無(wú)人機(jī)1∶500比例尺測(cè)圖關(guān)鍵影響因素分析及應(yīng)用研究
2020-01-14 06:55:20萬(wàn)雷黃維任宏旭喻守剛
城市勘測(cè) 2019年6期
關(guān)鍵詞:模型
萬(wàn)雷,黃維,任宏旭,喻守剛
(1.長(zhǎng)江空間信息技術(shù)工程有限公司(武漢),湖北 武漢 430010; 2.長(zhǎng)江三峽勘測(cè)研究院有限公司(武漢),湖北 武漢 430074)
1 引 言
無(wú)人機(jī)作為一個(gè)新興的載體,在傳統(tǒng)農(nóng)林作業(yè)、工業(yè)測(cè)量和土地資源調(diào)查、智慧城市、數(shù)字考古、搶險(xiǎn)救災(zāi)、三維實(shí)景、城市規(guī)劃、新農(nóng)村建設(shè)、物流配送、地理國(guó)情監(jiān)測(cè)等應(yīng)用中保持強(qiáng)勢(shì)增長(zhǎng)[1]。無(wú)人機(jī)低空遙感數(shù)字航空攝影測(cè)量系統(tǒng)已經(jīng)成為獲取地形測(cè)量數(shù)字成果的重要手段之一,無(wú)人機(jī)機(jī)動(dòng)靈活、高效快速,無(wú)須專用機(jī)場(chǎng)起降,可進(jìn)行手拋起飛、彈射起飛和傘降、滑降以及垂直起降等多種方式,并且基于無(wú)人駕駛系統(tǒng),回避了飛行員人身安全的風(fēng)險(xiǎn)[2~4],因而在小區(qū)域和人工作業(yè)困難地區(qū)快速獲取高分辨率影像具有明顯優(yōu)勢(shì)。隨著無(wú)人機(jī)硬件技術(shù)和高精度GNSS定位技術(shù)的發(fā)展,將高精度GNSS定位模塊應(yīng)用到無(wú)人機(jī)上,結(jié)合GNSS輔助空中三角測(cè)量技術(shù),不但可以有效減少像控點(diǎn)的數(shù)量甚至免像控,且可以大大提高無(wú)人機(jī)航測(cè)的精度[5]。田超等人的研究,表明拓普康天狼星Pro航空測(cè)圖系統(tǒng)提供了在無(wú)地面控制點(diǎn)條件下可全自動(dòng)生成DSM的一體化解決方案,且在影像地面分辨率優(yōu)于 5 cm時(shí),可滿足 1∶500測(cè)圖規(guī)范精度要求[6]。何秀慶利用天狼星無(wú)人機(jī)免像控技術(shù)進(jìn)行地形圖測(cè)量及精度分析,生產(chǎn)的DLG平面和高程中誤差均為 0.15 m,滿足 1∶500測(cè)圖精度要求[7]。這一系列研究均表明,在一定條件下,無(wú)人機(jī)航測(cè)可以滿足 1∶500大比例尺測(cè)圖精度要求。本文重點(diǎn)對(duì)影響無(wú)人機(jī)測(cè)圖精度的關(guān)鍵因素進(jìn)行分析,探討保證測(cè)圖精度的措施,并結(jié)合國(guó)產(chǎn)飛馬F300無(wú)人機(jī)航測(cè)系統(tǒng),進(jìn)行 1∶500比例尺成圖試驗(yàn)研究。
2 影響無(wú)人機(jī)測(cè)圖精度的關(guān)鍵因素分析
