復雜地形條件下的著陸設計與控制仿真
2020-02-04 07:27:44任佳王計真劉小川
航空科學技術 2020年9期
關鍵詞:控制
任佳 王計真 劉小川
摘要:為解決飛行器無法在復雜地形條件下著陸的問題,開展著陸裝置設計與控制方法研究。本文設計了一種六腿結構,提出該結構在復雜地形條件下的著陸設計方法,并通過Matlab仿真的方法,開展著陸性能與控制方法仿真。結果表明:該六腿起降裝置可有效適應復雜地形條件下的著陸需求,通過控制驅動桿角度和足底坐標均可以實現著陸控制,但直接控制足底坐標的效果更優。
關鍵詞:起降裝置;復雜地形;著陸設計;控制
中圖分類號:V285文獻標識碼:ADOI:10.19452/j.issn1007-5453.2020.09.014
基金項目:航空科學基金(2017ZA23001)
近年來,隨著執行任務的現代化和復雜化程度提高,對飛行器的要求越來越高[1-3]。為適應復雜野外環境著陸和復雜應用場景的需求,自適應起降裝置將有著重要研究意義。
近些年來,智能控制方法[4]的發展使無人機具有更高的適應性。此外,足式機器人在復雜環境下具有更高的靈活性與環境適應性,與輪式、履帶式機器人相比具有明顯的優勢,更容易實現復雜地形的穩定行走與爬行[5]。其中,相比于單足、雙足、四足、八足等多種類型,六足結構具有更好的穩定性和環境適應性,深受研究者的青睞。
星球著陸探測器采用腿式結構完成不平整表面的著陸,所以腿式結構具有更高的復雜地形適應性[6]。腿部系統作為起降裝置的重要結構,其結構特性直接決定了起降裝置的運動學特性和動力學特性[7]。所以,腿部系統的設計原則是采用仿生學理念,提出簡單且高效的結構和驅動系統,實現仿生運動。本文提出一種基于飛行器的復雜地形腿式結構的設計方法,可顯著拓展飛行器的(陸地)地形和(海洋)環境適應能力。本文給出具體的設計過程,并基于設計的起降裝置構型,給出其控制方法。通過仿真驗證的方式,證明該設計方法的可行性與有效性。
1起降裝置設計
基于無人直升機給出地形自適應起降裝置的工作原理與設計方法。
1.1起降裝置設計構型
該起降裝置不同于傳統的輪式結構和滑橇式結構,融合仿生設計與智能控制,系統包括環境感知系統、控制/驅動系統、模塊化驅動關節和腿部承力結構、足底緩沖橡膠等。
