng)航班出現(xiàn)復(fù)飛或因?yàn)槔走_(dá)覆蓋范圍不足等原因?qū)е碌哪繕?biāo)短暫消失,這些情況下航班目標(biāo)雖然消失了,但實(shí)際上航班還并沒有實(shí)際落地,可能短暫消失后又會出現(xiàn)。空管自動化系統(tǒng)在獲取到航班實(shí)際落地時(shí)間后不會立刻拍發(fā)落地報(bào),而是會進(jìn)行T秒(該參數(shù)可根據(jù)實(shí)際運(yùn)行經(jīng)驗(yàn)配置,一般設(shè)置為60秒)時(shí)間的連續(xù)計(jì)時(shí),如果到連續(xù)計(jì)時(shí)結(jié)束,航班的雷達(dá)目標(biāo)始終沒有再出現(xiàn),此時(shí)空管自動化系統(tǒng)才會認(rèn)為航班真正已降落著陸。
空管自動化系統(tǒng)會根據(jù)航班的關(guān)鍵信息(起飛、目的機(jī)場、航空公司),從發(fā)報(bào)地址庫查找與航班對應(yīng)的收報(bào)地址,自動生成落地報(bào)并對外發(fā)送。
此算法的主要功能實(shí)現(xiàn)讓空管自動化系統(tǒng)在不需要管制員人工干預(yù)的情況下,自動判斷出港航班是否實(shí)際已落地,并記錄相應(yīng)的實(shí)際落地時(shí)間,自動生成并對外發(fā)送落地報(bào)。
3 ?應(yīng)用結(jié)果
本算法目前已經(jīng)在國內(nèi)多家空管單位的空管自動化系統(tǒng)上進(jìn)行了技術(shù)應(yīng)用,且經(jīng)過了較長時(shí)間的運(yùn)行驗(yàn)證,該算法能夠較準(zhǔn)確的計(jì)算出航班的起飛時(shí)間和落地時(shí)間,且能成功自動組織和拍發(fā)起飛報(bào)和落地報(bào),很好地滿足了空管管制的使用需要。算法中對于起飛判斷空域和落地判斷空域的劃設(shè)模型,以及相應(yīng)的自動拍發(fā)起飛報(bào)和落地報(bào)的程序處理邏輯,可實(shí)現(xiàn)讓系統(tǒng)按照管制運(yùn)行需要自動拍發(fā)起飛、落地報(bào),大幅減少了一線管制員的人工拍發(fā)起飛報(bào)和落地報(bào)的操作負(fù)荷,緩解了管制壓力。
4 ?結(jié) ?論
本文在傳統(tǒng)空管自動化系統(tǒng)需要人工拍發(fā)航班起飛報(bào)和落地報(bào)的基礎(chǔ)上,提出了一種空管自動化系統(tǒng)自動拍發(fā)起飛報(bào)和落地報(bào)的算法。該算法技術(shù)應(yīng)用在空管自動化系統(tǒng)中后,實(shí)現(xiàn)了讓空管自動化系統(tǒng)自動拍發(fā)起飛報(bào)和落地報(bào),極大地減輕了管制員的工作負(fù)擔(dān),使管制員能夠把更多的精力和注意力放在對空中飛行的航班進(jìn)行監(jiān)控、指揮、調(diào)配工作上,對保障民航空中交通的安全具有非常重要的意義。
參考文獻(xiàn):
[1] 姜志剛.航行電報(bào)自動化處理系統(tǒng)設(shè)計(jì)存在的問題和解決策略 [J].空中交通管理,2011(10):75-78.
[2] 胡今晶.民航空管自動化系統(tǒng)管理探析 [J].信息通信,2015(6):286-287.
作者簡介:馬博敏(1981.09—),女,漢族,陜西周至人,主任工程師,碩士研究生,研究方向:空管自動化系統(tǒng)。