一種機電一體離合器執(zhí)行器設(shè)計
2020-01-16 09:20:24楊慧超
汽車零部件 2019年12期
楊慧超
(1.同濟大學(xué),上海 200092;2.上海汽車變速器有限公司,上海 201807)
0 引言
現(xiàn)有的汽車離合器執(zhí)行系統(tǒng)大多在手動變速器(MT)、自動變速器(AT)、電控機械自動變速器(AMT)、雙離合器變速器(DCT)等變速器上應(yīng)用。其中MT對駕駛員操作技術(shù)要求高,且操作強度大,需要與加速踏板、制動踏板、換擋桿操作進行配合,長時間駕駛?cè)菀灼冢@對行車安全性和舒適性帶來一定的影響。而AT、AMT、DCT主要使用液壓系統(tǒng),以液壓油推動活塞或分離叉,帶動分離軸承通過膜片彈簧壓緊或分離離合器壓盤與離合器從動盤,實現(xiàn)離合器結(jié)合或分離動作,其技術(shù)成熟,但系統(tǒng)效率較低,清潔度要求高,結(jié)構(gòu)尺寸優(yōu)化難度較大。目前國外廠商已有部分機電一體離合器執(zhí)行系統(tǒng)產(chǎn)品投放市場,但成本較高,性能存在不穩(wěn)定性。基于目前離合器執(zhí)行器存在的問題,本文作者研究的主要方向是設(shè)計一種低成本、高效率的離合器執(zhí)行器。