自適應起降裝置包含6條腿共14個關節,其中每條腿具有兩個獨立關節,三條腿共用一個轉動關節實現腿部收入機體中。14個關節各自解耦,可分別控制。起降裝置的6條腿通過獨立的關節解耦控制,實現各自的姿態調整。腿部關節通過模塊化電驅動單元實現,包括伺服電機、減速機、制動器、編碼器和輸出軸。通過控制器控制電機驅動器,實現伺服電機的驅動和控制。
1.2起降裝置工作原理
應用過程中,地形自適應起降裝置的復雜地形著陸工作過程如圖2所示。
通過圖2可以看出,無人直升機在起動著陸過程后,通過以下5個步驟實現地形自適應著陸:
(1)在指定高度懸停,通過雷達實現地形掃描與識別,建立著陸地形模型。
(2)起落架控制系統收到著陸地形模型后,在無人直升機緩慢著陸的過程中,同時控制起落架系統運動,實現著陸地形的姿態預擺。
(3)緩慢著陸直至起落架觸及地面,安裝于足部的載荷傳感器產生力信號,將力信號傳遞給起降裝置控制器,作為姿態控制的輸入量。
(4)起降裝置根據得到的力信號的無人直升機慣性測量單元(IMU)信號控制起降裝置的姿態,保證機身的水平和各條腿的載荷平均分布。
(5)起降裝置到達設定最終姿態,且調整至穩定狀態后,關閉電源,通過制動器保持支持,完成著陸。
2起降裝置單腿設計方法
2.1理論模型
地形自適應起落裝置采用相同設計的6腿結構,且各條腿獨立控制,這里以單腿結構為例,詳細描述起降裝置的結構設計方法。單腿結構由連桿機構組成,驅動關節位于機架的上方,有助于增加其結構美觀性和提高其抗沖擊的能力。
如圖3所示,不考慮共用的旋轉關節,單腿結構由兩個四連桿機構abcd和efgd,以及一個平行四邊形機構dghi組成,兩個驅動關節安裝于a點和e點。利用四連桿機構的死點位置設計,可有效降低對驅動元件輸出力矩的要求,可充分利用死點位置開展仿生腿抗墜撞設計。
以足底運動范圍滿足復雜地形著陸條件為約束條件,以關節驅動力矩最小為優化目標,可確定單腿各連桿的長度參數,見表1。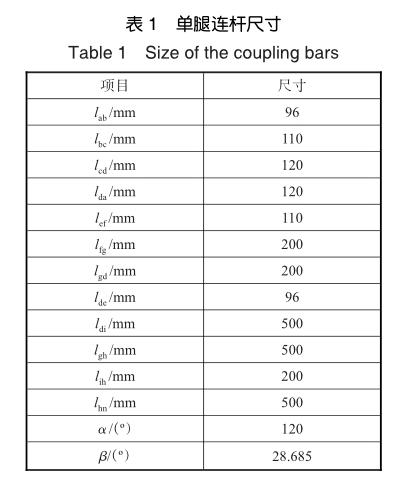
2.2單腿機構運動學建模
對于圖3的機構設計圖,基于剛體假設,采用解析法,構建單腿收放和起降過程的運動學和動力學理論分析模型,建立關節轉角與足端坐標的定量函數關系。

由圖4~圖5可看出,ab桿或ef桿旋轉一周,均存在兩個死點位置,且其驅動力矩為0,兩個死點中間存在一個急回區間,驅動力矩出現高峰;在死點兩端區域,驅動力矩較小,為慢回區間,驅動力矩相對較小。實際著陸過程,兩個連桿機構僅利用慢回區間,以降低驅動單元對驅動力矩的要求。