本文從影響無(wú)人機(jī)測(cè)圖精度的關(guān)鍵因素進(jìn)行分析,并探討提高成圖精度的有效措施。
2.1 影像質(zhì)量
影像質(zhì)量包括影像清晰度、ISO、影像地面分辨率等參數(shù)。影像清晰度越高,地物判讀越準(zhǔn)確,影像特征點(diǎn)提取和匹配更可靠,空三精度越高。影像清晰度與飛行時(shí)天氣狀況能見(jiàn)度直接相關(guān),要保證高的影像清晰度,應(yīng)避免霧、霾等天氣不佳的情況下飛行。此外,由于無(wú)人機(jī)處于高速運(yùn)動(dòng)中拍照,會(huì)帶來(lái)像點(diǎn)位移,像點(diǎn)位移會(huì)降低影像解析能力,影響判讀精度[8]。像點(diǎn)位移公式為:
δ=v×t/GSD
其中,δ為像點(diǎn)位移,v為飛機(jī)運(yùn)行速度,t為相機(jī)曝光時(shí)間,GSD為影像地面分辨率。為了減少像點(diǎn)位移,應(yīng)縮短曝光時(shí)間。規(guī)范規(guī)定像點(diǎn)位移一般不應(yīng)大于1個(gè)像素,最大不應(yīng)大于1.5個(gè)像素。在大比例尺測(cè)圖應(yīng)用中,為了保證影像的高解析度,根據(jù)經(jīng)驗(yàn),應(yīng)將像點(diǎn)位移控制在1/3像素[9,10]。目前,市面上的電動(dòng)固定翼無(wú)人機(jī)巡航速度一般為 18 m/s左右,假定設(shè)計(jì)地面分辨率為 5 cm,則為了控制像點(diǎn)位移,應(yīng)在保證影像曝光足夠的情況下,盡量縮短曝光時(shí)間,在本例中不超過(guò) 1/1080 s,通常設(shè)置為 1/1250 s。
ISO應(yīng)根據(jù)飛行時(shí)光照情況進(jìn)行調(diào)整,光照條件越好,ISO可設(shè)置越低。ISO值越高,影像噪點(diǎn)越多,建議ISO設(shè)置為320~600,當(dāng)光照條件不好時(shí),ISO值設(shè)置得過(guò)高,影像質(zhì)量也會(huì)差。因此,應(yīng)選擇光照條件好的時(shí)候進(jìn)行航拍,保證影像質(zhì)量。
影像地面分辨率與航高直接相關(guān),它們之間的關(guān)系如下式:
其中,H為航高,f為相機(jī)焦距,GSD為影像地面分辨率,μ為CCD像元大小。影像分辨率越高,判讀精度就會(huì)越高,在影像空三處理和測(cè)圖中精度越高,但是會(huì)降低航攝效率。根據(jù)規(guī)范要求, 1∶500航測(cè)法成圖要求航攝地面分辨率優(yōu)于 8 cm,為了同時(shí)兼顧成圖精度和航攝效率,根據(jù)經(jīng)驗(yàn), 1∶500無(wú)人機(jī)航測(cè)成圖時(shí),一般設(shè)計(jì)影像地面分辨率為 4 cm~5 cm。
2.2 飛行姿態(tài)
