一種仿章魚腕足柔性模塊的設計與運動控制
2020-01-15 07:23:54,,,
機械與電子 2020年1期
,,,
(北京空間飛行器總體設計部空間智能機器人系統技術與應用北京市重點實驗室,北京 100094)
0 引言
連續體機器人與具有剛性鉸鏈的傳統機器人不同,它主要由柔性材料制造而成,因此可以安全地與人進行互動,并適應各種非結構的復雜環境。
連續體機器人主要是由模塊串聯而成,所以模塊的性能直接決定了連續體機器人的性能。目前模塊驅動方式主要采用拉線和氣動肌肉,美國Clemson大學的仿象鼻機器人[1-3]結構上分為4段,每一段采用四線驅動實現2個自由度運動。Walker與Jones的研究小組[4-6]還研制了一種仿章魚腕足的連續體機器人OctArm。該機器人采用人工氣動肌肉為驅動裝置。人工氣動肌肉由外部提供的壓縮空氣驅動,它可以提供很大的力量,而重量卻比較小[7]。
模塊采用傳統驅動機構,驅動力大,有成熟的控制方案,但驅動機構體積大,推重比低,不利于機器人整體的輕量化和小型化。而采用SMA記憶合金,EAP等智能材料作為驅動器就可以克服傳統驅動器的缺點,功率密度高,響應速度快[8-9]。
采用智能材料驅動器的模塊形狀檢測較為困難。目前檢測模塊主要采用視覺、智能材料、壓阻材料等方法。采用視覺測量有單目[10]和雙目[11],但環境適應性差,僅限于實驗室。基于智能材料的檢測上,主要有PVDF[12]和IPMC[13]材料,但僅限于一維運動測量。SMA合金彈簧作為一種智能材料,理論上可以通過測量SMA的電阻變化來控制SMA的拉伸和收縮,但SMA的電阻值不光與溫度相關,還與載荷的變化相關,實際應用有較大的難度。針對上述問題,美國麻省理工學院提出了分段二進制控制方法[14],但控制精度較差。
針對上述中驅動和控制方式出現的不足,在此提出使用SMA彈簧作為驅動器,利用線性霍爾傳感器測量拉伸長度的變化實現對柔性模塊閉環控制,并通過建立柔性模塊的壓縮數學模型提高對柔性模塊彎曲角和旋轉角控制精度。并組裝柔性機械臂驗證多節驅動器協調工作能力。
1 柔性模塊結構
所設計的柔性模塊如圖1所示。
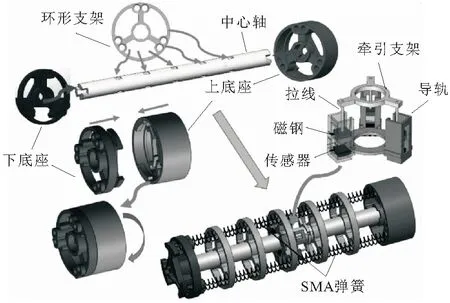
圖1 柔性驅動器模塊的結構示意
為讓軟膠的形狀符合圖1中的形狀結構,用3D打印機打印出樹脂材料的中心軸,再通過硅膠澆筑出中心軸的陰模,然后注入2種液體的混合物等待其硬化。中心軸上的凹槽為定位槽,用于定位環形支架,首尾的凹槽用于定位上下底座的位置。環形支架由3D打印機打印而成,支架周圍的6個圓孔主要用于約束SMA彈簧的收縮拉伸運動,以及3個方向的SMA彈簧的相對位置。上下底座是用于固定SMA彈簧的基座,由于柔性模塊還需要通過串聯組成柔性機械臂,所以上下底座還設計有能相互連接固定的結構。由圖1可以看出,上下底座都有環形溝槽,只需要連接上下底座,然后旋轉就可以固定前后2段柔性模塊。為了測量柔性模塊的彎曲角和旋轉角,模塊上裝有1組傳感器。傳感器由上下2部分構成,其中牽引支架通過拉線拉動3個方向上的磁鋼上下運動,磁鋼的運動被導軌限制,讓磁鋼和傳感器之間只有豎直方向的位移,沒有旋轉運動。
