基于激光追蹤測量的電氣控制系統研究
2020-03-03 14:36:17侯鈺郭偉濤
今日自動化 2020年10期
侯鈺 郭偉濤
[摘? ? 要]在基于激光追蹤測量的電氣控制系統研究過程中,通過四象限光電傳感器的應用,實時測量激光束光斑偏移量,并在可編程多軸運動控制器中對輸入的偏移量進行處理,同時與伺服電機構成閉環系統相結合,PID利用工程整定方法進行有效調節,能夠滿足激光追蹤測量系統測量的快速性、平穩性以及實時性測量要求。通過相關試驗可以證明,此控制系統有著良好的追蹤性能良好,并且運行狀態平穩。本文應基于激光追蹤測量系統原理的,可用于激光追蹤測量的電氣控制系統進行研究,確保控制信號的實時傳送及精密追蹤能夠最終實現。
[關鍵詞]激光追蹤測量;電氣控制系統;PID
[中圖分類號]TP273;TN249;TM383.4 [文獻標志碼]A [文章編號]2095–6487(2020)10–00–03
Research on Electric Control System Based on Laser Tracking Measurement
Hou Yu,Guo Wei-tao
[Abstract]In the research process of the electrical control system based on laser tracking measurement, through the application of the four-quadrant photoelectric sensor, the laser beam spot offset is measured in real time, and the input offset is processed in the programmable multi-axis motion controller At the same time, combined with the servo motor to form a closed-loop system, PID uses engineering tuning methods for effective adjustment, which can meet the rapid, smooth and real-time measurement requirements of the laser tracking measurement system. Correlative tests can prove that this control system has good tracking performance and stable operation. This article should be based on the principle of laser tracking measurement system, which can be used for laser tracking measurement of electrical control system to study, to ensure that the real-time transmission of control signals and precise tracking can be finally realized.
