基于神經網絡PID的丘陵山地拖拉機姿態同步控制系統
2020-02-02 04:09:10張錦輝李彥明齊文超劉成良楊福增李政平
農業機械學報 2020年12期
關鍵詞:系統
張錦輝 李彥明 齊文超 劉成良 楊福增 李政平
(1.上海交通大學機械與動力工程學院, 上海 200240; 2.西北農林科技大學機械與電子工程學院, 陜西楊凌 712100;3.山東五征集團, 日照 276800)
0 引言
我國丘陵山地地形分布廣泛,其面積占陸地總面積的43%以上。由于缺乏丘陵山地的農業機械,因此給農業生產帶來了諸多不便[1]。丘陵山地坡度一般為6°~15°,拖拉機作業時容易導致耕深不均勻和發生側翻,影響了作業效率和農作物的生長[2]。拖拉機在路面崎嶇的丘陵山區作業時,根據丘陵山地的作業環境特點,設計車身橫向姿態調整系統能夠有效提高駕駛舒適性和安全性,設計機具橫向調整系統能夠使機具與路面保持水平狀態,有助于保證耕深均勻,提高作業效率和作業質量[3]。
目前,國內外對丘陵山地機械調整系統的研究主要集中在車身調平方面,對后橋機具[4-8]作業姿態的同步控制研究尚處于起步階段。在車身調平方面,COLOMBO等[9]研究的自動調平系統通過一套液壓氣動懸架來保證拖拉機駕駛室的水平狀態。PIJUAN等[10]研究的懸掛機構可以主動調節自身高度,進而進行底盤調平,但控制精度較低。文獻[11-15]研究了一種適用于微型履帶山地拖拉機的液壓差高機構,采用PID算法實時計算機構的期望位置,實現車身調平。胡春輝等[16]設計了一種應用于農田清平機的三點調平系統,并進行了試驗驗證,其精度和速度均較為理想。在機具姿態調整方面,邵明璽等[2]提出了基于模糊PID控制的雙液壓缸橫向位姿調整系統,通過液壓缸活塞位移帶動機具產生橫向角度,以實現機具與地面的平行,但該系統簡單使用車身傾角替代地面傾角,難以滿足實際使用需求。劉林[17]設計的機具調平系統實現了機具的全自動調平,提高了系統的可靠性,但由于使用電磁換向閥來控制液壓缸運動,其控制精度有待提高。
目前,國內外研究主要單獨針對車身或者機具姿態控制展開,缺乏對車身和機具同步姿態控制的研究。同時,現有丘陵山地拖拉機姿態主動調整系統姿態調整方案功能單一、適應性和實用性有限,難以滿足復雜多變的作業需求。針對車身和機具姿態實時調整需求,本文采用神經網絡PID算法設計丘陵山地拖拉機車身-機具姿態同步控制系統,進行仿真和試驗,并與常規的PID算法進行對比。
1 控制系統設計及運動學分析
丘陵山地拖拉機姿態控制系統示意圖如圖1所示。由于拖拉機整車重心、駕駛室位置均位于后驅動橋,且前驅動橋為隨動系統,前、后橋由一單自由度旋轉軸連接。因此,本文設計的車身橫向調平裝置安裝在后驅動橋,不會對前輪造成影響。
車身橫向姿態調整系統通過偏心擺動機構的轉動,帶動安裝在偏心擺動機構末端的車輪中心,產生相對位移h,進而使后驅動橋產生橫向角,調整車身保持橫向水平。
機具橫向姿態調整系統以計算得到的實時路面傾角作為目標傾角,通過旋轉液壓缸的伸縮運動,帶動旋轉架、機具繞旋轉軸轉動,產生橫向角度,使機具橫向傾角與路面保持平行。
1.1 車身橫向姿態調整系統設計
車身橫向姿態調整系統安裝實物圖如圖2a所示,其核心組成部件包括車身橫向傾角傳感器和液壓馬達驅動的左、右偏心擺動機構,及對應的擺角傳感器。車身橫向傾角傳感器安裝于后驅動橋箱上方車身,左、右擺動機構分別安裝于半軸套管與車輪之間,左、右擺角傳感器安裝于對應的擺動機構。
擺動機構示意圖如圖2b所示,擺動機構由2個比例閥控液壓馬達控制其擺動速度和擺動方向。左、右擺角傳感器安裝平面與水平面之間的夾角分別為左、右擺角α1和β1,半軸中心與驅動軸中心連線的長度為擺動半徑l。為保證車輛正常行駛,兩側擺角應大小相同,方向相反,擺角范圍為(-80°,80°)。由圖2b可知,當α1和β1均為0°時,驅動軸軸心與后驅動橋軸心在同一平面上,此時,在垂直方向上的相對位移h=0。當擺動機構轉動一定角度時,驅動軸與半軸中心會產生一定的高度差h,以左輪為例,此時有
h=lsinα1
(1)
圖2c給出了車輛未進行姿態調整時,簡化后的車身姿態調整系統示意圖。圖中,點A、B分別表示左、右半軸中心,兩點之間的距離為后橋長度L,車身橫向傾角傳感器安裝平面與水平面的夾角為θ1。
車身調整后,后驅動橋應與水平面平行,即點A、B連線與水平面平行。未調整時,點A、B與水平面之間的高度差H為
H=Lsinθ1
(2)
為保持后橋水平,需驅動擺動機構轉動一定角度,使點A、B分別上升、下降H/2,即h=H/2,如圖2d所示。控制器通過CAN總線實時接收車身橫向傾角傳感器和左、右擺角傳感器的數據,計算比例閥的輸出電流,從而控制擺動機構轉過一定的擺角,實現車身橫向調平控制。
1.2 機具橫向姿態調整系統設計
機具傾角需要在作業過程中隨地形起伏進行調節,使之與當前的地面傾角基本一致。拖拉機、機具姿態調整機構、機具的安裝實物圖如圖3a所示。其主要組成部件包括機具橫向傾角傳感器、旋轉液壓缸和旋轉架。機具姿態調整機構示意圖如圖3b所示,調整機構通過上拉桿和牽引架上安裝的兩個下拉桿與拖拉機用球銷進行連接,機具通過上連接桿和兩個下連接板與調整機構用球銷進行連接,下連接板通過定位螺栓安裝于旋轉架。如圖3c所示,在旋轉架一側安裝機具橫向傾角傳感器,用于實時檢測機具的實際傾角,機具橫向傾角傳感器實時測量機具的實際傾角,其安裝平面與水平面的夾角即為機具橫向傾角γ1,上轉軸與旋轉軸中心連線長度為S1,轉軸連桿長度為S2,旋轉液壓缸及其連桿總長度為S3。由幾何關系可得
(3)