飛行姿態(tài)包括飛機(jī)航拍作業(yè)時(shí)的俯仰角、橫滾角和航偏角,即航攝影像的外方位角元素[11]。飛行姿態(tài)與飛機(jī)飛行狀態(tài)和飛行時(shí)風(fēng)速極大相關(guān)。在飛行器自身穩(wěn)定性較好的情況下,影響最大的就是風(fēng)。有風(fēng)時(shí)會(huì)導(dǎo)致飛機(jī)為了抵消風(fēng)的影響而作出相應(yīng)的反饋,飛機(jī)的姿態(tài)就會(huì)發(fā)生較大變化,尤其是風(fēng)向多變的情況下,飛機(jī)姿態(tài)更不穩(wěn)定,這樣容易引起航拍影像拍攝姿態(tài)角過(guò)大而導(dǎo)致重疊度不夠。重疊度不夠,影像匹配容易失敗,形成航攝漏洞或連接性不夠,且拍攝姿態(tài)角過(guò)大,容易造成影像畸變更大,帶來(lái)大的模型差。無(wú)人機(jī)大比例尺航測(cè)成圖應(yīng)用中,應(yīng)選擇穩(wěn)定的飛行平臺(tái),風(fēng)速過(guò)大或風(fēng)向多變的天氣情況下,不適宜航拍作業(yè)。風(fēng)速超過(guò)三級(jí),非緊急情況盡量不作業(yè)。
2.3 地面控制和機(jī)上POS
地面像控點(diǎn)布設(shè)的好壞對(duì)最終空三加密的精度起著至關(guān)重要的作用。傳統(tǒng)航測(cè)布點(diǎn)為區(qū)域網(wǎng)布點(diǎn)方案[12],參照規(guī)范要求的基線間隔和航線間隔布設(shè)平面和高程控制點(diǎn),像控點(diǎn)布設(shè)的密度和均勻性對(duì)平差的精度影響重大。GNSS輔助空三的引入可以有效減少像控點(diǎn)的數(shù)量且可以大大提高無(wú)人機(jī)航測(cè)的精度。在影像曝光點(diǎn)坐標(biāo)精度足夠高的情況下甚至可以免像控[13]。隨著衛(wèi)星導(dǎo)航定位技術(shù)的發(fā)展,定位設(shè)備可以做得足夠輕巧且精度高,可以與無(wú)人機(jī)進(jìn)行很好地結(jié)合。目前無(wú)人機(jī)裝配的差分系統(tǒng)一般包括地面基準(zhǔn)站和機(jī)上流動(dòng)站兩部分,差分解算的方式主要包括RTK實(shí)時(shí)差分解算和PPK后差分解算。飛馬F300無(wú)人機(jī)航攝系統(tǒng)同時(shí)裝配了RTK實(shí)時(shí)差分和PPK后差分系統(tǒng),二者進(jìn)行融合解算可以使影像曝光點(diǎn)坐標(biāo)精度達(dá)到 5 cm~10 cm。
2.4 畸變模型
目前多數(shù)無(wú)人機(jī)由于體型小、載荷有限,多搭載輕小型非量測(cè)普通相機(jī)作為影像獲取裝備,常用于無(wú)人機(jī)搭載的相機(jī)有SONY a7r、SONY黑卡、Nikon D810等,這類(lèi)非量測(cè)相機(jī)往往存在相機(jī)畸變大、焦距短、像幅小等問(wèn)題。而對(duì)于目前的硬件搭載水平一定的條件下,對(duì)測(cè)圖精度影響很大的就是相機(jī)畸變。如果相機(jī)畸變不能有效去除,會(huì)直接導(dǎo)致空三無(wú)法滿足精度要求、立體像對(duì)模型差大、接邊工作量增大,也難以滿足 1∶500比例尺測(cè)圖的需要。因此如何準(zhǔn)確地模擬相機(jī)畸變信息是解決無(wú)人機(jī)高精度立體測(cè)圖的一個(gè)關(guān)鍵因素。