[Keywords]laser tracking measurement; electrical control system; PID
隨著工程測量技術及以精密工業的快速發展,在汽車工業、航天、航空、造船等行業中得到廣泛應用,同時對測量精度以及范圍的要求越來越高,其中基于激光跟蹤測量的電氣控制系統具有測量動態性能良好、測量范圍大以及可實現現場實時測量等優勢,因此加大此系統的研究力度,有著重要的現實意義。
1 激光追蹤控制原理概述
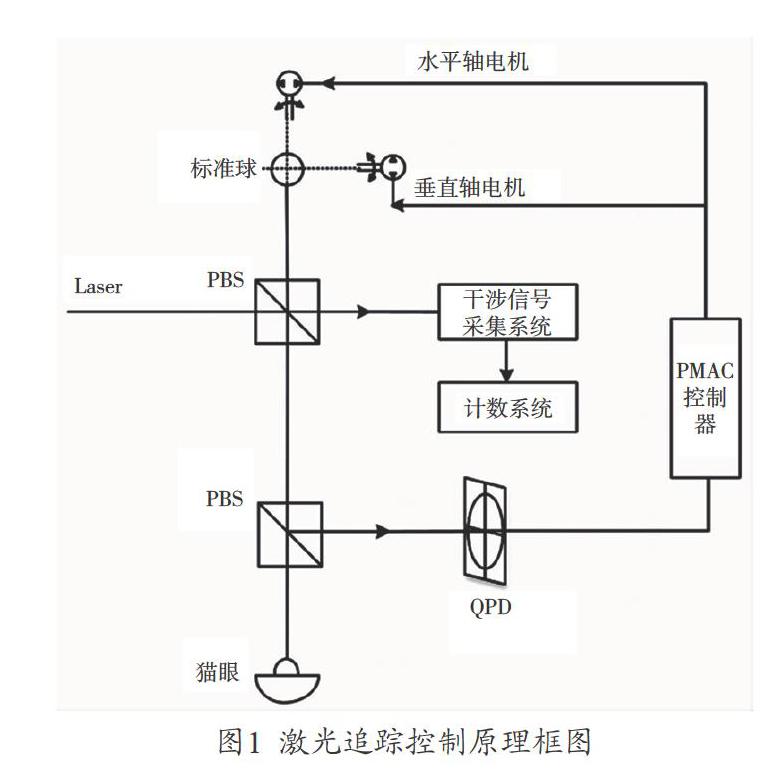
激光追蹤控制原理主要為:激光光束從光源發出并通過偏振分光鏡處理形成透射光及反射光2種光束,前者為參考光束,后者為測量光束[1]。后者再經過貓眼反射及分光鏡處理又形成一束穿透PBS的光束,以及經過PBS反射的光束,前者由其所照射的標準球反射后,經PBS再次反射,在干涉信息采集系統中此光束與參考光束共同形成了干涉信號,通過光電信號器對此類信號進行接收、處理,并輸入至計數系統中對貓眼移動距離進行計算;后者反射至四象限光電傳感器中,通過傳感器對貓眼位置移動量進行感知,一旦貓眼出現移動時,光斑與四象限光電傳感器中心位置出現偏離,并形成位置信號,PMAC控制器將采集及處理后的信號對與兩軸系相連的伺服電機進入控制,使激光光束對貓眼集位移的有效追蹤測量得以實現。其控制原理如圖1所示。
2 系統設計概述
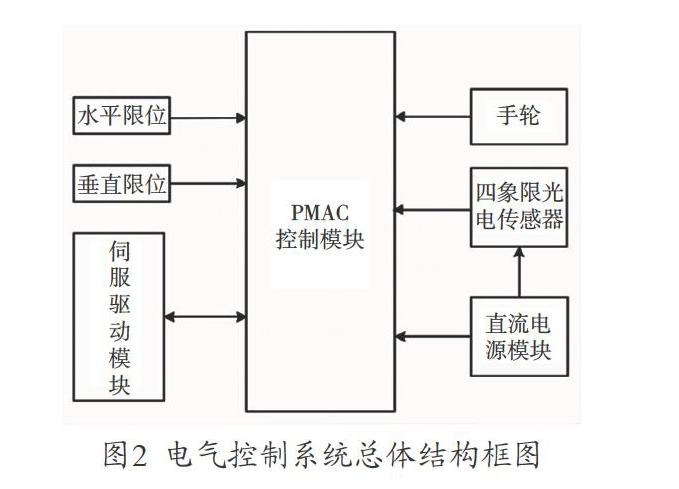
在進行追蹤測量過程中,電氣控制系統需要對激光追蹤測量系統運行進行實時控制,使系統安全性得到有效保障。電氣控制系統主要核心為PMAC控制器,同時水平軸電機和垂直軸電機運轉由伺服驅動模塊進行控制,兩者共同構成閉環控制單元。在進行光斑偏移量實時測量中,通過四象限光電傳感器的運用,并利用控制器對偏移量信號進行處理。另外控制系統可借助電子手輪的操作,實現自動和手動控制的自由切換,在進行系統運行前,對光斑在傳感器上的位置進行調整,保證其處于傳感器的中心位置。同時伺服電機運動范圍利用垂直限位開關和水平限位開關進行有效限定,從而確保追蹤測量系統運行的安全性。其中電氣控制系統總體結構如圖2所示。
首先需要對追蹤測量系統進行開機檢測,確保正常后對光斑在傳感器中心位置進行測量,如光斑不在中心位置,可利用手輪對其位置進行有效調整,確保其處于傳感器中心位置,如光斑已處于中心位置,再開啟系統對貓眼進行測量追蹤。同時系統對限位信息進行實時檢測,如啟動限位開關,則追蹤測量系統停止運行。
2.1 控制模塊
