霍蘭德理論視域下基于物聯網架構的工業網絡實訓平臺
2020-02-07 13:03:52劉通曾華鵬劉偉
物聯網技術 2020年1期
關鍵詞:物聯網
劉通 曾華鵬 劉偉

摘 要:工業網絡技術是智能制造的重要支撐,為加強專業技術人才培養,基于物聯網架構研制工業網絡實訓平臺。該平臺采用標準的物聯網三層架構設計,應用層包括基于ProcessHub開發的服務器和基于Workbench開發的工業PAD客戶端,網絡層基于工業網絡交換機、網絡協議轉換模塊通信,感知層結合PLC、變頻器、步進電機、傳感器、控制器等技術,真實再現工業自動生產線中的分揀過程和水箱溫度/液位控制。實踐表明,結合霍蘭德職業性向和CDIO教學理念,采用項目化的教學方法配套開發實訓例程,可有效提高了學生的工程實踐能力和就業競爭力。
關鍵詞:工業網絡;物聯網;PLC;職業性向;CDIO;工程實踐;智能制造
中圖分類號:TP391文獻標識碼:A文章編號:2095-1302(2020)01-0-03
0 引 言
智能制造是新一輪工業革命的核心技術,是“中國制造2025”的主攻方向[1]。而工業控制網絡是計算機技術、通信技術與自動控制技術深度融合的產物,是實現智能制造的重要支撐,其主要包括現場總線技術和工業以太網技術[2-3]。隨著工業制造、互聯網、物聯網的融合發展[4],工業控制網絡從原來的現場層延伸到網絡層和應用層。
為了適應技術發展需要,培養具有較強的工業網絡實踐能力,能夠解決工程實際問題的自動化專業人才是當前高職教育和應用型本科教育的緊迫任務[5]。實訓課程是組織教學的一個重要環節[6],依托于實訓室建設和實訓設備配套。為了讓學生掌握最前沿的技術,真正實現學以致用,提高就業競爭力,本文模擬工業自動化生產現場典型控制類型,基于物聯網架構進行了本系統的研制,并結合霍蘭德職業性向理論和CDIO教學模式,配套開發相關實訓例程。
1 系統整體設計
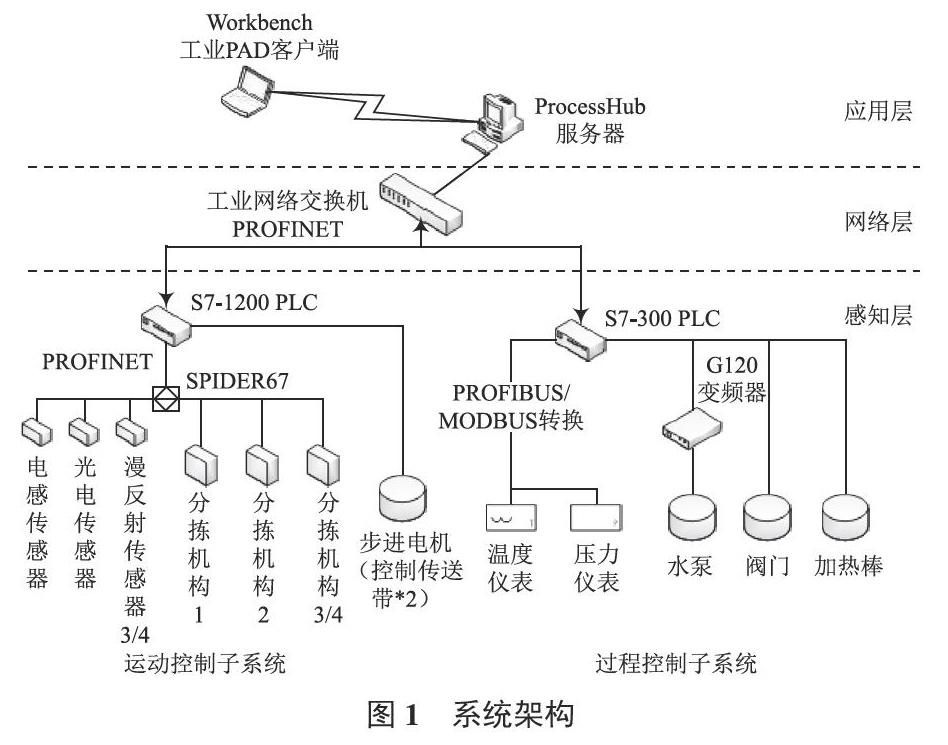
本系統采用標準的物聯網三層架構,分為感知層、網絡層和應用層。鑒于西門子公司的PROFINET和PROFIBUS是目前市場上應用廣泛的工業以太網和現場總線技術,且其PLC產品可靠性高、編程靈活、組網通信功能強[7-8],因此本系統選用西門子PLC作為感知層的控制核心。為模擬工業自動化典型控制類型,感知層包括運動控制和過程控制兩個子系統。網絡層基于工業網絡交換機、網絡協議轉換模塊,實現感知層與應用層的數據互通。應用層包括基于ProcessHub開發的服務器和基于Workbench開發的PAD客戶端,客戶端通過無線網絡連接服務器。本平臺可將PLC采集數據同步傳遞至服務器和PAD客戶端,實現實時監測,也可通過HMI開發,實現自上而下的控制。系統架構如圖1所示。
圖1中運動控制子系統包括西門子S7-1200 PLC,Spider67智能分布式I/O,傳感器和分揀機構等。光電傳感器分為3種類型共4組(1組電感、1組光電和2組漫反射傳感器)。3種類型傳感器可對應識別金屬、玻璃、塑料材質的物料,基于PROFINET通信的Spider67采集傳感器數據傳遞至PLC,通過PLC編程控制分揀機構動作。分揀機構包括4組氣動裝置和2組皮帶,氣動裝置通過伸縮實現物料推送、分揀,步進電機通過調節轉速、方向傳動皮帶,實現物料傳送。