圖3 機具姿態調整機構實物圖與示意圖Fig.3 Schematics of attitude adjustment mechanism of implement1.上拉桿 2.上連接桿 3.下連接板 4.機具橫向傾角傳感器 5.旋轉液壓缸 6.旋轉軸 7.旋轉架 8.牽引架 9.下拉桿 10.轉軸連桿
旋轉液壓缸的直線伸縮通過轉軸連桿和旋轉軸帶動旋轉架旋轉,進而控制懸掛的機具轉動,實現機具姿態控制,機具橫向傾角調整范圍為(-20°, 20°)。
為保證機具與地面的橫向平行關系,機具的目標傾角應等于當前的路面傾角。控制器接收機具橫向傾角傳感器測得的角度,結合車身橫向傾角傳感器和左、右擺角傳感器的數據,計算比例閥的輸入電流,從而控制機具轉動,實現機具姿態控制。
1.3 同步控制原理
控制系統框圖如圖4所示,圖中θ為車身目標傾角,在本系統中θ=0°,θ2為根據左、右擺動機構擺角計算出的車身與路面夾角,α0為左擺動機構目標擺角;β0為右擺動機構目標擺角;機具的目標傾角與路面實際傾角相等,Iα、Iβ、Iγ分別為左比例閥、右比例閥、機具比例閥的輸入電流。

