全自動餐具分類回收一體機的設計*
2020-02-25 05:00:40曹建猛王占瑞顏廷宇石姚林
機電工程技術 2020年1期
關鍵詞:分類
曹建猛,劉 敬,王占瑞,顏廷宇,石姚林
(濱州學院機電工程學院,山東濱州 256600)
0 引言
在學生餐廳、職工餐廳等公共飲食場所就餐人數較多,飯后會留下大量的餐具等待分類回收[1-2]。目前餐廳多采用人工分離回收餐具,這種分類方式速度慢、效率低且工作量大,而且隨著社會勞動力的短缺,人工成本也逐漸升高[3-4]。目前,市場上的餐具回收裝置以傳送、清洗功能為主,所附加的餐具分類功能不完善,不能將勺子、筷子、碗與餐盤進行有效分類收集,且食物殘渣得不到及時的回收[5-8]。餐具的分離需要完成勺子、筷子、碗與餐盤的分離,并將分離出的殘渣收集,若將這些工序由一臺機器連續完成,則能夠節約大量勞動力,并大大提高工作效率。為了克服現有技術的不足,本文設計了一款全自動餐具分類回收一體機,能夠代替人工實現餐具的分類回收,提高工作效率的同時改善就餐環境。
1 整體結構及設計理念
機器的整體尺寸根據實際需要設計,在充分考慮勺子、筷子、碗與餐盤的分離以及殘渣分離收集的功能需求下,構思并設計全自動餐具分類回收一體機的整體結構,以確保不同工序由1臺機器連續完成。
圖1所示為全自動餐具分類回收一體機的整體結構示意圖,主要由機架、勺子分離機構、傳送機構、飯筷篩選機構、飯筷分離機構和碗盤分離機構組成。將餐具放置于傳輸機構,當餐具經過勺子分離機構時,磁性轉盤將勺子吸起,擋勺板將勺子擋落在勺子滑軌,最終勺子落入勺子收集箱。餐具隨傳送機構向機器后方繼續傳輸,經過飯筷篩選機構時,在3根錯落布置的刷軸作用下,將食物殘渣和筷子掃落至飯筷分離機構。
清除殘渣后的碗和餐盤隨傳送帶運至后方的碗盤分離機構。筷子和食物殘渣落至飯筷分離機構后,隨推板在漏飯柵板上往復推移,殘渣從漏飯孔落入下方的殘渣收集箱,筷子則從柵板兩端落入筷子收集箱。
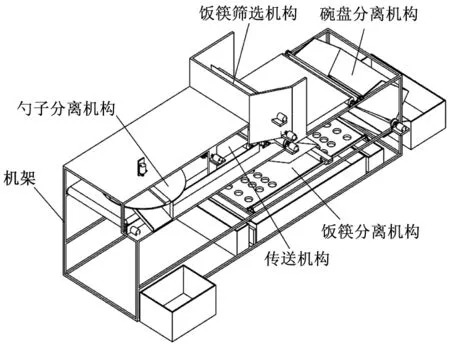
圖1 全自動餐具分類回收一體機結構示意圖
當碗和餐盤運至碗盤分離機構,落入該機構的篩選斗,篩選斗能夠上下往復振動,促使盤子從餐盤出口落入下方的餐盤收集箱,碗從出碗口落入下方的碗收集箱。
2 機械結構設計
2.1 勺子分離機構
該機構包括吸勺機構、勺子滑道和擋勺板,如圖2所示。吸勺機構由磁性轉盤、轉軸和轉盤電機構成,磁性轉盤上表面分布有強力磁鐵,磁性轉盤上表面與轉軸固接,轉軸通過聯軸器與轉盤電機相連。當餐盤上的勺子經過吸勺機構時,磁性轉盤將勺子吸附于下表面。擋勺板豎向設置,擋勺板上端與磁性轉盤下表面相切,下端固定在機架上,所述勺子滑道固定在擋勺板側面。當勺子隨磁性轉盤轉動至擋勺板處,勺子與吸勺機構分離,并沿固定于擋勺板側面的勺子滑道滑落于勺子收集箱中。