同時,在ab桿轉動過程中,ef桿的驅動力矩始終保持不變。也即兩桿的力矩自然解耦,ef桿的驅動力矩與ab桿的驅動角無關;同時,ab桿的驅動力矩也與ef桿的驅動角度無關。
3地形自適應著陸仿真與控制
3.1典型地形著陸仿真
限制兩個關節的驅動桿ab和ef在結構允許范圍內的運動,可以得到足端的實際運動空間,如圖6所示。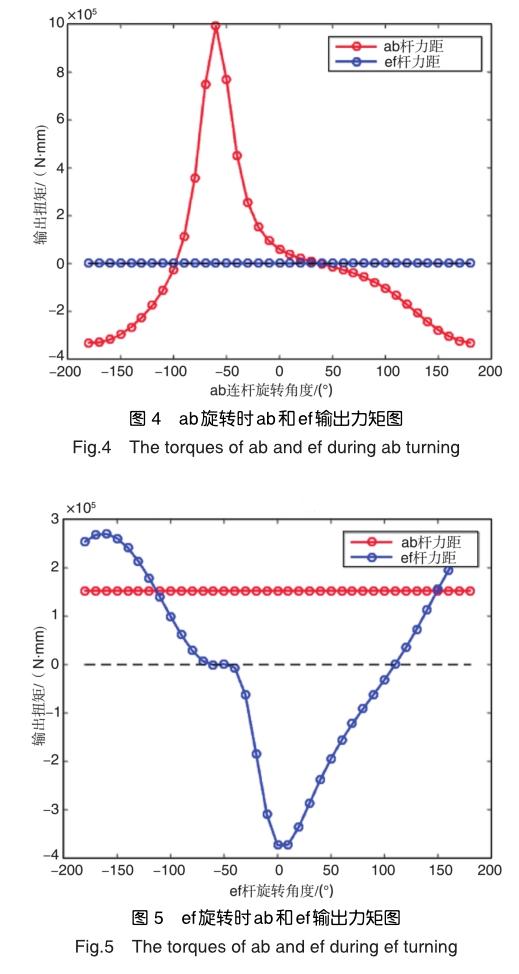
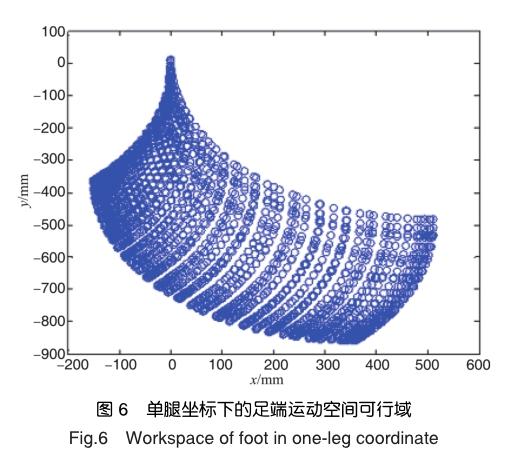
通過圖6的足端運動空間可以看出,其可觸達的運動空間主要集中在x向[-100,500],y向[-400,800]之間,運動范圍較大,通過分析可得,對于側向20°斜坡和200mm臺階,此設計腿式起落架可實現穩定支持。
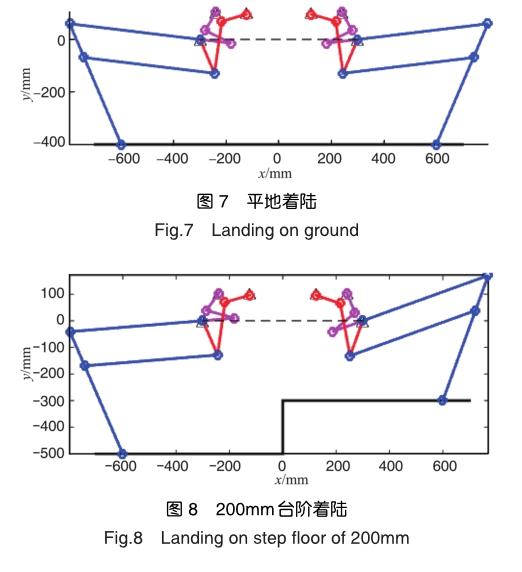
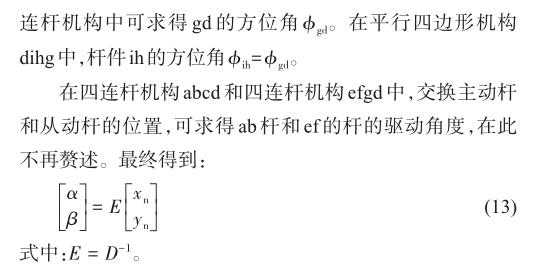
起降裝置需要根據不同的地形姿態調整其姿態,完成不同地形的自適應著陸。著陸過程中,根據機身據地面的高度確定d點的坐標,再根據地形條件確定足端落點位置坐標,根據逆運動理論模型,解算出主動桿ab和ef的驅動角度和驅動力矩。考慮到著陸過程為緩慢過程,地形穩態支撐狀態的研究對復雜地形的起降和停放具有研究意義。圖7~圖9給出典型地形的支撐狀態。
3.2著陸控制
在起降裝置著陸控制過程中,多采用逆運動學分析,即已知足端n的坐標,求解主動桿ab和連桿ef的驅動角。依然設定d點為坐標原點,假設已知足端n的坐標,求解主動桿ab和連桿ef的方位角。
對于起降裝置控制,采用分別給定單腿足底坐標的方式完成著陸控制。此處給出單腿控制方法,說明控制的效果。
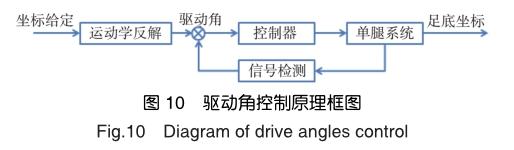
首先,以驅動桿ab和ef的輸入角度作為控制量對單腿系統進行控制,控制原理如圖10所示。其過程描述為在已知目標的足底坐標情況下,通過運動學反解,得到需要的系統輸入驅動角給定值,通過增量式比例積分微分(PID)比較驅動角的實際值與給定值,進而確定輸入驅動角的控制量,已達到控制驅動角的目的,通過驅動角實現單腿系統的控制。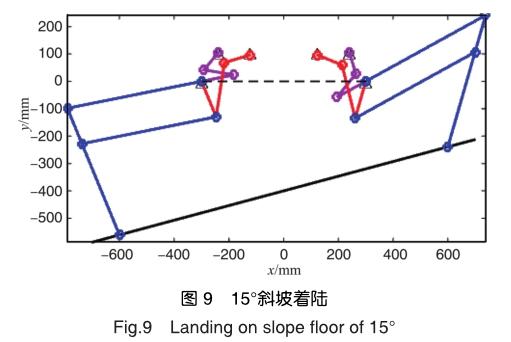