圖4 姿態同步調整控制框圖Fig.4 Attitude coordination adjustment control block diagram
基于神經網絡PID算法的同步控制原理為:主控器接收車身橫向傾角傳感器和左、右擺角傳感器的數據,計算兩側擺動機構應該擺動的角度;同時,據此計算出當前路面傾角,作為機具控制系統的目標傾角θ0,且有
θ0=θ1+θ2
(4)
由系統控制框圖車身姿態控制系統的外環神經網絡PID和機具控制系統的神經網絡PID控制器使執行機構運動到目標位置,車身姿態控制系統的內環PID控制器保證了在調整過程中,兩側擺動機構擺角滿足大小相等、方向相反的要求。
其中,結合式(1)、(2)可得出傾角轉擺角換算器和擺角轉傾角換算器計算公式為
Ltan(θ-θ1+θ2)=lsinα0-lsinβ0
(5)
lsinα1-lsinβ1=Ltanθ2
(6)
結合式(3)可得出機具傾角-液壓缸位移換算器計算公式為
(7)
式中y——液壓缸位移,m
2 系統建模與控制器設計
2.1 系統建模
同步控制系統通過控制比例閥控馬達系統和比例閥控液壓缸系統,對車身姿態和機具姿態進行調整。為便于控制器設計和仿真,需對液壓馬達和液壓缸系統進行數學建模。
為簡化討論,建模過程中的閥系數取值均取零位系數,將固有頻率較高的電液比例伺服閥近似看做比例環節。車身、機具等機械結構轉動產生的負載力矩(或負載力)均計算在總負載力矩(或總負載力)上。
2.1.1閥控液壓馬達系統模型
對于系統中慣量較大的閥控液壓馬達,不考慮彈性負載的作用,其數學模型可表示為
(8)

(9)
(10)
式中ωh1——液壓馬達液壓固有頻率,rad/s
ξh1——液壓馬達液壓阻尼比
I——通入比例電磁鐵電流,A
TL——液壓馬達和車身折算在馬達軸上的總負載力矩,N·m
θm——液壓馬達轉角,rad
Kq1——閥控馬達系統中比例閥的流量增益系數
Bm——液壓馬達粘性阻尼系數
Ksv——比例閥比例系數
βe——油液有效體積彈性模量,Pa
Dm——液壓馬達理論排量,m3/rad
Jm——折算到馬達軸上的總慣量,kg·m2
Vt——閥腔、馬達腔與連接管道總容積,m3
Kce——閥控液壓馬達系統總流量壓力系數,m5/(N·s)
考慮到后車身質量大,轉動慣量大,因此需考慮液壓馬達軸上的總負載力矩TL在車身橫向調平過程中,由于車身轉動產生的力矩。后車身受力簡圖如圖5所示。

圖5 后車身受力簡圖Fig.5 Schematic of rear body force
由力平衡方程和力矩平衡方程結合式(1)可得左、右液壓馬達負載力矩分別為
(11)
(12)
式中TL1——左液壓馬達負載力矩,N·m
TL2——右液壓馬達負載力矩,N·m
mc——后車身質量,kg
Jc——后車身轉動慣量,kg·m2
αc——車身橫向傾斜角加速度,rad/s2
2.1.2閥控液壓缸系統模型

(13)