過程控制子系統包括S7-300PLC、溫度傳感器、壓力變送器、G120變頻器等。以S7-300PLC為控制核心,基于PROFIBUS通信,采集壓力變送器和溫度傳感器數據,經與PLC程序設定液位值和溫度值比較,控制閥門和G120變頻器拖動水泵實現液位控制;基于PLC的PID軟件模塊,控制加熱棒電路通斷,實現溫度自動控制。工業網絡實訓平臺實物圖如圖2所示。
2 實訓例程設計
結合系統整體架構,按照自下至上、先局部后整體的思路,循序漸進設計以下實訓例程。其中,第一、二個例程面向感知層,突出PLC數據采集和控制功能的實現。第三、四個例程,圍繞系統通信和應用層HMI設計,突出整個系統通信和應用層監控功能實現。最后2個綜合性的實訓例程圍繞個子系統,設計自動分揀系統和PID過程控制系統實訓例程,是對前4個例程的綜合,將在第3部分結合教學方法闡述。
2.1 數據采集功能的組態
對運動控制子系統,需要用到的實訓設備主要包括S7-1200PLC、Spider67、光電傳感器和已安裝博途軟件的計算機。對過程控制子系統主要包括S7-300PLC、溫度壓力傳感器和已安裝博途軟件的計算機。本實訓以博途軟件為平臺,重點學習硬件插入與配置、地址設定、組態連接、PLC全局變量定義、邏輯程序編寫、程序下載和調試。為驗證實訓效果,可先提供服務器、PAD客戶端程序及HMI界面,以便直觀顯示采集數據。
2.2 控制功能的組態
運動控制子系統需要用到的實訓設備主要包括S7-1200PLC、Spider67、執行機構(分揀機構和步進電機)。過程控制子系統實訓設備主要包括S7-300PLC、G120變頻器和執行機構(控制加熱棒、閥門和水泵電路通斷的繼電器)。在掌握博途軟件操作基礎上,定義全局變量、編寫邏輯程序,實現氣動裝置伸縮、皮帶傳動速度與方向,以及對關聯加熱棒、閥門和水泵電路的繼電器實施控制。
2.3 PLC端和服務器端的通信組態
本實訓的目的是讓學生掌握使用工業APP快速生成套件,實現PLC與服務器端之間通信的操作方法。學習內容主要包括Workbench組態軟件,重點要掌握定義ProcessHub服務器地址,對應PLC程序全局變量終端地址在虛擬變量中設定相匹配的通信點,以及導出ProcessHub工程。另外,要掌握啟動ProcessHub服務、啟動Open SMC獲取PLC數據的方法。
2.4 安卓客戶端和服務器端之間的通信組態
本實訓的目的是讓學生掌握組態安卓APP和服務器端之間通信的方法。基于Workbench可視化的頁面開發模塊,通過拖拽、組合相關組件,關聯變量、操作賦值、動畫演示等設置,開發HMI界面。另外,要掌握如何使用JDK程序生成android.keystore文件,并用Workbench軟件與之關聯,導出安卓APP工程。
3 綜合實訓項目教學實施