2 柔性模塊運動學建模
通常模塊的運動學建模都是假設模塊不發生軸向的壓縮,但在實際上中心軸的硬度不高,軸向壓縮是不可避免的。當模塊彎曲時軸向也受力,模塊會被壓縮,導致3個方向的拉伸長度會隨著彎曲角和壓縮量共同作用而變化。所以拉伸長度變化和彎曲角變化的關系不具有唯一性。
在壓縮狀態建模,先考察柔性模塊不可壓縮狀態。假設:柔性模塊彎曲曲線為圓弧;柔性模塊不可壓縮。沿逆時針方向,方向1位于旋轉角為0°的方向,方向2位于旋轉角為120°的方向,方向3位于旋轉角為240°的方向。如圖2所示。
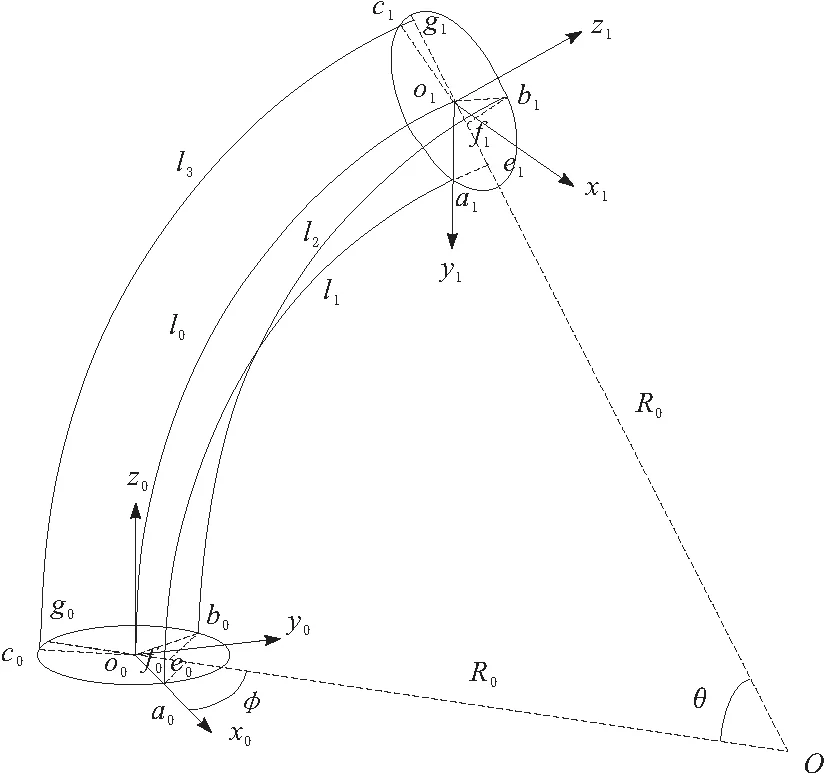
圖2 柔性模塊彎曲示意
l1為方向1拉伸長度;l2為方向2拉伸長度;l3為方向3的拉伸長度;r為3個方向上霍爾傳感器與通過腕足中軸線的分度圓上的距離;θ為腕足彎曲角;φ為彎曲方向角。當彎曲角θ=0°時,l1=l2=l3=l0。當彎曲角θ=0°時,關節變量θ,φ和3個方向的長度變化量之間的關系為
(1)
兩邊同除以r可以得到
(2)
即彎曲角θ和旋轉角φ分解成0°,120°和240°方向的彎曲角δj(j=1,2,3)。而Δlhj(j=1,2,3)和δj(j=1,2,3)的關系式為
(3)
由式(1)可以得到
Δl1+Δl2+Δl3=0
(4)
由式(4)可知:在不發生壓縮的狀態下,3個方向的拉伸和壓縮距離相加等于零。
由于柔性模塊各處曲率相同,所以通過測量柔性模塊某一段的長度變化量可以反映出柔性模塊整體的變化,由式(3)同理可得
Δlh1+Δlh2+Δlh3=0
(5)
而Δl和Δlh的關系式為
Δl=kΔlh
(6)
假設彎曲曲線為圓弧,考察霍爾傳感器和磁鋼的距離變化同時發生彎曲和壓縮情況。如圖3所示,初始狀態3個方向的霍爾傳感器和磁鋼距離都為lh0。先做不可壓縮彎曲變形,讓彎曲角從0°變為θh,3個方向磁鋼和霍爾傳感器距離變化量為Δlhj(j=1,2,3)。然后讓磁鋼和霍爾傳感器沿軸向發生壓縮量為Δlhs的變化時,3個方向的實際距離變為lh1,lh2和lh3,彎曲角仍為θh。
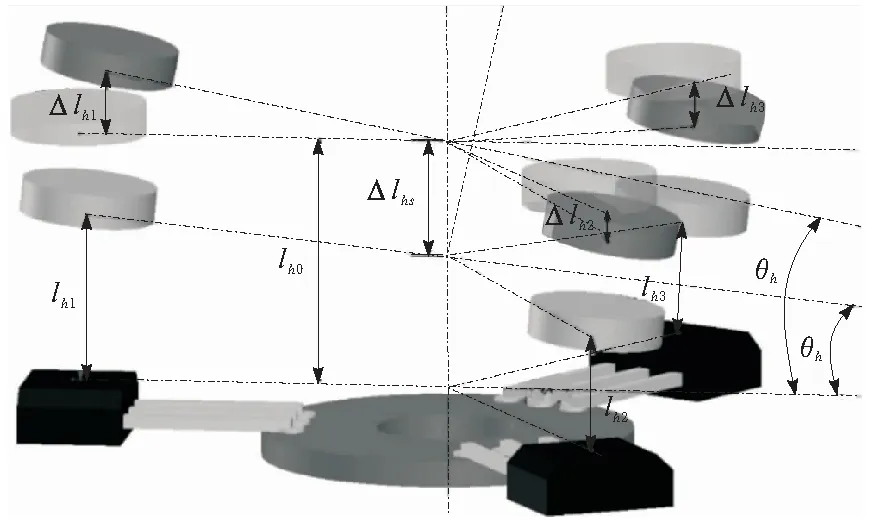
圖3 壓縮狀態示意
3個方向上距離變化關系式為
(7)
聯立式(5)和式(7)可得
(8)
聯立式(7)和式(8)可得
(9)
由式(8)可得到彎曲角相同時無壓縮狀態下3個方向的距離變化量Δlhj。在無壓縮狀態下排除壓縮量的干擾。由式(3)和式(6)可知:Δlhj和δj具有一一對應的關系,Δlhj通過關系式δ=flδ(Δlh)求出δj。
3 柔性模塊控制系統和原理
3.1 控制系統組成
上位機通過串行接口向單片機發送目標位置的電壓信號。單片機通過AD口檢測霍爾傳感器的模擬電壓信號,然后與目標電壓信號比較,并通過PID運算向3個方向的加熱驅動器發送PWM信號。加熱驅動控制器控制加熱SMA彈簧,使其相變收縮拉送柔性模塊彎曲運動。控制系統和柔性模塊連接如圖4所示。