(14)
(15)
式中ωh2——液壓缸液壓固有頻率,rad/s
ξh2——液壓缸液壓阻尼比
m——活塞及負載總質量,kg
f——機具及旋轉架折算在活塞上的總負載,N
Kq2——閥控液壓缸系統中比例閥的流量增益系數
A1——無桿腔活塞有效面積,m2
Bp——活塞及負載粘性阻尼系數
Kt——閥控液壓缸系統總流量壓力系數
同理,考慮到旋轉架等機械結構的轉動慣量,由力矩平衡方程,結合式(3)可得,作用在液壓缸活塞上的總負載f為
(16)
式中Jt——機具及旋轉架轉動慣量,kg·m2
αt——機具橫向傾斜角加速度,rad/s2
2.2 BP神經網絡PID控制器設計
控制器通過調節比例系數Kp、積分系數Ki、微分系數Kd,改變3個單元的增益,提高系統的動態性能和穩態性能。
常規的PID控制器參數整定方法包括基于參數最優化的整定方法、基于對象參數辨識的整定方法等[20],利用2.1節建立的被控對象數學模型,通過控制器參數與系統動態和穩態性能之間的定性關系,采用試驗法進行參數整定[21]。具體步驟為:
(1)為減少需整定的參數,采用PI控制器,即Kd=0,為保證系統穩定,比例系數Kp的初始值不能太大。
(2)給出階躍輸入信號,如階躍響應超調量過大或系統發生振蕩,無法收斂于期望輸出,則減小Kp,增大Ki,如沒有超調,但響應緩慢,則按相反方向調整。在調節過程中,如消除誤差的速度較慢,也可適當減小Ki。
(3)如果反復調整Kp、Ki,仍存在較大超調,則加入微分控制,Kd從0開始逐漸增大。反復試驗后,取綜合性能最好的參數組合[22]。
上述PID控制器參數需經多次試驗調整,且一旦確定,在系統運行過程中無法改變。分析2.1節建立的電液系統數學模型可知,由于電液系統存在死區、壓力-流量增益等非線性特性,對其進行數學建模時,需要進行合理的假設,將非線性特性進行局部線性化,但這種線性化處理會影響到系統的動態特性[23]。而BP神經網絡可以實現任意非線性映射[24-26],利用神經網絡可以建立參數自整定的PID控制器,從而優化控制系統的靜態和動態性能。基于BP神經網絡的PID控制系統結構框圖如圖6所示。控制器由經典增量式PID控制器和BP神經網絡組成。

圖6 基于BP神經網絡的PID控制系統結構框圖Fig.6 Block diagram of PID control system based on BP neural network
采用經典增量式數字PID控制,其計算公式為[27]
u(k)=u(k-1)+Kp(e(k)-e(k-1))+Kie(k)+
Kd(e(k)-2e(k-1)+e(k-2))
(17)
式中u(k)——k時刻控制器輸出的電流
e(k)——k時刻的控制偏差
對于2.1節所述液壓馬達系統,e(k)為k時刻目標擺角與實際擺角的差值;對于液壓缸系統,e(k)為k時刻路面實際傾角與機具橫向傾角的差值。
本文控制算法使用的神經網絡采用4-5-3結構的BP網絡。其中隱含層神經元的激勵函數采用正負對稱的雙曲正切函數,PID控制器的3個參數均為非負值,因此,輸出層的激勵函數采用非負的Sigmoid函數。
根據控制框圖,神經網絡輸入層輸出選定為
(18)
神經網絡隱含層輸入為
(19)
輸出為
(20)
神經網絡輸出層輸入為
(21)
輸出為
(22)
其中
f(x)=tanh(x)
(23)
(24)



式(18)~(22)中,上標(1)、(2)、(3)分別對應輸入層、隱含層和輸出層。
在神經網絡前向傳輸過程中,取性能指標J來判斷當前PID參數,性能指標J計算公式為
(25)
正向傳播計算完畢后,根據實際輸出與期望輸出的誤差按連接通路進行反向計算,對各層之間的權值進行調整,以優化性能指標J,即減小誤差信號。利用最速下降法推導得到輸出層權值調整公式為
(26)
其中

(27)
式中η——學習速率,取0.3
α——慣性系數,取0.05
隱含層權值調整公式為
(28)
其中
(29)
根據以上推導可知,在控制過程中,若實際輸出與期望輸出不一致,各層神經元之間的權值進行自動實時調整,進而調整輸出層輸出,實現PID參數的自整定。
3 仿真分析
使用Matlab中的可視化仿真工具Simulink建立丘陵山地拖拉機姿態系統控制系統動力學模型,利用S-function模塊搭建神經網絡PID控制器,結合2.2節中建立的數學模型,通過試驗法對控制器的比例、積分、微分系數進行整定,即可對模型進行仿真。系統主要模型參數如表1所示,Simulink仿真模型如圖7所示。
一般來說,丘陵山地拖拉機的作業路面傾角范圍為(-15°,15°),車身姿態控制系統中擺動機構的擺角范圍為±80°,根據機構設計尺寸可知,路面傾角為15°時,擺動機構擺角為(-75°,75°),處于安全范圍。因此,車身橫向傾角初始值為15°,機具橫向傾角初始值為0°,給定幅值為15°路面傾角的階躍信號。