1 傳統(tǒng)的離合器執(zhí)行機構(gòu)原理及組成
傳統(tǒng)MT使用液壓式操縱機構(gòu),通過踏板連接的連桿,推動離合器主缸內(nèi)的液壓油,從而推動離合器副缸的推桿或CSC(Concentric Slave Cylinder)活塞,實現(xiàn)離合器的結(jié)合與分離[1],如圖1所示。
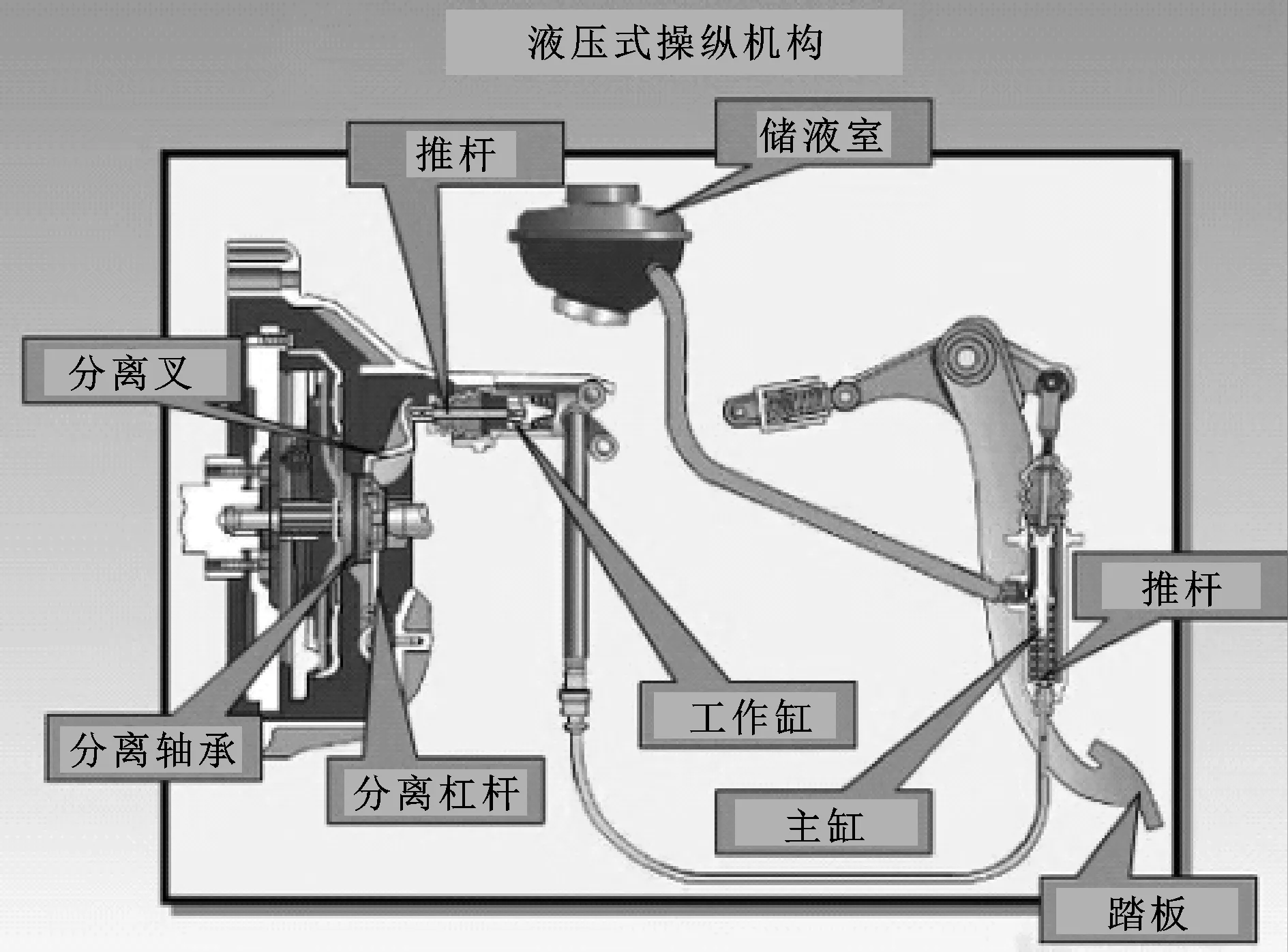
圖1 手動變速器液壓式操縱機構(gòu)
傳統(tǒng)AT、AMT、DCT通過油泵泵油,由電磁閥分配液壓油經(jīng)過油路,推動活塞壓緊或分離壓盤與從動盤;推動分離叉,帶動分離軸承通過膜片彈簧壓緊或分離離合器壓盤與離合器從動盤,實現(xiàn)離合器結(jié)合或分離動作[2],如圖2所示。
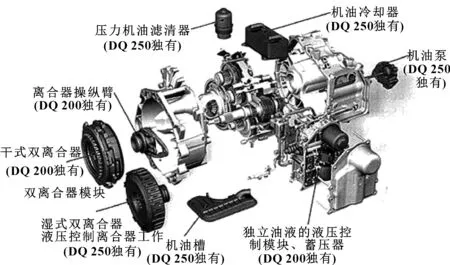
圖2 雙離合變速器液壓式操縱機構(gòu)
2 傳統(tǒng)離合器執(zhí)行機構(gòu)的不足
傳統(tǒng)MT的離合器執(zhí)行器需要與加速踏板、制動踏板、換擋桿操作進行配合,長時間駕駛?cè)菀灼?離合器摩擦片發(fā)生磨損時,踏板行程會發(fā)生偏移,人工操縱難以實現(xiàn)精確控制,將導(dǎo)致離合器磨損加劇。