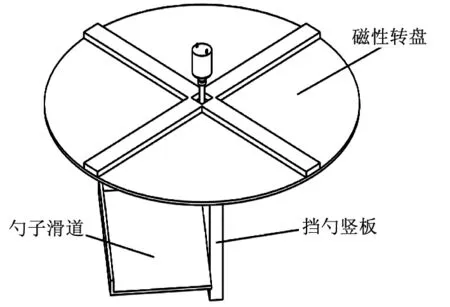
圖2 勺子分離機構示意圖
2.2 傳送機構
傳送機構由傳送帶、帶軸、滾軸和傳動電機構成,其中,傳送帶有2個,處于同一水平面并且沿傳送方向前后對稱設置。第1傳送帶位于機器前端,繞第1帶軸和第2帶軸轉動,第1帶軸通過聯軸器與第1傳送電機相連,第2傳送帶繞第3帶軸和第4帶軸轉動,第3帶軸通過聯軸器與第2傳送電機相連,第1傳送帶和第2傳送帶之間有一定距離(120~140 mm),2個傳送帶之間設置有與帶軸平行的滾軸,滾軸與2個傳送帶間距相等,且處于同一水平面;帶軸和滾軸兩端均通過軸承座固定在機架上;第3帶軸和滾軸的同一側均安裝有鏈輪,2個鏈輪通過傳動鏈條連接,傳動鏈條在豎直平面內轉動,如圖3所示。
2.3 飯筷篩選機構
飯筷篩選機構主要包括第1刷軸、推碗軸、第2刷軸,其中推碗軸上等間隔固定4個推碗板,如圖3所示。第1刷軸位于第1傳送帶的中部上方,與第1傳送帶間的豎直距離為80~100 mm,當第1刷軸轉動時,刷毛可以深入碗內將殘渣掃出。推碗軸和滾軸在同一豎直平面且與滾軸間的豎直距離為100~120 mm,當推碗軸在電機帶動下轉動時,推碗板隨之旋轉,推動碗越過第2刷軸至第2傳送帶上,碗繼續向機器后方傳送;所述第2刷軸將筷子及殘渣與餐盤分離,第2刷軸位于第2傳送帶起始端,與第3帶軸位于同一豎直平面內,第二刷軸與第2傳送帶間的豎直距離為20~30 mm,此豎直距離只有餐盤可以通過;飯筷篩選機構的工作過程為,當餐具經過飯筷篩選機構時,第1刷軸將碗中殘渣掃出,推碗軸帶動推碗板將碗推至第2傳送帶,餐盤從第2刷軸下方經過,第2刷軸將餐盤中的食物掃落在下方的飯筷分離機構。
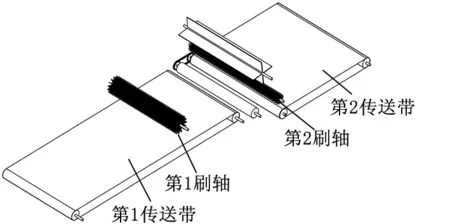
圖3 飯筷篩選和傳送機構的位置關系示意圖
2.4 飯筷分離機構
飯筷分離機構主要包括漏飯柵板和飯筷推板,如圖4所示。其中,漏飯柵板上開有漏飯孔,漏飯孔交錯分布且直徑小于筷子長度的1/2,飯筷推板與漏飯柵板相切。飯筷分離機構的工作過程為,當飯筷落在漏飯柵板上時,往復運動的飯筷推板將飯筷來回推動,在推動過程中筷子隨飯筷推板平行前進,食物殘渣從漏飯孔落入下方的殘渣收集箱,筷子則從漏飯柵板兩端落入下方的筷子收集箱。
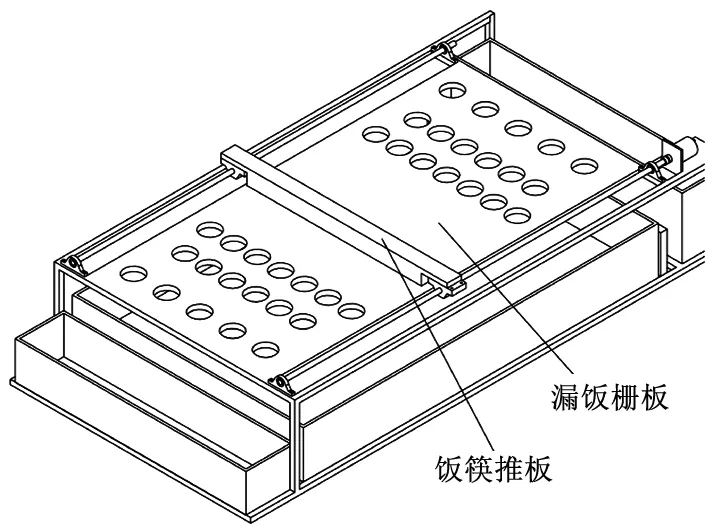
圖4 飯筷分離機構
