空中加油軟管-錐套動力學建模及仿真
2020-02-14 06:03:18張曉敏邵翥石佳雨
科技創新與應用
2020年1期
關鍵詞:仿真
張曉敏 邵翥 石佳雨


摘 ?要:為研究空中加油過程中軟管錐套的運動特性,采用有限元方法建立了軟管錐套組合體的穩態數學模型;利用該穩態模型計算了某型加油機在不同飛行速度和不同軟管長度情況下錐套的下沉量;加入加油機尾流速度模型,計算了尾流場對錐套位置的影響;在模擬器上驗證了文章所提出方法的有效性。
關鍵詞:空中加油;軟管-錐套動力學;建模;仿真
中圖分類號:V228.17 ? ? ? ? 文獻標志碼:A ? ? ? ? 文章編號:2095-2945(2020)01-0019-03
Abstract: In order to study the motion characteristics of the hose cone sleeve in the process of air refueling, the steady mathematical model of the hose cone sleeve assembly is established by using the finite element method. The steady-state model is used to calculate the subsidence of the cone sleeve of a certain type of tanker under different flight speed and different hose length. The influence of the wake field on the position of the cone sleeve is calculated by adding the wake velocity model of the tanker, and the effectiveness of the method proposed in this paper is verified on the simulator.
Keywords: aerial refueling; hose-cone sleeve dynamics; modeling; simulation
1 概述
得益于航空科技的飛速發展,空中加油技術在現代軍事領域已經得到了廣泛的應用,并且還正向民用領域逐漸擴展[1]。軟管式加油因具有成本較低,易于實現等優點,深受眾多國家青睞。在空中加油中軟管-錐套不可避免受到大氣紊流和加油機尾流場的干擾。國外對軟管-錐套建模的研究已較為成熟,提出了多種方法。本文利用有限元方法建立軟管-錐套組合體的穩態模型,計算了加油機在不同飛行速度和不同軟管長度情況下錐套的下沉量,并分析了加油機尾流場對錐套平衡位置造成的影響。
2 軟管-錐套動力學模型
軟管錐套組合體中軟管為柔性橡膠,錐套為金屬剛體,作用分別是傳輸燃油和輔助對接[2]。在平穩大氣中錐套的位置會隨著外部條件的變化而變化,在加油機尾流場的干擾下錐套還會發生飄擺,其復雜的氣動特性會極大地降低對接的成功率,因此需要進行準確建模。
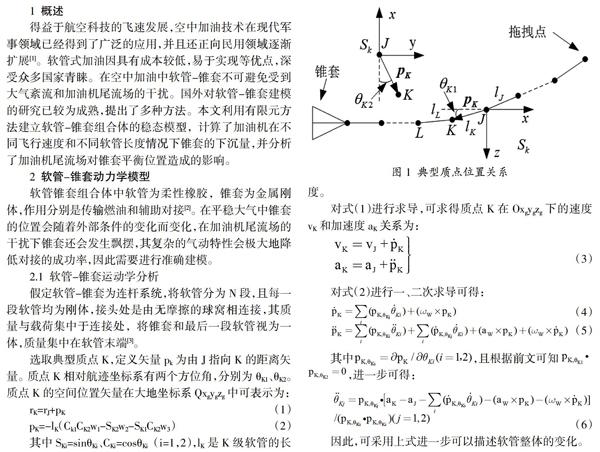
2.1 軟管-錐套運動學分析
假定軟管-錐套為連桿系統,將軟管分為N段,且每一段軟管均為剛體,接頭處是由無摩擦的球窩相連接,其質量與載荷集中于連接處,將錐套和最后一段軟管視為一體,質量集中在軟管末端[3]。……
登錄APP查看全文
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49