基于擴(kuò)展卡爾曼濾波模型的電動(dòng)汽車(chē)鋰電池SOC估算研究
2020-02-20 01:01:22高文哲
通信電源技術(shù) 2020年1期
高文哲,黃 濤
(1.四川長(zhǎng)虹電源有限責(zé)任公司,四川 綿陽(yáng) 621000;2.四川星輝諾通訊工程有限公司,四川 成都 610000)
0 引 言
汽車(chē)作為全球經(jīng)濟(jì)發(fā)展的動(dòng)力引擎,為世界各國(guó)經(jīng)濟(jì)快速增長(zhǎng)做出巨大貢獻(xiàn),但傳統(tǒng)燃油汽車(chē)所引起的能源安全問(wèn)題和環(huán)境污染問(wèn)題也逐漸被重視,世界主要大國(guó)都相繼制定了燃油汽車(chē)禁售時(shí)間,各大汽車(chē)生產(chǎn)廠商也都將新能源汽車(chē)作為未來(lái)發(fā)展方向[1]。鋰電池因其污染小、能量密度高、循環(huán)壽命長(zhǎng)等優(yōu)點(diǎn)被廣泛應(yīng)用于新能源(電動(dòng))汽車(chē)領(lǐng)域。鋰電池電荷狀態(tài)(State of Charge,SOC)估算作為新能源電動(dòng)汽車(chē)的關(guān)鍵技術(shù)之一,不僅與鋰電池使用壽命有關(guān),也與整車(chē)的穩(wěn)定性和安全運(yùn)行息息相關(guān)。
目前,國(guó)內(nèi)外研究人員對(duì)于鋰電池電荷狀態(tài)SOC估算的研究主要分為兩大類(lèi):一類(lèi)是基于鋰電池本身物理特性參數(shù)的SOC估算方法,包括安時(shí)計(jì)量法、電荷累積法、開(kāi)路電壓法等;另一類(lèi)是基于鋰電池模型參數(shù)辨識(shí)的SOC估算方法,包括神經(jīng)網(wǎng)絡(luò)法、卡爾曼濾波法以及擴(kuò)展卡爾曼濾波法等。其中電荷累積法對(duì)于系統(tǒng)初始值要求較高,開(kāi)路電壓無(wú)法用于工作中的鋰電池SOC估算,而神經(jīng)網(wǎng)絡(luò)法建模過(guò)程又較為復(fù)雜[2]。因此,本文將基于擴(kuò)展卡爾曼濾波模型對(duì)電動(dòng)汽車(chē)鋰電池SOC估算展開(kāi)研究。
1 鋰電池等效電路模型
鋰電池作為一個(gè)非線(xiàn)性系統(tǒng),其充電過(guò)程和放電過(guò)程均是一個(gè)復(fù)雜的非線(xiàn)性過(guò)程,為了便于研究,簡(jiǎn)化計(jì)算過(guò)程,一般是使用鋰電池的等效電路模型進(jìn)行SOC估算[3]。魏學(xué)哲等人根據(jù)鋰電池充放電特性提出了二階RC等效電路模型。該模型結(jié)構(gòu)簡(jiǎn)單、各參數(shù)物理意義明確,被廣泛應(yīng)用研究具體如圖1所示。
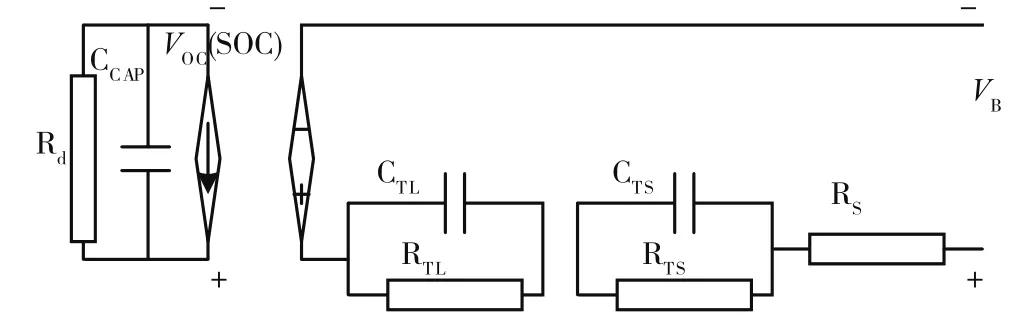
圖1 鋰電池二階RC等效電路模型
圖1鋰電池電路等效模型中電容CCAP表征了鋰電池存儲(chǔ)電量的能力,并使用受控電流源來(lái)進(jìn)行充放電;電阻RS和兩組并聯(lián)RC等效阻抗表征了鋰電池內(nèi)阻和暫態(tài)響應(yīng);開(kāi)路電壓VOC(SOC)表征了鋰電池的電動(dòng)勢(shì);等效電壓源連接表征了鋰電池SOC和開(kāi)路電壓VOC(SOC)之間的非線(xiàn)性關(guān)系;RTS和RTL表征了鋰電池的極化電阻;CTS和CTL表征了鋰電池的極化電容;其中RTS和CTS電路時(shí)間常數(shù)較小,模擬電流突變時(shí)電壓快速回彈過(guò)程,而RTL和CTL電路時(shí)間常數(shù)較大,模擬電壓逐漸穩(wěn)定的過(guò)程。
2 擴(kuò)展卡爾曼濾波SOC估計(jì)
2.1 擴(kuò)展卡爾曼濾波理論
卡爾曼濾波是在已知系統(tǒng)噪聲、數(shù)學(xué)模型和系統(tǒng)狀態(tài)初始值情況下,根據(jù)系統(tǒng)狀態(tài)方程和輸出方程的測(cè)量數(shù)據(jù)獲取系統(tǒng)狀態(tài)或參數(shù)的最優(yōu)估計(jì)值。其中標(biāo)準(zhǔn)卡爾曼濾波方法KF(Kalman Filter)只能處理線(xiàn)性系統(tǒng)的最優(yōu)估計(jì)問(wèn)題,而擴(kuò)展卡爾曼濾波方法EKF(Extended Kalman Filter)通過(guò)對(duì)非線(xiàn)性系統(tǒng)進(jìn)行Taylor級(jí)數(shù)展開(kāi),并使用一階展開(kāi)式對(duì)非線(xiàn)性系統(tǒng)進(jìn)行近似,然后再基于卡爾曼濾波的“估計(jì)-測(cè)量-修正”思想進(jìn)行估算,因此可用于非線(xiàn)性系統(tǒng)狀態(tài)或參數(shù)估算[4-5]。