當(dāng)離合器摩擦片即將達到壽命極限時,會發(fā)生離合器結(jié)合不穩(wěn)定的情況,造成整車抖動或動力性下降,影響駕駛體驗。
傳統(tǒng)AT、AMT、DCT使用的液壓系統(tǒng),為了實現(xiàn)精確控制,電磁閥的制造精度較高、配合間隙小,因此對零件清潔度的要求高,零件制造難度大。布置閥板油路時需要綜合考慮離合器控制油路與換擋油路,設(shè)計難度大,結(jié)構(gòu)相對復(fù)雜,占用體積較大,因此會造成執(zhí)行機構(gòu)成本較高。
3 機電一體式離合器執(zhí)行器設(shè)計方案
針對傳統(tǒng)離合器執(zhí)行器的問題,開發(fā)一種機電一體式離合器執(zhí)行器,這種離合器執(zhí)行機構(gòu)主要由控制系統(tǒng)、驅(qū)動機構(gòu)、執(zhí)行機構(gòu)及其他元件組成。兩套機電一體式離合器執(zhí)行器組合使用,可用于驅(qū)動DCT的雙離合器,其系統(tǒng)組成如圖3所示。
驅(qū)動機構(gòu)包括:電動機、傳動齒輪副、絲桿螺母副和主液壓缸。電動機的旋轉(zhuǎn)運動通過齒輪副減速增扭及絲杠螺母副運動轉(zhuǎn)換,變?yōu)橹饕簤焊谆钊闹本€運動。

