高速磁浮列車供電分區及定子段設計方法研究
2020-03-02 08:07:52魏遠樂郝文瑾劉建強
鐵道建筑技術 2020年12期
關鍵詞:設計
魏遠樂 郝文瑾 劉建強
(1.中土集團福州勘察設計研究院有限公司 福建福州 350013;2.北京交通大學電氣工程學院 北京 100044)
1 引言
作為新型軌道交通工具,高速磁懸浮列車采用了磁懸浮技術,運行過程中車輛與軌道無接觸運行,避免了輪軌黏著力對速度的限制。相比于傳統輪軌列車,速度有極大程度的提升,有效地填補了飛機與高速輪軌列車間的空缺,為乘客提供了更加高效的出行方式。
高速磁懸浮列車一般分為牽引供電系統、懸浮和導向系統、運行控制系統、渦流制動系統等[1]。其中,牽引供電系統與高鐵列車相似,包含輸入輸出變壓器、牽引變流器及牽引電機等。但與高鐵列車的不同在于,磁浮列車的牽引變流器放置于軌道沿線的變電所中,同時其牽引電機采用長定子直線同步電機,電機定子即為列車的軌道。運行過程中,出于對效率、能耗等方面的考慮,需要對變流器及定子進行分段布置。而牽引變流器的布置及電機定子段的長度直接決定了磁浮列車的牽引特性。但目前對于高速磁浮列車牽引供電系統的研究,主要集中于磁浮列車的牽引及供電控制方面,例如文獻[2-4]主要研究了磁浮列車電機的矢量控制及無速度傳感器控制;文獻[5]主要研究了磁浮列車供電系統的換步控制。上述文獻中均采用上海磁浮列車所使用的1 200 m定子段長度,而對實際供電分區及定子段情況沒有進行具體分析及理論計算。
針對上述情況,本文對高速磁浮列車結構進行了分析研究,在此基礎上,根據磁浮列車的運行特性,提出了一種高速磁浮列車供電分區及定子段設計方法,基于高速磁浮列車的頂層指標,結合列車最小時分運行工況,計算得到磁浮列車供電分區的長度、變流器輸出容量、變壓器變比、定子段長度等相關設計參數。同時,基于所提出的設計方法,設計開發了高速磁浮列車牽引運行仿真平臺,以京滬線的線路數據為例對實際線路進行了牽引供電分區及定子段的劃分,驗證了所提出的相關設計方法的可行性。
2 高速磁浮列車牽引供電結構
2.1 供電結構
磁懸浮列車運行過程中,其牽引變流器設備放置在軌道沿線的變電站中。對于電機定子段的供電,可以由牽引供電分區的一側供電,也可以由牽引供電分區的兩側供電[6-8]。圖1為列車單供電方式示意圖,將線路分成了多個牽引區段。而在每個牽引區段又基于能耗的原因將定子分為圖2所示的交錯布置的定子段。

圖1 供電方式示意

圖2 定子段示意
2.2 電機結構
常導高速磁浮列車一般采用扁平型長定子直線同步電機[9-10]。電機的電樞繞組沿軌道排布,定子鐵芯采用分段形式構成,每一定子段由0.5 mm硅鋼片粘結而成。鐵芯上均勻整距分布有開口槽,電樞繞組采用多芯鋁導線的集中繞組組成。電機的勵磁繞組放置在轉子的大槽內,同時轉子電磁鐵的極靴上開有小槽用來安裝發電機繞組。長定子直線同步電機的電樞和勵磁磁極的極距值一般相差一個電樞槽距的十分之一,用來削弱齒諧波。
磁浮列車牽引直線電機在運行過程中由地面變電站給電機電樞提供幅值和頻率可變的三相交流電,該三相交流電在氣隙中生成行波磁場,磁場的速度取決于定子繞組的供電頻率[11-12]。車體上的轉子繞組由車載蓄電池提供一個直流電從而生成一個恒定的磁場,隨車輛進行運動。對于列車的牽引系統而言,氣隙中同時存在電樞磁場和勵磁磁場,電樞磁場帶動勵磁磁場進行同步運行的過程中存在一個水平方向的作用力,該作用力將驅動列車克服阻力進行運動。
基于上述分析,可得電機的等效電路及矢量圖見圖3~圖4。