圖4 控制系統示意
3.2 控制原理
控制框圖如圖5所示。

圖5 系統控制框圖
首先,上位機將柔性模塊的目標彎曲角θ和旋轉角φ轉換成3個方向的目標彎曲角δj(j=1,2,3)控制器把當前3個方向數字電壓信號Hj(j=1,2,3)發送給上位機。上位機將Hj轉變為霍爾傳感器和磁鋼之間的距離lhj,通過式(9)算出無壓縮的距離變化量Δlhj(j=1,2,3)。然后通過Δlhj和δj關系式求出3個方向當前的彎曲角。接著比較目標彎曲角和當前彎曲角的差值,改變給定目標數字電壓信號H并發送給控制器。控制器將目標給定H與通過AD口接收電壓信號Hj進行對比,通過PID產生PWM波控制加熱控制器加熱3個方向SMA彈簧,SMA彈簧受熱發生相變收縮實現腕足彎曲和旋轉到達相應的彎曲角θ和旋轉角φ。
為了得到霍爾傳感器和和磁鋼距離Δlhj,首先必須通過實驗來校正霍爾傳感器建立起數字電壓值Hhj和lhj關系式,以及Δlhj和δj的關系式,這樣才能求出δj。
4 實驗測量
4.1 霍爾傳感器校正
考察霍爾傳感器讀數和距離變化之間的關系,通過霍爾傳感器重新校正可得,如圖6所示。

圖6 數字電壓讀數和距離關系
當霍爾傳感器和磁鋼距離發生變化時,霍爾傳感器輸出電壓隨之變化,通過控制器的AD口(讀取電壓范圍0~5 V,輸出0~1 024)轉變為數字電壓信號。X軸為霍爾傳感器和磁鋼的距離lh;Y軸為數字電壓信號H。用最小二乘法擬合可以求出lh和H的關系式為
lh=fHl(H)
(10)
4.2 彎曲角測量原理
視覺測量裝置如圖7所示。

圖7 視覺測量裝置
以方向1測量為例,讓工業相機垂直于方向1的彎曲平面(旋轉角為0°的平面)拍攝。在MATLAB中對拍攝圖像進行處理測量得到彎曲角δ1,并同時記錄下3個方向的霍爾傳感器的數字電壓信號Hj(j=1,2,3),聯立式(9)和式(10)計算出方向1在不可壓縮狀態下霍爾傳感器部分距離的變化量Δlh1。
4.3 測量原理
假設腕足關節的彎曲為圓弧彎曲,向左彎曲為正向彎曲,向右彎曲為反向彎曲。實驗目的是通過測量圖像得到腕足的彎曲角。如圖8和圖9所示,首先要找到腕足關節中軸線的下端點O0和上端點O1。由于下端點O0為固定點,可以通過手動選取的方式找到,而上端點O1會隨著腕足的彎曲,位置會發生變化,且上端點不便于放置追蹤點。所以在腕足的上端部的兩側分別放置2個追蹤點。讓上端點O1位于這2個追蹤點的幾何中心點連線的中點上,而2個追蹤點的幾何中心可以通過計算機視覺追蹤得到。