圖3 機電一體式離合器執(zhí)行器系統(tǒng)組成
執(zhí)行機構(gòu)包括:主液壓缸活塞、內(nèi)外CSC(用于AMT時可使用單缸CSC)、內(nèi)外離合器(用于AMT時可使用單離合器),主液壓缸活塞的運動通過油液傳遞至內(nèi)外CSC,分別執(zhí)行內(nèi)外離合器打開、閉合及滑磨的動作。
控制系統(tǒng)主要包括以下部件:TCU、壓力傳感器、位移傳感器及目標(biāo)磁鐵。TCU根據(jù)判定條件向電機發(fā)出轉(zhuǎn)動信號,位移傳感器反饋運動終止位置,壓力傳感器反饋執(zhí)行壓力。通過自學(xué)習(xí)找到離合器的結(jié)合點,通過算法計算進行離合器的準(zhǔn)確控制。
其他元件包括:支撐軸承,排氣用的排氣閥、補油裝置、絲杠防轉(zhuǎn)銷等,實現(xiàn)排除油液中空氣、補償油液損失、防止絲杠周向轉(zhuǎn)動等功能。
這種新型的機電一體式離合器執(zhí)行器的系統(tǒng)組成元件少、結(jié)構(gòu)簡單,簡化了液壓系統(tǒng)油路,也減少了電磁閥的使用。將此模塊在變速器總成上減少的占用體積,應(yīng)用于AMT、DCT上時,可降低對零件清潔度的要求,也降低了系統(tǒng)集成難度,有利于控制成本。