其中,xk為系統(tǒng)狀態(tài)變量;uk為系統(tǒng)輸入值;yk為系統(tǒng)輸出值;wk為隨機(jī)干擾;vk為隨機(jī)噪聲。
將非線(xiàn)性函數(shù)f(xk, uk)和g(xk, uk)在估算值點(diǎn)xk泰勒展開(kāi),省去高次項(xiàng):

2.2 擴(kuò)展卡爾曼濾波SOC估計(jì)模型
根據(jù)戴維南定理,二階RC鋰電池電路等效模型可表示為:

其中,VB為鋰電池輸出電壓;VOC為鋰電池開(kāi)路電壓;VTS為CTS電壓;VTL為CTL電壓。
若將鋰電池SOC和電容CTL電壓VTL作為輸出變量,電流i(t)作為輸入變量,則二階RC鋰電池電路等效模型的電壓微分方程:
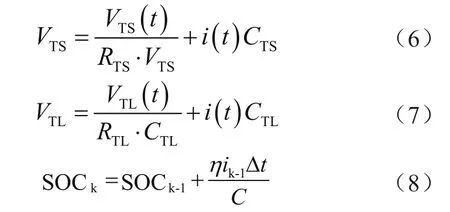
其中,ik-1為k-1時(shí)刻電流,其中充電時(shí)為正值,放電時(shí)為負(fù)值;η為庫(kù)倫系數(shù),由參數(shù)辨識(shí)過(guò)程獲得,一般充電時(shí)η=1,放電時(shí)η<1;C為電池容量;Δt為采樣時(shí)間,SOCk-1為鋰電池荷電狀態(tài)。
因此,根據(jù)微分方程可得到基于擴(kuò)展卡爾曼濾波模型的鋰電池SOC估算流程如圖2所示。

圖2 鋰電池SOC估算流程
2.3 仿真實(shí)驗(yàn)及結(jié)果
根據(jù)卡爾曼濾波方法原理,依照式(1)對(duì)鋰電池SOC估算方程(6)、(7)、(8)在特定點(diǎn)進(jìn)行雅克比矩陣求解得 Ak、Bk、Ck、Dk:

因此,在求得Ak、Bk、Ck、Dk后可得到基于擴(kuò)展卡爾曼濾波的鋰電池SOC估算模型如圖3所示。

圖3 擴(kuò)展卡爾曼濾波的鋰電池SOC估算模型
為檢驗(yàn)本文所建立的擴(kuò)展卡爾曼濾波鋰電池SOC估算模型的準(zhǔn)確性,本文將使用MATLAB/Simulink對(duì)前面給出的鋰電池等效電路進(jìn)行仿真實(shí)驗(yàn)。首先通過(guò)實(shí)驗(yàn)獲得18650鋰電池(3.7 V,2 000 mAh)模型參數(shù)VOC(SOC)、RS、RTS、CCAP、CTS、CTL,然后在 MATLAB 中建立圖3仿真模型,再基于擴(kuò)展卡爾曼濾波算法對(duì)鋰電池的剩余電量SOC進(jìn)行估算,仿真結(jié)果如圖4所示。

圖4 擴(kuò)展卡爾曼濾波鋰電池SOC估算誤差
由圖4中仿真結(jié)果可得,基于本文建立的擴(kuò)展卡爾曼濾波鋰電池SOC估算結(jié)果與鋰電池真實(shí)SOC值整體相差較小,主要集中在±0.04%區(qū)間,在仿真開(kāi)始初期誤差小于±0.02%,精度非常高,但隨著仿真的進(jìn)行,誤差逐漸增加,分析原因可能是在測(cè)量鋰電池真實(shí)SOC過(guò)程中,受環(huán)境因素影響或者其他測(cè)量誤差的累計(jì),導(dǎo)致模型誤差增加,但模型整體誤差不超過(guò)0.05%,滿(mǎn)足電動(dòng)汽車(chē)對(duì)鋰電池SOC估算的要求。
3 結(jié) 論
鋰電池作為一個(gè)復(fù)雜的非線(xiàn)性系統(tǒng),對(duì)其SOC估算較為困難。本文在鋰電池二階RC等效電路模型的基礎(chǔ)上,利用擴(kuò)展卡爾曼濾波方法適用于非線(xiàn)性系統(tǒng)的特點(diǎn),建立了基于擴(kuò)展卡爾曼濾波的鋰電池SOC估算模型;通過(guò)MATLAB/Simulink建模仿真分析,仿真結(jié)果顯示本文建立的擴(kuò)展卡爾曼濾波鋰電池SOC估算模型精度較高,小于±0.05%,滿(mǎn)足電動(dòng)汽車(chē)對(duì)鋰電池SOC估算要求,因此可用于實(shí)際應(yīng)用。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39