表1 系統模型參數Tab.1 Parameters of system model
仿真結果如圖8所示。圖8a為PID控制算法的車身調整仿真結果,上升時間為12 s,超調量為0.85°,圖8b為神經網絡PID控制算法的車身調整仿真結果,調整時間為10.22 s,基本無超調。圖8c為PID控制算法的機具調整仿真結果,上升時間為0.71 s,超調量為0.55°,圖8d為神經網絡PID控制算法的機具調整仿真結果,上升時間為0.66 s,超調量為0.32°。仿真結果驗證了神經網絡PID控制算法的可行性。同時,神經網絡PID控制算法的準確性、快速性均優于PID控制算法。
4 試驗
4.1 試驗設備與條件
對山東五征集團生產的四輪拖拉機進行改裝,安裝車身姿態調整機構和機具姿態調整機構。使用自主研發的控制系統控制器,CPU使用意法半導體生產的STM32F407ZGT6型芯片;使用TLE82453型芯片輸出PWM電流,控制比例電磁閥,電流為0~1.5 A;使用4個浙江北微信息科技有限公司生產的BW-VG525型動態傾角傳感器,分別安裝在左右擺動機構、車身、機具姿態調整機構上,實時測量左右擺角、車身橫向傾角和機具橫向傾角;使用CAN總線通信,用于接收傳感器數據。
試驗分為2個工況。工況1:在一段坡度相對固定的路面,以約3 km/h的速度進行作業,分別啟動PID同步控制程序和神經網絡PID同步控制程序,驗證方案的可行性,對比、分析同步控制效果;工況2:在一段起伏較大,坡度變化明顯的路面,以約3 km/h的速度進行作業,對比PID和神經網絡PID在較為惡劣工況下的同步控制效果。試驗現場如圖9所示。
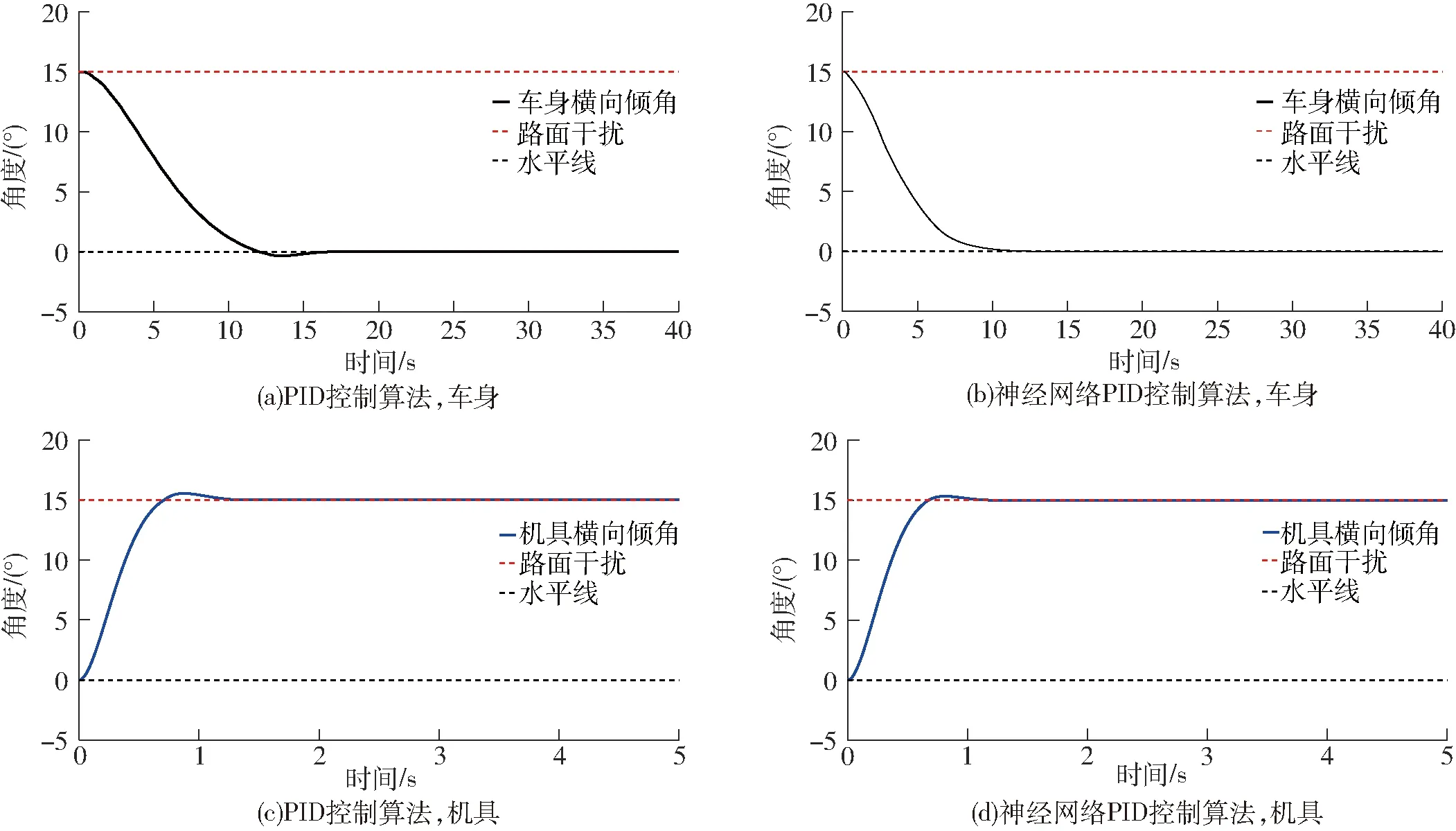
圖8 階躍響應仿真結果Fig.8 Step response simulation results