圖3 電機等效電路
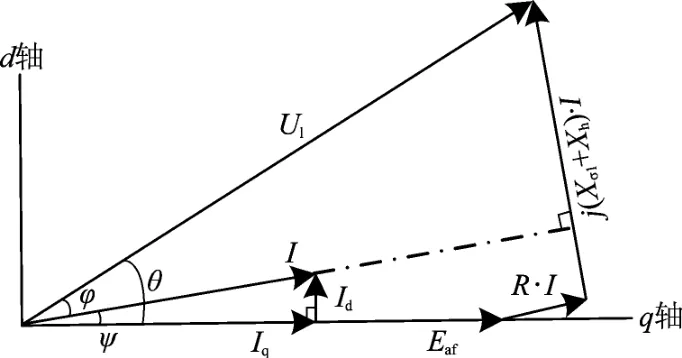
圖4 電機矢量圖
3 供電分區及定子段設計思路與方法
3.1 牽引特性曲線
列車供電分區及定子段設計方法主要基于額定的牽引特性曲線開展計算。而牽引特性曲線又與牽引電機額定電壓相關。
設計過程中,認為磁浮列車一個懸浮架對應一臺牽引電機。其中,磁浮列車單臺牽引電機功率為:

以6輛編組為例,結合電機功率計算公式可得列車額定的牽引特性曲線和電制動特性曲線,見圖5~圖6。

圖5 牽引特性曲線

圖6 電制動特性曲線
3.2 列車阻力特性
高速磁浮列車運行過程中主要受到以下幾種運行阻力的影響:
(1)空氣阻力
當列車未受到側風影響時,其空氣阻力為:

式中,v為列車運行速度;Wx為列車運行時的空氣阻力系數。
當列車受到側向風作用時,其空氣阻力為:

式中,vw為垂直列車運行方向的風速。
(2)直線發電機的運行阻力

式中,ns為列車編組車輛數。
(3)線路兩側導軌上的電磁渦流阻力

因此,高速磁浮列車總的運行阻力為:

3.3 列車運行速度、位置及驅動功率
列車供電分區及定子段設計方法主要基于列車的最小時分運行過程開展計算。列車的最小時分運行過程主要包括牽引工況、勻速工況及制動工況三種。在實際運行過程中,常用單位合力cp,即列車合力C與列車重力之比來表示列車受力情況,則有:

式中,C為列車合力;M為列車的質量;g為重力加速度。
因此,列車運行過程中速度及距離的變化量可表示為:

式中,Δv為列車速度變化量;cp為列車單位合力;Δs為列車行駛距離變化量;Δt為單位時間間隔。
結合列車的運行速度及距離,可得高速磁浮列車在實際運行過程中的驅動功率。
(1)當列車運行在無風、平直道時,列車驅動所需視在功率為:

式中,W為列車運行阻力;as為列車剩余加速度;η為電機入端效率;cosφ為電機功率因數。
(2)當列車運行在有風、平直道時,列車驅動所需視在功率為:

式中,Kv為空氣阻力修正系數。
(3)當列車運行在有風、坡度為i的坡道上時,列車驅動所需視在功率為:

式中,i為線路坡道千分度。
3.4 區間線纜參數
由前文列車牽引供電結構分析可知,列車的電機放置在軌道上,而列車牽引變流器設備沿軌道布置,并通過各供電分區的電纜向列車供電。因此,在設計過程中需要考慮區間線纜參數的影響。
其中,區間線纜的電抗為:

區間線纜電阻為:

則可得區間線纜壓降為:

式中,I為長定子電流基波有效值。
3.5 供電分區及定子段設計
磁浮列車供電分區的設計主要遵循磁浮列車的行車原則,即每個供電分區內只能有一列列車運行。因此設計過程中,首先基于3.3節計算得到列車全線運行的距離-時間及功率-時間曲線,然后設定列車最小追蹤間隔時間,并以該時間為基準對上述兩條曲線進行劃分。
(1)對于距離-時間曲線,以最小追蹤間隔時間劃分,可以得到各牽引變流器放置位置的里程標。
(2)對于功率-時間曲線,以最小追蹤間隔時間劃分,可以得到各牽引區段最大功率值,并將其與列車電機額定功率進行比較,所得比值即為每個供電分區所應采用的變壓器變比值。
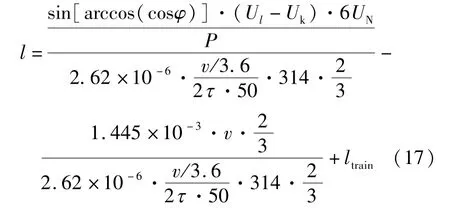
電機定子段長度的設計則需要綜合考慮列車速度、驅動功率、線路條件、電機參數等各方面的要求。因此,在供電分區設計基礎上,通過對如圖4所示的磁浮列車牽引電機矢量圖分析,可得:

式中,Xσ1為電機長定子總漏抗;Xh為直線電機總電抗;Ul為變流器輸出電壓;UN為電機額定電壓;Uk為區間線纜壓降;v為列車速度;τ為電機極距;l為定子段長度;ltrain為列車長度;P為對應供電分區最大功率值;φ為電機功率因數角。
由式(16)可得定子段長度為:
綜上所述,磁浮列車供電分區及定子段設計方法主要分為以下幾個步驟:
步驟一:配置列車的頂層指標,包括列車車重,電機電壓、電流、效率、功率因數,列車剩余加速度等相關參數;
步驟二:基于3.3節計算公式計算得到列車全線的運行速度、距離及運行功率,獲得列車的v-t曲線、s-t曲線及P-t曲線;
步驟三:遵循一個供電分區只有一列列車運行的行車原則對列車全線距離及功率進行劃分,得到各供電分區的劃分長度、功率值及變壓器變比;
步驟四:結合步驟三中計算得到的各供電分區長度及功率值,利用式(17)完成各供電分區定子段長度設計。
具體的設計方法流程見圖7。

圖7 設計方法流程
4 實例分析
為了進一步分析驗證所提出的磁浮列車牽引供電分區及定子段設計方法的可行性,基于上述計算方法設計了磁浮列車的軟件計算平臺。該計算平臺基于Matlab/GUI功能進行設計開發,通過配置實際的磁浮列車線路條件完成對供電分區和定子段的設計。
驗證過程中,以京滬線路的實際線路條件為例進行分析研究。京滬線路全程距離1 311.5 km,采用最小時分運行方式。運行過程中采用的列車頂層指標及牽引電機參數見表1,列車的剩余加速度配置見表2。

表1 設計參數
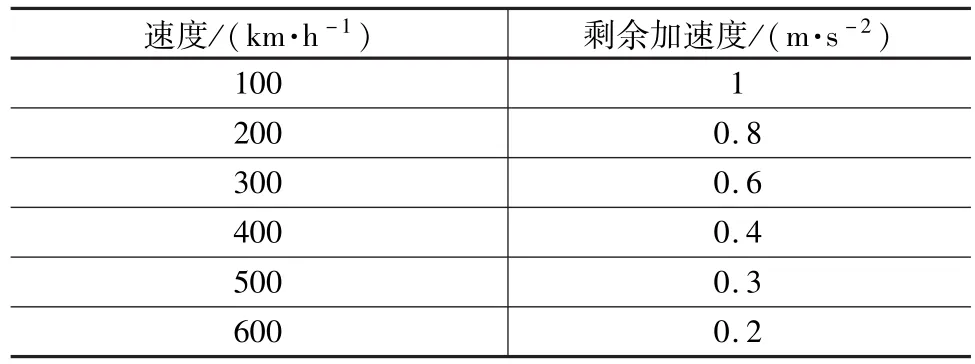
表2 剩余加速度
基于上述設計參數及所配置的列車剩余加速度,利用計算平臺得到實際線路條件下的供電分區設計情況見圖8。可以看出,在所設定的京滬線路中,高速磁浮列車共可以分為16個牽引供電分區,每個供電分區根據實際線路運行條件的不同采用不同的變流器容量及變壓器變比。

圖8 供電分區設計
在不同的供電分區中,由于其變流器容量不同,且列車的速度、驅動功率等均不相同,因此需要單獨考慮每個供電分區的實際情況來設計電機定子段長度。以第1供電分區和第5供電分區為例,所展示的定子段見圖9。可以看出,第1供電分區采用1 356 m的定子段長度,第5供電分區采用1 283 m的定子段長度。與目前高速磁浮列車常采用的1 200 m定子段長度近似。同時,由于磁浮列車特殊的換步需求,因此使得其左右兩側的軌道定子段采用交錯布置。

圖9 定子段設計
5 結論
高速磁浮列車采用長定子直線同步電機進行牽引運行,實際過程中,需要對變流器設備的安裝位置及牽引電機定子段的長度進行設計以滿足磁浮列車實際的運行需求。本文通過分析高速磁浮列車供電系統及牽引電機的結構,建立了電機的等效電路圖及電機矢量圖。在此基礎上,根據列車的牽引、電制動特性曲線及列車的阻力特性,并結合磁浮列車最小時分運行特點,提出了一種高速磁浮列車供電分區及定子段設計方法,通過配置列車頂層指標,計算列車全線速度、距離、驅動功率,從而依據行車原則及電機特性完成對列車供電分區及定子段的劃分。基于此方法設計開發了高速磁浮列車牽引運行仿真平臺,并以京滬線的線路條件為例進行了供電分區及定子段的設計,驗證了設計方法的可行性,為后續高速磁浮列車的設計及應用提供理論幫助。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04