控制單腿足端從某點運動到垂直支撐狀態,及足底坐標的給定值為(500,-500)。通過解算得到驅動桿ab和ef的輸入值,控制仿真結果如圖11和圖12所示。
然后,還可采用另一種單腿控制的方法,即單腿系統的給定信號為坐標的預設值,與實際的足底坐標信號作比較得到輸入信號偏差,通過由運動學反解和PID控制器共同組成的控制系統,形成單腿系統所需的驅動角,將驅動角給如單腿系統獲得現在時刻的足底坐標,通過傳感器監測系統獲取足底坐標的真實值,作為系統反饋的條件。控制原理圖如圖13所示。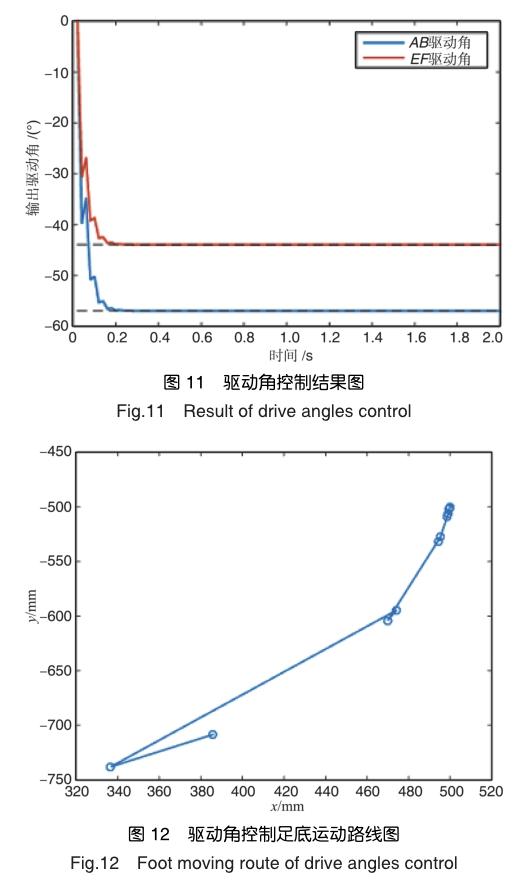
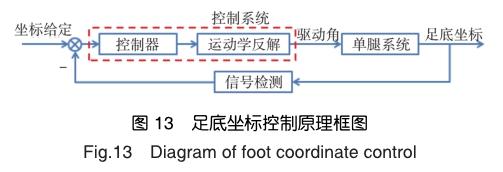
采用同圖12相同的起止點坐標進行控制仿真,其控制結果如圖14和圖15所示。
通過比較兩種控制結果可以看出,兩種控制方法均可以達到預想的控制效果,均無超調量,控制時間均在0.2s左右。對比足底運動軌跡,對于足底坐標的直接控制運動軌跡更優,對于驅動桿角度的控制方法在運動過程中存在明顯的振蕩,所以綜合看來對于足底坐標的直接控制更有利于起降裝置的腿部運動控制。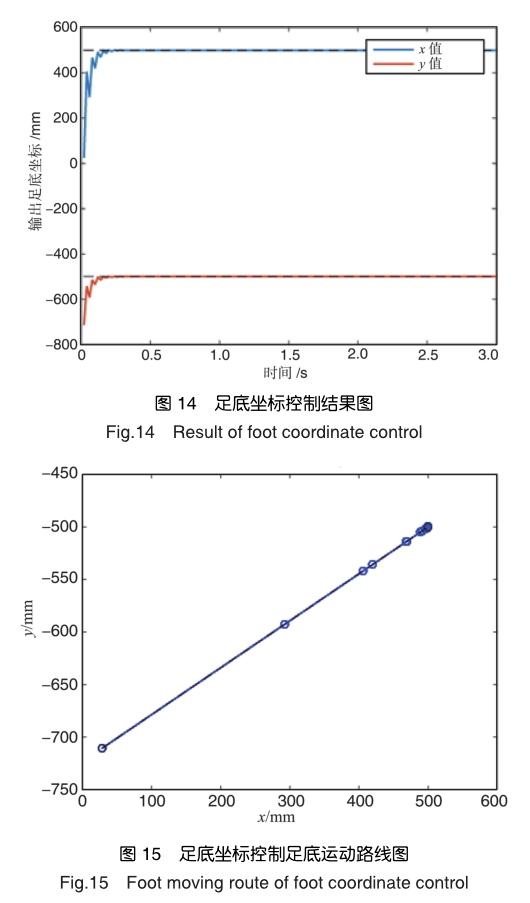
4結論
本文提出了一種基于無人直升機的地形自適應起降裝置的設計方法,在給出具體設計方法的基礎上,通過Matlab仿真給出典型的不同地形條件下的著陸情況,可得到如下結論:
(1)對于無人直升機,可采用腿式起降裝置完成地形自適應著陸,連桿機構和驅動關節的構型設計可用于起降裝置。
(2)通過控制四連桿就夠的驅動桿ab和ef,或者控制足底坐標均可完成地形自適應著陸。
(3)對足底坐標的直接控制有利于起降裝置的著陸控制效果,減少運動過程中的振蕩情況。
參考文獻
[1]Spanoudakis P,Tsourveloudis N C,Valavanis K P. Design specifications for an unmanned VTOL[C]// Proceedings of the 2004IEEEInternationalConferenceonRoboticsand Automation,2004:3616-3621.