圖9 試驗現場Fig.9 Experimental site
4.2 試驗結果及分析
4.2.1固定坡度路面試驗
固定坡度路面的傾角變化如圖10所示,作業路面傾角在14°上下波動,波動范圍約±1°,結果表明,可以模擬丘陵山地拖拉機常見的作業工況。
圖11a為基于PID算法和神經網絡算法的控制方法下的車身姿態調整效果。由圖可知,由于路面起伏不大,車身橫向傾角變化范圍較小。經計算可知,PID算法控制下,車身橫向傾角最大誤差為0.975 0°,平均絕對值誤差為0.178 2°,均方根誤差為0.231 1°;神經網絡PID算法控制下,車身橫向傾角最大誤差為0.864 0°,平均絕對誤差為0.160 4°,均方根誤差為0.225 6°。

圖11 固定坡度路面試驗結果Fig.11 Fixed slope road test results

圖10 固定坡度路面傾角變化曲線Fig.10 Curve of inclination of fixed slope pavement
圖11b為兩種算法控制下的擺動機構運動情況。計算可知,PID算法控制下,左右擺角絕對值差最大誤差為1.445 0°,平均絕對誤差為0.392 1°,均方根誤差為0.480 7°;神經網絡PID算法控制下,左右擺角絕對值差最大誤差為0.960 0°,平均絕對誤差為0.351 2°,均方根誤差為0.419 0°。在路面坡度變化不大的情況下,所提控制方法能夠保證車身橫向傾角基本為0°左右,誤差范圍較小,能夠滿足丘陵山地拖拉機的常見工況。同時對比可知,神經網絡PID控制算法的性能優于常規的PID控制算法。
圖11c為兩種控制方法下的機具傾角調整情況。由圖可以看出,機具傾角隨路面實際傾角的變化不斷調整,跟蹤效果較好。為更直觀地比較不同控制方法的性能,分別繪制PID算法和神經網絡PID算法控制下的機具傾角調整誤差曲線,如圖11d所示。計算可知,PID算法控制下,機具橫向傾角最大誤差為0.779 6°,平均絕對誤差為0.200 5°,均方根誤差為0.244 2°;神經網絡PID算法控制下,機具橫向傾角最大誤差為0.649 7°,平均絕對誤差為0.168 6°,均方根誤差為0.201 9°。在角度固定,起伏不大的作業路面,2種控制算法控制誤差差別不大,神經網絡PID算法相對更優,驗證了該方法的可行性。
4.2.2隨機坡度路面試驗
使用PID算法和神經網絡PID算法啟動同步控制程序,以1擋作業速度(約3 km/h)行駛在起伏較大的隨機路面上,路面傾角變化曲線如圖12所示,路面最大傾角約13.5°,傾角極差約為18°,可以較好地模擬出惡劣作業工況。