這種新型離合器執(zhí)行器的控制系統(tǒng)可以讀取壓力傳感器及位移傳感器的信號,從而診斷實際工作狀態(tài)是否符合設(shè)定值,圖4為其控制邏輯圖。
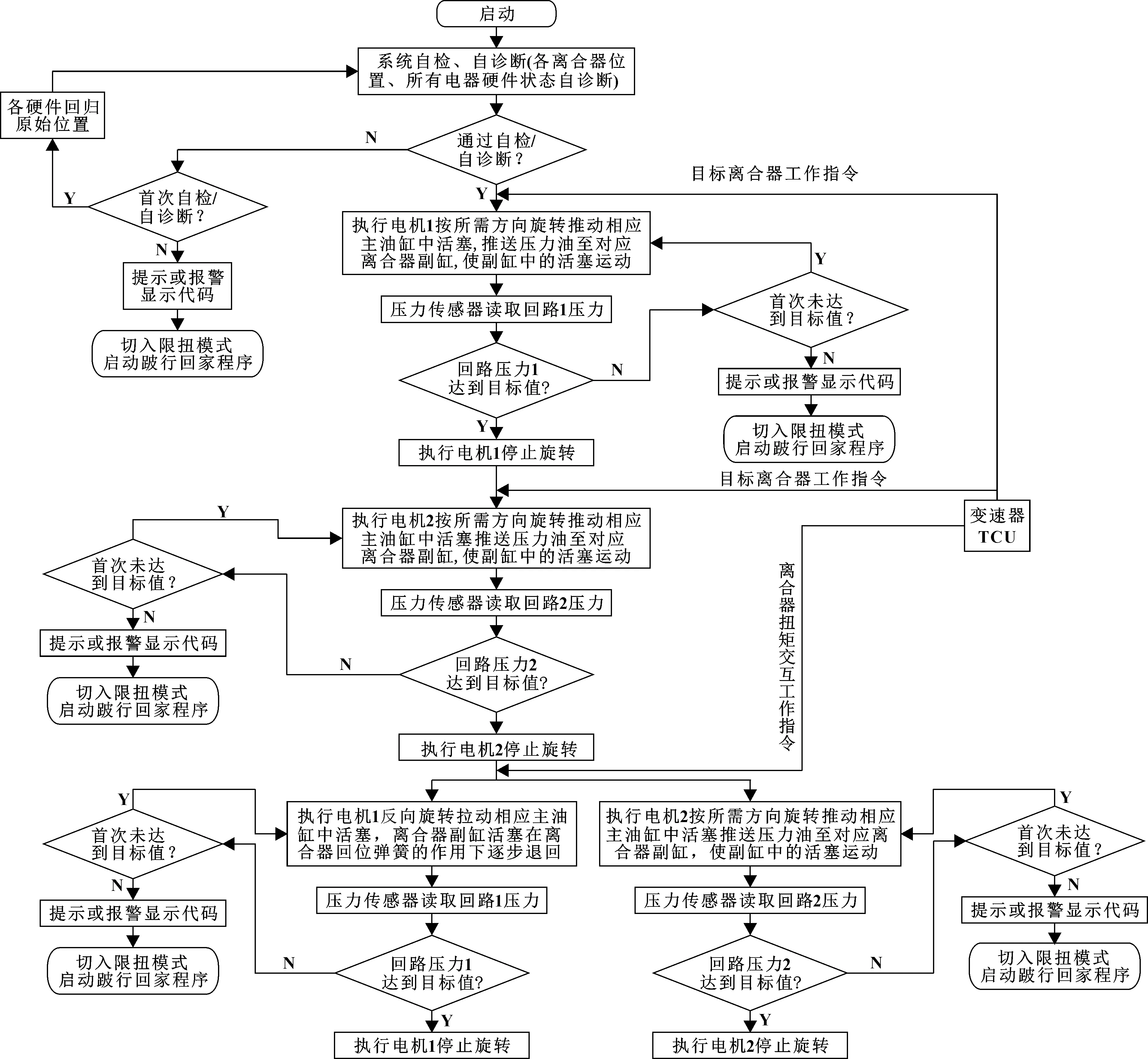
圖4 系統(tǒng)控制邏輯
4 設(shè)計參數(shù)匹配優(yōu)化
為滿足系統(tǒng)功能需求,離合器執(zhí)行系統(tǒng)的設(shè)計參數(shù)需要依據(jù)被執(zhí)行件(CSC及離合器)的參數(shù)進行匹配設(shè)計。
4.1 匹配的CSC需求參數(shù)
匹配的CSC需求參數(shù),如表1所示。
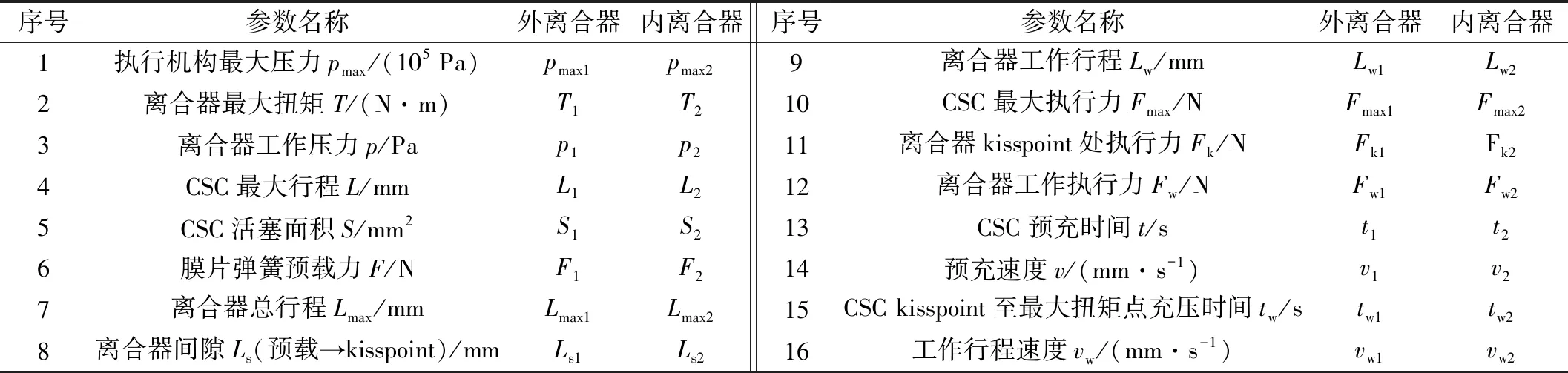
表1 匹配CSC參數(shù)
4.2 絲杠螺母參數(shù)計算
回轉(zhuǎn)運動轉(zhuǎn)化為直線運動時效率:
η1=(0.95~0.99)tanλ/tan(λ±ρ′)[3]
其中:λ=arctanSd/(πd2)≤ρ′;
ρ′=arctanf/(cosα/2)
式中:λ為螺紋升角;ρ′為當(dāng)量摩擦角;Sd為導(dǎo)程;f為摩擦因數(shù);d2為螺紋中徑;支撐效率為0.95~0.99。