2.5 碗盤分離機構
碗盤分離機構主要包括篩選斗、上下往復振動機構,如圖5所示。篩選斗設置在機器后端,并與第2傳送帶末端承接,篩選斗的底板傾斜設置,底板末端開有寬為100~120 mm的出碗口,篩選斗底板下端開有寬10~15 mm的餐盤出口,所述上下往復振動機構包括第2光軸、偏心振動輪、第3光軸、振動電機組成,振動電機固定在機架上,振動電機工作時帶動偏心振動輪轉動,進而實現篩選斗的上下振動。碗盤分離機構的工作過程為,當碗和餐盤落入篩選斗,沿篩選斗底板下滑,最終碗從出碗口落入下方的碗收集箱,餐盤從餐盤出口滑出,落在下方的餐盤收集箱,整個過程振動機構不停振動篩選斗,使分離更加順暢。
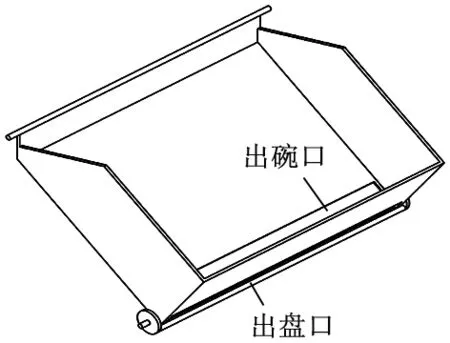
圖5 碗盤分離機構
3 控制系統
為使機器各機構能夠合理順暢的工作,該機器以機電一體化為基礎,通過控制系統對全自動餐具分類回收一體機進行集成控制,實現勺子分離、飯筷篩選、飯筷分離、碗盤分離等一系列處理工藝的自動化。
本研究所設計的控制系統以STM89C51單片機為控制核心,同時采用L298N電機驅動器、光電傳感器和降壓模塊等電器元件進行輔助,實現餐具的自動分類回收功能。在模塊電源方面設計了過流和過壓保護,進一步增加控制系統抵抗電壓和電流的沖擊能力。
4 樣機制作與試驗
依據如上設計對樣機進行試制并試驗餐具分類回收效果。結果表明:該機器能夠順利實現餐具分類回收的自動化,每分鐘可分類6~10套餐具;食物殘渣去除率達78%~85%,未去除的食物殘渣主要集中在餐盤底部,對餐具表面的破壞程度小;傳輸機構可流暢連續地進行傳送;經試驗,設定磁性轉盤的旋轉速度為30~50 r/min,振動盒的振動頻率為20~40次/min,飯筷推板運動速度為5~10 cm/s。后期改進可考慮在碗盤分離機構上附加水管,以便及時沖洗碗盤。

圖6 全自動餐具分類回收一體機樣機
5 結束語
本文設計了一款新型全自動餐具分類回收機,各機構在控制系統的配合下能夠自動實現勺子、筷子、碗盤及殘渣的分類回收,不僅能夠大大提高工作效率,還能節約大量勞動力,該機器可用于就餐人口密集的學生食堂、員工餐廳,具有廣闊的應用前景。
猜你喜歡
西北民族大學學報(自然科學版)(2021年4期)2021-12-29 02:54:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學生天地(2019年32期)2019-08-25 08:55:22
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46