像片中心畸變小,邊緣畸變大,常見(jiàn)的多項(xiàng)式畸變模型由k1、k2、k3、p1、p2、α和β組成[14],模擬相機(jī)的徑向畸變、切向畸變和像素的非正方形比例因子,滿足相對(duì)規(guī)則的相機(jī)畸變?nèi)コ坏鄶?shù)非量測(cè)相機(jī)畸變不規(guī)則。針對(duì)此特點(diǎn),飛馬機(jī)器人開(kāi)發(fā)了基于格網(wǎng)畸變的模型算法,能有效減小模型差等問(wèn)題,提高航測(cè)成圖精度。
格網(wǎng)畸變的原理是將相機(jī)成像CCD元件視作規(guī)則格網(wǎng)組成,每400×400像素作為一個(gè)格網(wǎng),逐塊格網(wǎng)模擬相機(jī)畸變。采用室內(nèi)亞毫米級(jí)高精度三維檢校場(chǎng),對(duì)相機(jī)進(jìn)行精密檢校,其格網(wǎng)畸變的獲取如下:
(1)使用平行光管進(jìn)行相機(jī)對(duì)焦,保證鏡頭無(wú)窮遠(yuǎn)對(duì)焦的準(zhǔn)確性。
(2)多片聯(lián)合檢校。在檢校場(chǎng)不同位置進(jìn)行影像的拍攝,并通過(guò)多片聯(lián)合檢校解算出準(zhǔn)確的格網(wǎng)畸變參數(shù),既保證檢校精度,又有效地避免了過(guò)擬合。格網(wǎng)畸變可準(zhǔn)確量化不規(guī)則相機(jī)的畸變信息,從而實(shí)現(xiàn)高精度數(shù)據(jù)成圖。飛馬機(jī)器人公司對(duì)該畸變模型進(jìn)行了充分的精度對(duì)比測(cè)試,表明該畸變模型精度明顯優(yōu)于傳統(tǒng)畸變處理結(jié)果,且其精度可提高一倍,有效地解決了非量測(cè)性相機(jī)畸變不規(guī)則無(wú)法應(yīng)用于高精度航測(cè)成圖的問(wèn)題。室內(nèi)檢校場(chǎng)和格網(wǎng)畸變模型示意如圖1、圖2所示。

圖1 室內(nèi)三維檢校場(chǎng)
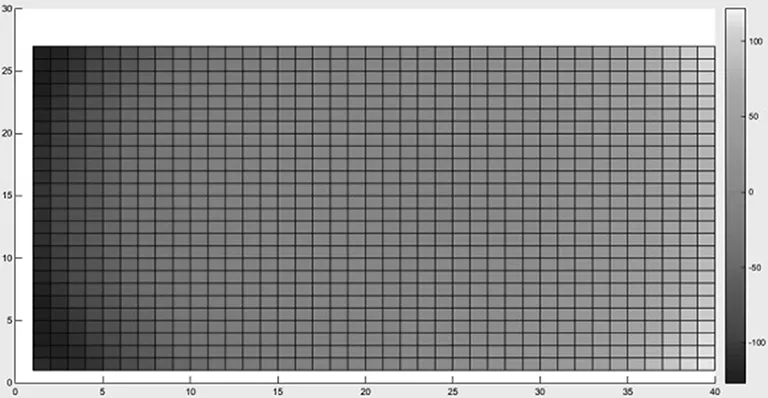
圖2 格網(wǎng)畸變模型示意圖
3 無(wú)人機(jī)1∶500比例尺測(cè)圖試驗(yàn)
3.1 飛行平臺(tái)和搭載傳感器
本研究中所用飛行平臺(tái)為飛馬F300電動(dòng)固定翼無(wú)人航攝系統(tǒng),機(jī)身采用超輕泡沫材料,采用手拋起飛和傘降的起降方式。無(wú)人機(jī)配備了RTK實(shí)時(shí)差分和PPK后差分系統(tǒng),支持GPS和北斗衛(wèi)星導(dǎo)航數(shù)據(jù),機(jī)上接收機(jī)采樣頻率高達(dá) 50 Hz,保證了很高的數(shù)據(jù)解算精度。飛行平臺(tái)主要性能參數(shù)如表1所示。

飛馬F300航攝系統(tǒng)主要性能參數(shù) 表1
本航攝系統(tǒng)搭載的航測(cè)模塊為SONY DSC-RX1R Ⅱ相機(jī),相機(jī)出廠前由廠家進(jìn)行格網(wǎng)畸變模型檢校提供使用。