[2]Do K D,Jiang Z P,Pan J. Global output feedback tracking control of a VTOL aircraft[C]//Proceedings of the 42th IEEE Conference on Decision and Control,2003:4914-4919.
[3]吳蔚. NASA明確未來25年航空研究工作重點[J].航空科學技術,2020,31(4):81-82. Wu Wei. NASA clarifies priorities for aviation research in the next 25 years[J]. Aeronautical Science & Technology, 2020,31(4):81-82.(in Chinese)
[4]宋欣嶼,王英勛,蔡志浩,等.基于深度強化學習的無人機著陸軌跡跟蹤控制[J].航空科學技術,2020,31(1):68-75. Song Xinyu, Wang Yingxun, Cai Zhihao, et al. Landing trajectory tracking control of unmanned aerial vehicle by deep reinforcement learning[J]. Aeronautical Science & Technology, 2020,31(1):68-75.(in Chinese)
[5]胡重陽,梅濤,劉彥偉.仿生六足機器人機構設計及控制方法研究[J].機械科學與技術,2014,11(33):1621-1627. Hu Chongyang, Mei Tao, Liu Yanwei. Research of control method and mechanism design of bio-inspired hexapod robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2014,11(33):1621-1627. (in Chinese)
[6]汪岸柳.月球著陸器軟著陸動力學與半主動控制研究[D].南京:南京航空航天大學,2011. Wang Anliu. Investigation on the soft-landing dynamics and semi-active control for lunar lander [D]. Nanjing: Nanjing University ofAeronautics andAstronautics, 2011.(in Chinese)
[7]黃林考,譚躍剛, David N,等.四足機器人仿生腿結構特性及其控制系統研究[J].機械設計與制造,2018,5(S1):150-154. Huang Linkao, Tan Yuegang, David N, et al. The research of bionic leg architecture character and control system for quadruped robot [J]. Mechaninery Design and Manufacture, 2018,5(s1):150-154. (in Chinese)
[8]徐艷妮.基于MATLAB的平面連桿機構綜合與分析[D].西安:西安科技大學,2014.Xu Yanni.The synthesis and analysis of planar linkage based on MATLAB[D]. Xian: Xian University of Science and Technology, 2014.(in Chinese)(責任編輯陳東曉)
作者簡介
任佳(1990-)女,碩士,工程師。主要研究方向:控制系統與優化、沖擊動力學試驗與分析。
Tel:029-88268285E-mail:renjiabest@163.com
王計真(1987-)男,碩士,工程師。主要研究方向:沖擊動力學。
Tel:13087501018
E-mail:wangjizhen623@163.com
劉小川(1983-)男,博士,研究員。主要研究方向:沖擊動力學。
Tel:029-88268663
E-mail:asri02@163.com
Landing Design and Control Simulation in Complex Terrain Conditions
Ren Jia*,Wang Jizhen,Liu Xiaochuan
Aviation Key Laboratory of Science and Technology on Structures Impact Dynamics,Aircraft Strength Research Institute of China,Xian 710065,China
Abstract: In order to solve the problem that aircraft cannot land under complicated terrains, researches on the design and control methods of landing devices are proposed. A six-legged structure is designed and a method of landing on complex terrain is proposed in this paper, and the software of Matlab is used to simulate the landing performance and control method. The results show that the device can effectively meet the landing requirements under complex terrain condition. Then landing control can be realized by controlling the drive bar angle and foot coordinates, but effect of controlling the foot coordinates is better.
Key Words: device of landing and take-off; complex terrain; landing design; control
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17