自動分揀系統實訓例程和PID過程控制系統實訓例程是以項目為驅動,基于霍蘭德職業性向理論對學生分組分崗,基于CDIO教學模式規范項目開發和實訓流程。
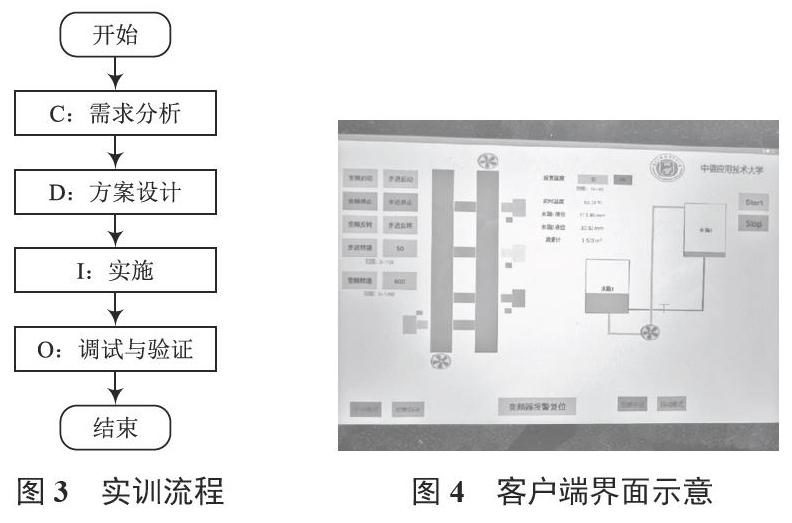
首先,采用分組分崗的方式設置項目工程師、應用工程師和現場工程師3類崗位,各個工作崗位與霍蘭德理論6種典型職業性向關聯見表1所列。通過輪崗實訓,使學生加強對自我職業性向認知,為下一步職業發展規劃,提供科學指導與借鑒。實訓流程如圖3所示,分為C,D,I,O四個階段。C為構思,主要是理解、確認和量化項目需求。以自動分揀系統為例,項目需求主要包括物料的材質、傳感器的種類及數量、氣動裝置的數量、傳感器的檢測距離、傳送帶的速度和方向以及在客戶端界面實現手自動控制等。D為設計,針對需求提出若干種方案。例如以S7-300PLC或以S7-1200PLC為控制核心,根據概念選擇工具,并選擇最優方案。I為實施,主要為系統硬件連接、PLC端軟件組態和梯形圖編程、系統通信連接、安卓客戶端界面設計等,客戶端界面示意如圖4所示。O為運行維護,主要為系統調試與驗證。
4 結 語
本實訓平臺綜合物聯網、PLC和工業總線等技術研制,真實再現工業自動生產線中的分揀過程和水箱溫度/液位控制,是一套完整的物聯網架構平臺,其克服了傳統實訓教學設備宏觀性不強的問題。平臺所選設備具有通用性、代表性和先進性,基于CDIO和職業性向教學理念,以工作過程為導向的項目教學法,配套開發實訓教學例程,經教學實踐檢驗,有效提高學生理論水平和工程實踐能力,為學生實習定崗、就業選崗打下堅實基礎。
參 考 文 獻
[1]周濟.智能制造:“中國制造2025”的主攻方向[J].中國機械工程,2015,26(17):2273-2284.
[2]俞益飛,李澤明.工業控制網絡實訓裝置設計與實現[J].通訊世界,2016(2):136.
[3]李倩.工業互聯網發展中的工廠網絡通信技術[J].信息與電腦(理論版),2016(14):145-146.
[4]高巍.工業互聯網推動工廠網絡與互聯網融合發展[J].中興通訊技術,2016,22(5):21-25.
[5]謝彤.基于以太網與現場總線的自動化實訓系統研究與實現[D].北京:北京郵電大學,2009.
[6]周麗婕.基于物聯網的高校實訓教學管理系統設計[J].物聯網技術,2014,4(10):90-92.
[7]張學輝.基于以太網和現場總線的工業控制網絡實訓系統設計[J].自動化儀表,2017,38(3):41-43.
[8]沈燦鋼,孫曉明.西門子全集成工業網絡實訓室設計與實現[J].實驗技術與管理,2015,32(2):170-172.
[9]邵澤華.物聯網結構的探索與研究[J].物聯網技術,2015,5(11):46-53.
[10]劉杰,戈軍,沈微微,等.公安物聯網體系架構的設計與實現[J].現代電子技術,2017,40(24):82-85.
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
環球時報(2016-08-01)2016-08-01 07:04:45