滿足容許載荷的前提下,選直徑小、效率高的絲杠螺母。
4.3 電機選型
(1) 驅(qū)動功率計算
空行程輸出功率:P1=Fk1v1;P2=Fk2v2
工作行程輸出功率:Pw1=Fw1v1;Pw2=Fw2v2
取輸出功率大的離合器進行計算(以外離合器為例),工作行程驅(qū)動功率:
其中:η2為機械效率;η3為電機效率。
根據(jù)功率需求,選擇合適的執(zhí)行電機功率。
(2)主液壓缸活塞直徑與CSC直徑比的選擇

(3) 需求扭矩計算
空行程需求推力:
FN1=2πη1TN1/Sd,F(xiàn)N1≥Fk1/Y1
則需求扭矩TN1≥Fk1Sd/(2πη1Y1)
工作行程需求推力:
FNw1=2πη1TNw1/Sd,F(xiàn)Nw1≥Fw1/Y1
則TNw1≥Fw1Sd/(2πη1Y1)
根據(jù)扭矩需求及電機輸出扭矩特性,選擇合適的減速比。
4.4 齒輪副設(shè)計
(1)按活塞空行程移動速度預(yù)選減速比
(2) 確定實際減速比


(3) 驗算空行程預(yù)充時間


4.5 傳感器選擇及其他細節(jié)設(shè)計
(1) 依據(jù)執(zhí)行機構(gòu)工作壓力計選擇合適的壓力傳感器pN1=FNw1/Sz,pN1≤pmax1。
(2) 依據(jù)CSC最大行程L選擇合適的位移傳感器。