3.2 測(cè)區(qū)概況
本研究中選取三個(gè)不同地形區(qū)域進(jìn)行試驗(yàn),三個(gè)測(cè)區(qū)概況如表2所示。
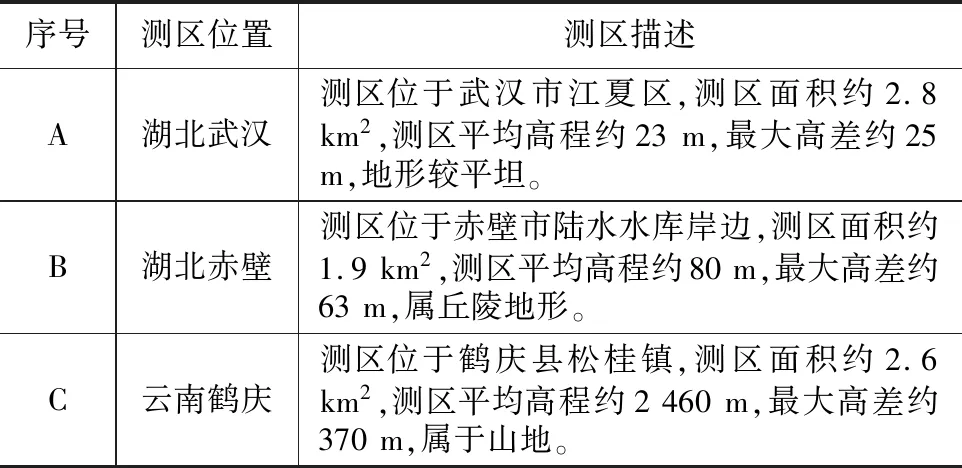
測(cè)區(qū)概況 表2
3.3 航空攝影數(shù)據(jù)獲取
根據(jù)三個(gè)測(cè)區(qū)地形情況設(shè)計(jì)航線,A和B測(cè)區(qū)一個(gè)架次飛行,C測(cè)區(qū)由于高差較大,根據(jù)實(shí)際地形情況,劃分為兩個(gè)架次變高飛行,兩架次航高相差 190 m,保證測(cè)區(qū)足夠重疊。在能見(jiàn)度高、光照條件好、風(fēng)速低于三級(jí)的天氣情況下獲取航拍影像。影像清晰、反差適中,無(wú)明顯噪點(diǎn)。獲取影像情況如表3所示,從表中可知,影像航向重疊度和旁向重疊度均大于65%和40%的要求[15],保證了高的重疊度,C測(cè)區(qū)屬于山區(qū)地形,落差大,航線設(shè)計(jì)時(shí)加大了旁向重疊度,保證強(qiáng)的連接性。影像姿態(tài)均較好,俯仰和橫滾角超過(guò)5°的影像數(shù)量較少。

影像獲取情況 表3
3.4 影像處理
數(shù)據(jù)獲取后分架次進(jìn)行整理,首先利用差分解算模塊進(jìn)行PPK/RTK融合解算,獲得精確的曝光點(diǎn)坐標(biāo),然后基于格網(wǎng)畸變模型對(duì)原始影像進(jìn)行初始畸變糾正,之后在智拼圖模塊按測(cè)區(qū)建立工程,進(jìn)行空三加密解算。A測(cè)區(qū)地形平坦,且影像分辨率很高,直接進(jìn)行免像控空三解算。B、C測(cè)區(qū)采用四個(gè)角點(diǎn)布設(shè)平高控制點(diǎn),GNSS輔助空三解算,解算后像控點(diǎn)殘差為:B測(cè)區(qū)平面中誤差為 0.05 m,高程中誤差為 0.06 m,C測(cè)區(qū)平面中誤差為 0.06 m,高程中誤差為 0.08 m,滿足《數(shù)字航空攝影測(cè)量空中三角測(cè)量規(guī)范》(GBT 23236-2009)中1∶500比例尺空三加密精度要求。
3.5 模型精度檢查
空三加密后,將加密成果導(dǎo)出,在數(shù)字?jǐn)z影測(cè)量工作站導(dǎo)入,恢復(fù)立體模型。采用GNSS RTK實(shí)測(cè)采集的外業(yè)數(shù)據(jù),導(dǎo)入模型進(jìn)行平面位置和高程精度檢查。選取的平面檢查點(diǎn)主要為提前布設(shè)的標(biāo)志、道路標(biāo)線、規(guī)則人工地物角點(diǎn)等,高程檢查點(diǎn)為道路、農(nóng)田、荒地等裸露區(qū)域的高程散點(diǎn)。
為了驗(yàn)證格網(wǎng)模型的精度,本次試驗(yàn)還將傳統(tǒng)畸變模型和格網(wǎng)畸變模型的空三成果分別恢復(fù)立體進(jìn)行模型精度檢查和模型接邊差的比較。三個(gè)測(cè)區(qū)的檢查點(diǎn)數(shù)量和兩種畸變模型下檢查精度情況如表4所示。