圖12 隨機坡度路面傾角變化曲線Fig.12 Curve of inclination of random slope pavement

圖13 隨機坡度路面試驗結果Fig.13 Random slope road test results
圖13a為基于PID算法和神經網絡算法的控制方法下的車身姿態調整情況。對比圖10可以看出,在路面傾角變化不大的路面,車身橫向傾角基本為0°,在劇烈起伏的路面,車身橫向傾角在0°附近小幅度波動。經分析可知,PID算法控制下,車身橫向傾角最大誤差為4.179 9°,平均絕對誤差為0.811 1°,均方根誤差為1.204 9°;神經網絡PID算法控制下,車身橫向傾角最大誤差為2.874 0°,平均絕對誤差為0.577 7°,均方根誤差為0.862 1°。可見,基于神經網絡PID算法控制的車身橫向傾角基本保持水平,滿足安全作業的需要,且誤差和誤差波動程度優于常規的PID控制算法。
圖13b為2種算法控制下的擺動機構運動情況。經計算可知,PID算法控制下,左右擺角絕對值差最大誤差為5.770 0°,平均絕對誤差為1.241 2°,均方根誤差為1.546 1°;神經網絡PID算法控制下,左右擺角絕對值差最大誤差為4.280 0°,平均絕對誤差為0.988 5°,均方根誤差為1.190 9°。
圖13c為基于PID算法和神經網絡算法的控制方法下的機具傾角調整效果,可以看出,在150~300 s之間起伏較大的路面行駛時,機具基本可以與路面保持平行。圖13d為不同控制算法下機具傾角調整誤差曲線,經計算可知,PID算法控制下,機具橫向傾角最大誤差為2.740 2°,平均絕對誤差為0.935 3°,均方根誤差為1.360 2°;神經網絡PID算法控制下,機具橫向傾角最大誤差為1.762 0°,平均絕對誤差為0.624 6°,均方根誤差為0.907 4°。由此可知,相比常規PID控制算法,神經網絡PID算法有效提高了機具傾角對路面實際傾角的跟蹤精度,降低了誤差波動程度,在作業過程中機具基本與路面保持平行,保證了耕深均勻。
由試驗數據可知,在起伏較大的隨機路面上(路面最大傾角小于15°),基于神經網絡PID算法的同步控制系統效果更好。其中,車身姿態控制方面,車身橫向傾角控制精度在±2.874 0°以內,機具姿態控制方面,機具橫向傾角與路面傾角差值的控制精度在±1.762 0°以內,在調整車身水平,滿足車輛作業安全的前提下,保證了機具橫向傾角與路面的平行,從而提高了作業質量和效率。
5 結論
(1)設計了丘陵山地拖拉機姿態同步控制系統,該系統由車身姿態控制系統和機具姿態控制系統兩部分組成。仿真分析結果表明,基于神經網絡PID控制算法的同步控制系統的控制性能優于PID控制算法,能夠滿足整車姿態調整要求。
(2)固定坡度路面田間試驗表明,在本文方法控制下,車身橫向傾角最大誤差為0.864 0°,機具橫向傾角最大誤差為0.649 7°,能夠滿足拖拉機主要作業工況要求。
(3)隨機坡度路面惡劣工況下的田間試驗進一步驗證了本文方法的有效性。結果表明,車身橫向傾角最大誤差為2.874 0°,機具橫向傾角最大誤差為1.762 0°。在固定坡度路面與隨機路面上,基于神經網絡PID算法的控制性能均優于PID算法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