圖8 腕足實物的圖像

圖9 測量原理
得到上端點O1后,利用圓弧的幾何關系求出彎曲角δ1。連接O0和O1,求出向量O0O1和O0OR的夾角β,即腕足彎曲圓弧對應的弦長和水平線的夾角。ΔORO1O0為等腰三角形,所以彎曲角δ1=360-2β。通過測量得到的彎曲角δ1和上下端點,可以計算出腕足中軸線彎曲的理論弧線,用于對比腕足彎曲的實際弧線。
4.4 數據分析
讓腕足往正反方向彎曲,進行10次彎曲。記錄彎曲過程中霍爾數字信號H和對應的彎曲角θ。如圖10所示。
由圖10可知,由于向正反方向彎曲時,3個方向的SMA彈簧交替拉伸和收縮,腕足關節會發生不同程度的壓縮。所以正反方向彎曲曲線不重合,霍爾數字信號和彎曲角的對應關系不具有唯一性。
再分析霍爾傳感器和磁鋼的無壓縮狀態拉伸距離Δlh和彎曲角δ1的關系,如圖11所示。

圖10 電壓數字信號H1
和彎曲角δ1的關系 圖11 無壓縮Δlh和彎曲角δ1的關系
在無壓縮狀態下Δlh和彎曲角δ1應該是唯一對應關系,正反方向的曲線應該重合的。但由圖11可以看出實際與理論分析結果并不相同。產生這種不重合的原因可能是:腕足在彎曲時并非理想狀態的圓弧。
正反彎曲最大角度差3°,對于軟體機器人來說,這種誤差在可接受的范圍內。把正反彎曲記錄數據共同作為參考點擬合出方向1的平均關系曲線和關系式為
δ1=flδ(Δlh1)
(11)
同理3個方向的關系式可以表示為
(12)
5 柔性機械臂實驗
柔性模塊作為一個獨立驅動單元,已經實現空間內運動軌跡跟蹤。而柔性機械臂是由6節柔性模塊串聯而成,通過6節柔性模塊的耦合運動后產生不同單節模塊的運動形式。所以通過讓柔性機械臂做出各種形式運動和抓取物體,來驗證控制系統對柔性機械臂控制的有效性,以及柔性機械臂運動的靈活性。
5.1 柔性機械臂蜷縮
圖12為柔性機械臂空氣中平面運動實驗結果。6節柔性機械臂垂直懸掛在支架上,每節初始彎曲角度為0°;圖12a中設定第1節彎曲角為45°,實際誤差不大,由于變形應力的傳遞,第2節和第3節有輕微彎曲;圖12b中設定第1節和第2節彎曲角為60°;圖12c中設定第1節和第2節彎曲角為60°,第3節彎曲角為-45°,第4節為0°,第5節為45°,第6節為0°,可以看出第4節能夠保持末端彎曲角為0°但是整節發生S型變形,第6節在柔性機械臂自身重力作用下發生較大彎曲;圖12d中調整第1節彎曲角為0°;圖12e和圖12f為整體的冷卻恢復過程。
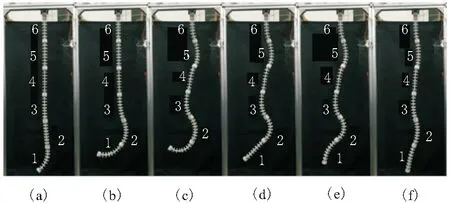
圖12 柔性機械臂空氣中平面運動
5.2 柔性機械臂水中運動
圖13為柔性機械臂水面運動實驗結果。

圖13 柔性機械臂水面運動實驗結果示意
圖13中柔性機械臂從初始位置開始沿著預定運動軌跡,最后到達最終目標位置。初始狀態柔性機械臂的第1節彎曲角為100°,第2節彎曲角為70°,第3節50°,第4節30°,第5節10°,第6節-10°。首先保持第6節角度不變,其他5節開始逐漸減少彎曲角,伸展到第6張圖的狀態,然后第1節和第2節開始反向彎曲運動,最后的運動依靠第6節,其他5節保持原有狀態不變。第12張圖重新處于蜷縮狀態,并到達目標點。
6 結束語
設計一種由SMA彈簧驅動的柔性模塊,通過霍爾傳感器可以實時獲取完全解讀和彎曲方向。使用簡單的PID和壓縮數學模型,可以讓柔性模塊實現高精度的實時變形和二維運動。通過組合多節柔性驅動模塊形成柔性機械臂。實驗結果表明,此柔性機械臂可以根據預定目標軌跡進行運動,顯示它相對于剛性機械臂有更大的運動靈活性。這種柔性機械臂為機器人的工程應用提供了更多亮點,例如在易碎物體,人工服務以及復雜障礙物環境中的移動。未來的工作將包括在執行更復雜的操縱任務時探索多段操縱器的性能,以及檢測載荷的可行性。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