(3)依據(jù)需求設(shè)計補油壺、油管等附件。
4.6 功能演示模型搭建
所有功能模塊設(shè)計完成后,即可進行功能演示模型的搭建,如圖5所示;完成模型搭建,檢查分析并制造試驗樣件,如圖6所示,即可進行功能測試。
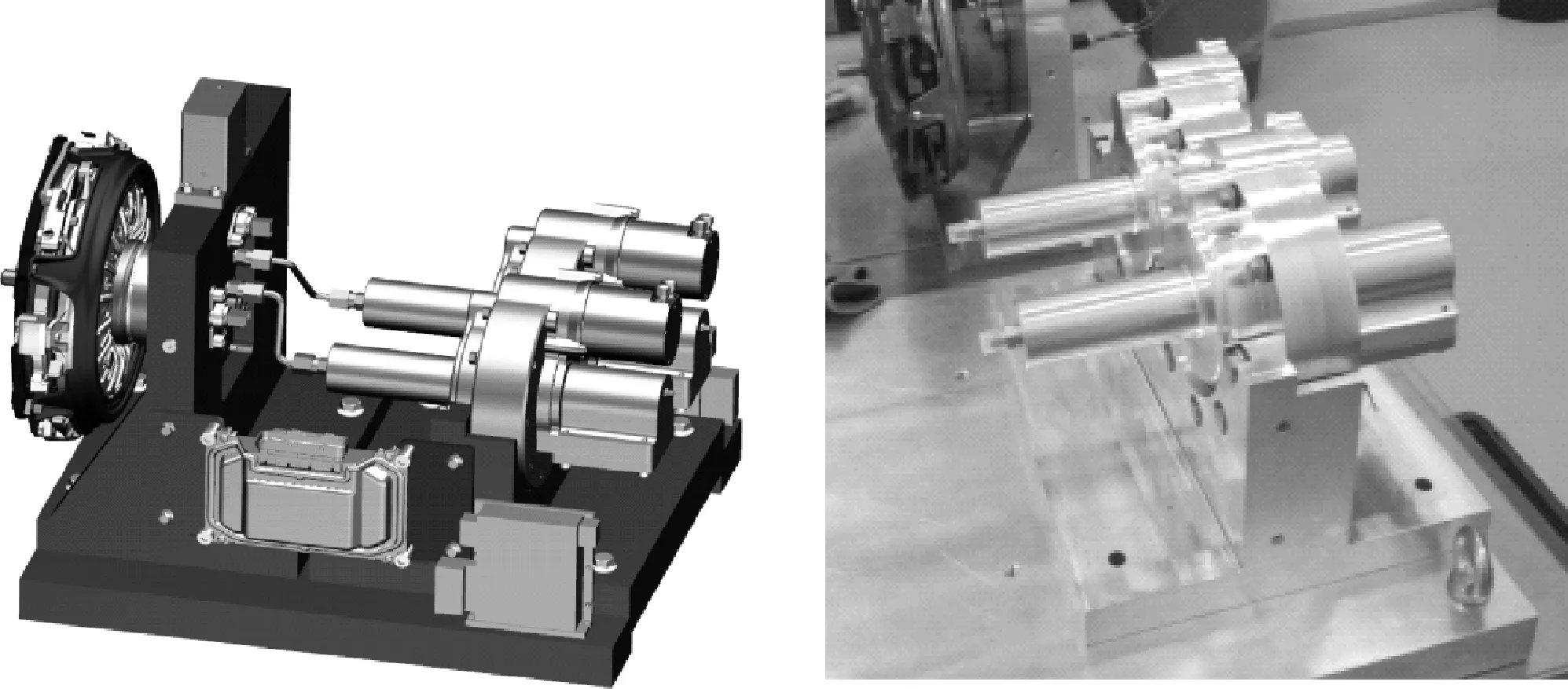
圖5 功能演示模型 圖6 試驗樣件
5 功能測試驗證
對試驗樣件進行功能測試,確認(rèn)是否滿足功能需求。
(1) 執(zhí)行機構(gòu)最大驅(qū)動力驗證
試驗樣件的傳感器輸出電壓-壓力特性曲線如圖7所示。

圖7 壓力傳感器輸出曲線
使驅(qū)動電機運動至行程末端,傳感器輸出電壓約為3.8V,進行油壓換算,試驗測試油壓不小于Fmax1。因此試驗樣件滿足CSC最大執(zhí)行力需求。
(2)執(zhí)行機構(gòu)位移驗證
為試驗樣件選取的位移傳感器占空比-位移特性曲線如圖8所示。
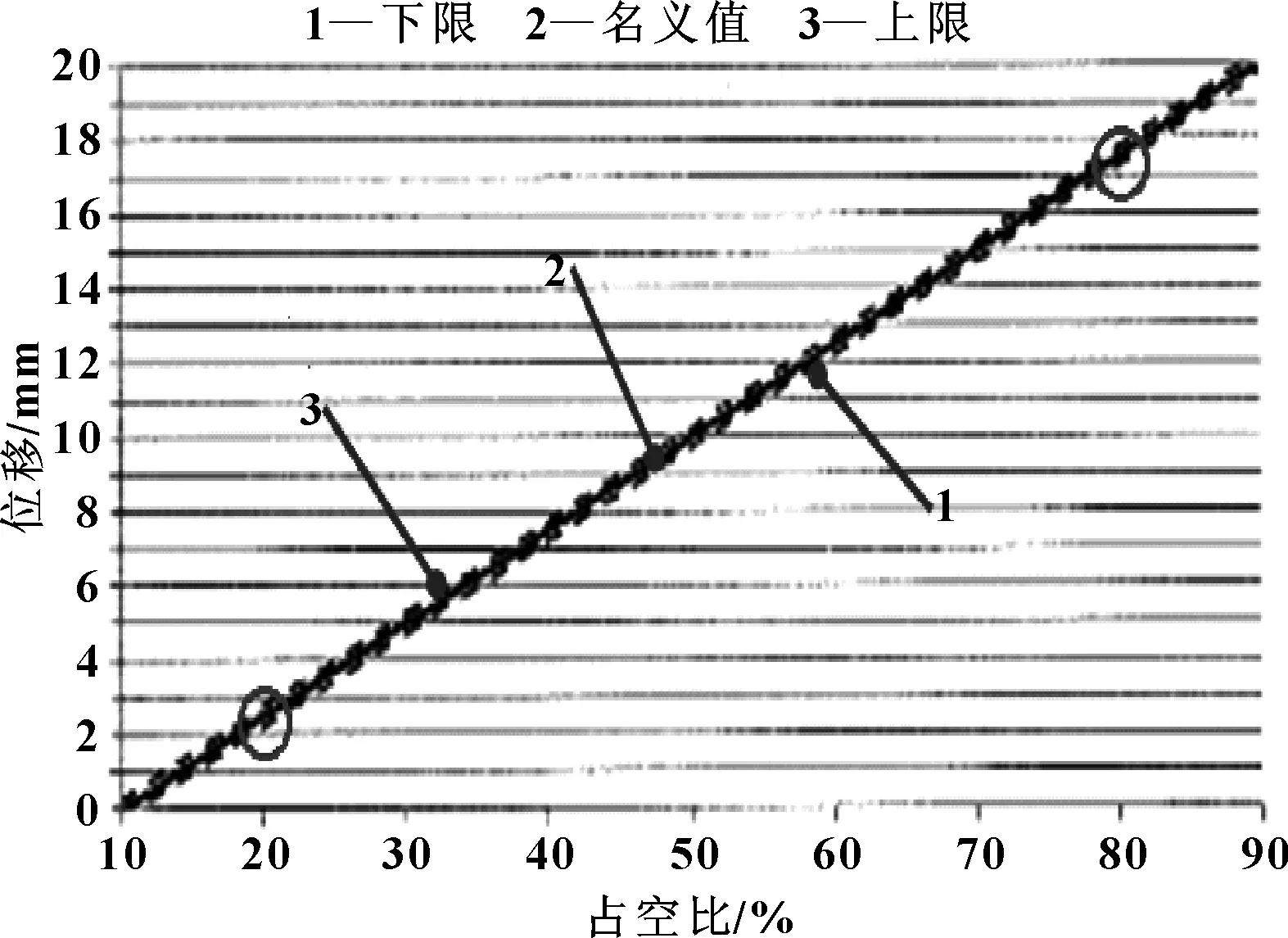
圖8 位移傳感器輸出曲線
執(zhí)行機構(gòu)運行至初始行程,并進行占空比標(biāo)定(約20%),記錄行程LA≈3 mm。執(zhí)行機構(gòu)運行至最大行程,并進行占空比標(biāo)定(約80%),記錄行程LB≈18 mm。所以:
LB-LA=15 mm≥Lmax1
則試驗樣件滿足離合器最大行程需求。
(3)執(zhí)行機構(gòu)執(zhí)行時間驗證
通過控制器讀取CSC端建壓的實際時間,如圖9所示。
讀取電機遲滯時間tA約為0.15 s,電機運行至kisspoint的時間tB約為0.15 s,執(zhí)行機構(gòu)運動時間tC約為0.5 s。tA+tB≈0.3 s≤t1,且tC≈0.5 s≤tw1,試驗樣件滿足離合器最大行程需求。
根據(jù)試驗樣件測試結(jié)果,文中設(shè)計的試驗樣件基本能滿足離合器的驅(qū)動力、位移及驅(qū)動速度要求。
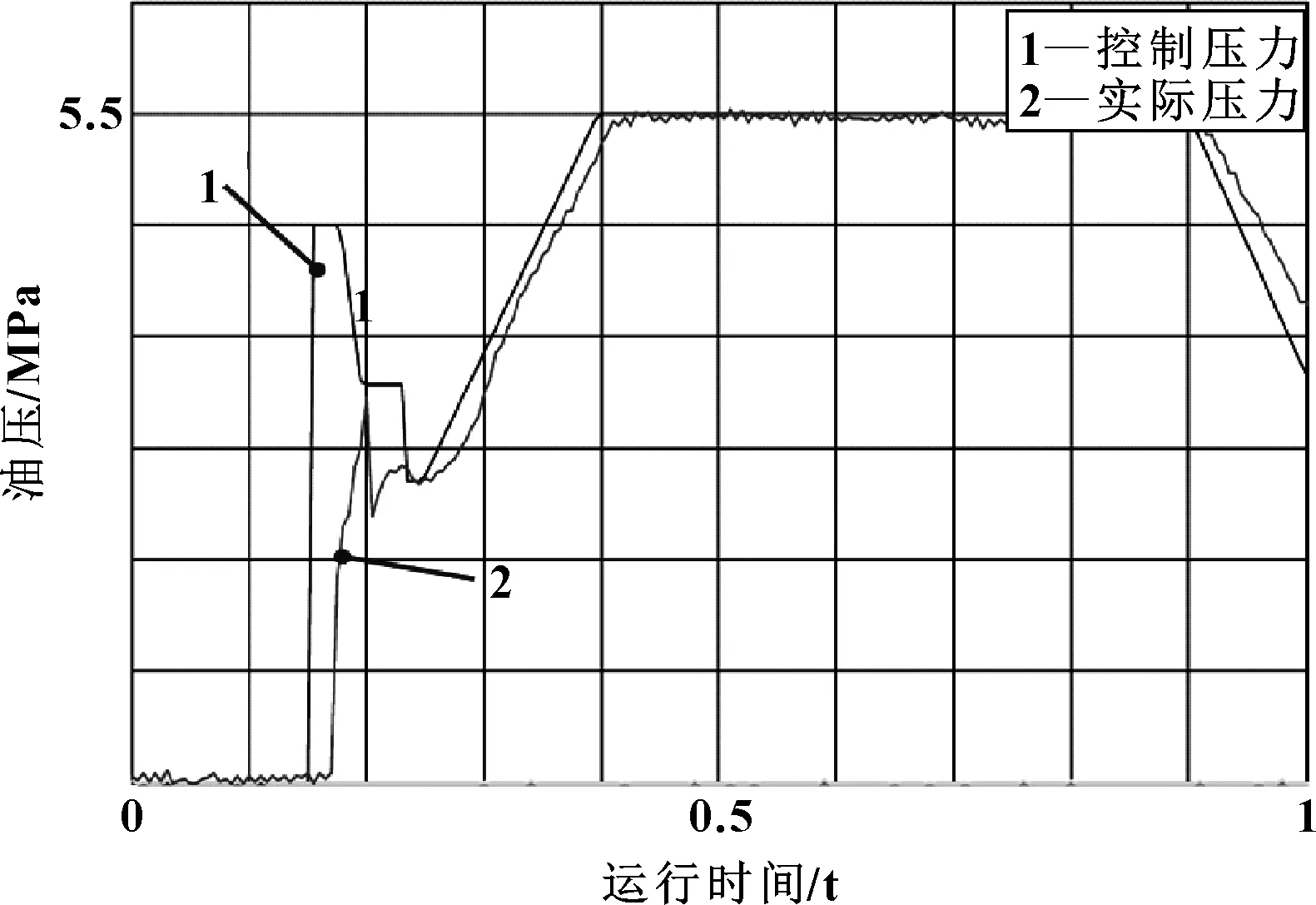
圖9 CSC充壓曲線
6 總結(jié)
本文作者設(shè)計的離合器執(zhí)行機構(gòu),是一種新型的機電一體式執(zhí)行機構(gòu)。相較于現(xiàn)有的離合器執(zhí)行機構(gòu),此種離合器執(zhí)行機構(gòu)通過繼續(xù)改進優(yōu)化,可實現(xiàn)更低成本、更輕量化及更高的執(zhí)行效率。此模塊高度集成,可以推廣應(yīng)用到更多種類的變速器總成(如AMT、CVT等)。