兩種畸變模型下模型精度檢查統(tǒng)計(jì) 表4
所有檢查點(diǎn)在兩種空三成果模型上最大接邊差均值統(tǒng)計(jì)如表5所示。

兩種畸變模型下檢查點(diǎn)最大模型接邊差統(tǒng)計(jì) 表5
從以上表中可看出,采用格網(wǎng)畸變模型后,模型精度均得到了很大提高,尤其是高程精度,提高了一倍多,且最大模型接邊差均縮小了。采用格網(wǎng)畸變后立體模型精度明顯優(yōu)于傳統(tǒng)畸變模型結(jié)果且三個(gè)測(cè)區(qū)檢查點(diǎn)平面和高程中誤差均滿足《基礎(chǔ)地理信息數(shù)字成果1∶500 1∶1000 1∶2000數(shù)字線劃圖》(CH/T9008.1-2010)1∶500比例尺DLG成果平面位置中誤差和高程中誤差要求。
4 結(jié) 語(yǔ)
本文對(duì)無(wú)人機(jī)1∶500比例尺測(cè)圖的關(guān)鍵影響因素進(jìn)行分析,討論保證測(cè)圖精度的措施,并基于飛馬F300無(wú)人機(jī)航攝系統(tǒng)(裝配高精度RTK/PPK定位模塊),選取三個(gè)不同地形試驗(yàn)區(qū),進(jìn)行1∶500比例尺成圖生產(chǎn)試驗(yàn),結(jié)果表明在成像條件好,影像地面分辨率優(yōu)于5cm,風(fēng)速小、飛行姿態(tài)好,影像重疊度高的情況下,在無(wú)控或稀少控制點(diǎn)情況下,GNSS輔助空三可以達(dá)到1∶500大比例尺測(cè)圖精度要求,同時(shí)也表明了文中應(yīng)用的格網(wǎng)模型具有很高的精度,可以有效去除影像畸變,減小模型差。山區(qū)由于地形起伏大,高程誤差相比平坦地區(qū)會(huì)增大,但仍滿足規(guī)范要求。對(duì)于山區(qū),可以通過(guò)提高重疊度、分區(qū)塊變高航飛的方式保證成圖精度。無(wú)人機(jī)航攝系統(tǒng)應(yīng)用于大比例尺測(cè)圖,相對(duì)傳統(tǒng)全野外測(cè)量方式,可以大大減少外業(yè)測(cè)量工作量,極大提高工作效率,具有重要實(shí)際意義。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 城市勘測(cè)的其它文章
- 2019長(zhǎng)江中游城市群測(cè)繪地理信息發(fā)展戰(zhàn)略論壇暨華東地區(qū)、中南地區(qū)城市勘測(cè)管理與學(xué)術(shù)交流會(huì)在合肥召開(kāi)
- 中國(guó)城市規(guī)劃協(xié)會(huì)城市勘測(cè)專業(yè)委員會(huì)2019年年會(huì)
- 中規(guī)協(xié)城勘專委會(huì)西北西南片區(qū)召開(kāi)2019年城市勘測(cè)單位發(fā)展研討會(huì)
- 綜合物探法在常州軌道交通2號(hào)線的應(yīng)用
- 武漢臨江地區(qū)深基坑工程中群井抽水試驗(yàn)的應(yīng)用
- 抗差卡爾曼濾波在危房監(jiān)測(cè)中的應(yīng)用