在高精度激光追蹤測量系統運用中,需要對追蹤伺服加強控制,并且其控制性能能夠對追蹤測量系統的追蹤精度和速度產生直接影響作用。系統控制單元主要可采用PMAC運動控制器系列的運動控制卡[2]。運動控制卡可對各類任務進行優先級別自動判斷,使多任務實時處理得以實現,使系統控制精度及運行速度有效提高。目前所采用的四象限光電傳感器對激光光束偏移量進行測量時,其感光靈敏度的典型值可達到0.6 A/W,光敏面面積可達到9 mm×9 mm。另外系統可利用電子手輪的功能實現自動和手動的控制切換,其功能主要有:對電機移動方向,以及電機啟動、急停、停止進行控制,并對電機移動速率進行調整。電子手輪與控制卡通過端口進行相連;控制卡與限位開關及伺服驅動模塊利用四通道轉接板進行邊接,位置信號經過光電傳感器模塊,利于AD轉接板傳輸至控制卡。
2.2 調節伺服電機PID參數
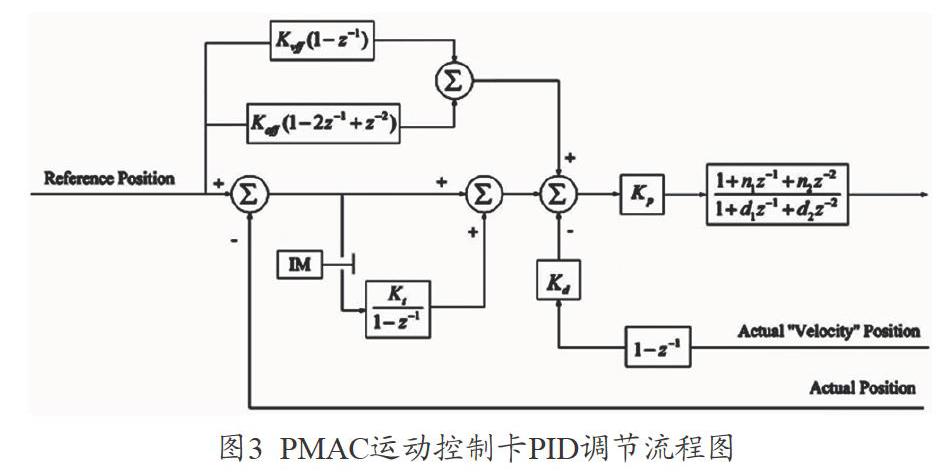
在追蹤測量系統中,由于信號進入編碼器,再與指令信號進行比較運算之間存在延時,通過前饋控制的引入,能夠使系統延時時間有效減少,并對伺服電機的PID參數進行調節,硼保控制效果最佳,并將其在執行命令軌跡中加以應用,使反饋時間有效節約,位置誤差建立可予以忽略,只需要對此估計中的誤差予以反饋。控制卡PID調節流程如圖3所示。
如圖3所示,比例增益系數為Kp,積分增益系數為Ki,陷波系數為n1、n2、d1、d2,積分模式為IM,Kd為微分增益系數,加速度前饋系數為Kaff,速度前饋系數為 kVff[3]。其中系統快速性受到比例增益系數的大小的直接影響,比例增益系數越大時,系統調節精度越高、響應速度越快,但系數一旦過大,會使系統不穩定性增加,如系數過小,會降低調節精度。積分增益系數可對系統靜態誤差予以消除,此系數若過大,會加大系統振蕩次數;系數若過小會影響系統調節精度。微分增益系數對系統動態特性有改善作用,但如此系數過大或過小,都會加大超調量,造成系統調節時間過長。因此需要對適宜的量值進行合理選擇,才能確保最佳過渡過程的實現。另外速度前饋系數主要能夠使微分增益或補償電機環路阻尼所帶來的跟隨誤差減少,加速度前饋系數對因慣性所帶來的跟隨誤差進行補償。
3 相關試驗分析
通過對追蹤測量系統展開相關試驗,能夠進一步對激光追蹤電氣控制系統性能進行驗證。首先對伺服電機PID前饋控制參數進行調整,保障電機平穩運行,再通過追蹤測量試驗的實施,對系統追蹤速度和精度進行觀察。
3.1 PID調節試驗
首先通過閉環控制伺服電機的選用,能夠使低速運行平穩、回轉精度高、響應速度快、啟動電壓低等要求得滿足,PMAC控制器對電機進行有效控制,使其能夠準確、快速地移動至目標位置。
控制器通過相關軟件工具的應用,能夠實現P參數的有效調節,還能對電機速度及加速度特性進行優化。通過對比例增益系數及微分增益系數進行設計,使執行階躍響應得以實現,有效提高和保障系統運行的穩定性及高效性。另外系統的阻尼較小或者剛性較大時,會導致脈沖響應曲線出現振動和超調現象,可對參數進行不斷調整,從而使系統控制實現最優化。
對階躍響應進行有效調整后,對正弦波響應曲線進行觀察,從而實現對前饋參數和積分增益系數的有效調節,使系統跟隨誤差減少。在追蹤測量系統伺服電機正弦波響應曲線中,實際運動曲線與指令位置曲線之間相近似,如實際速度曲線出現毛刺現象,則表示電機運動過程中存在震動情況,通過相關測試表明,此現象對電機跟隨不產生影響。另外跟隨誤差可利用前饋參數進行調節,使其在零點處進行上下浮動[4]。響應曲線圖如圖4所示。
3.2 追蹤測量試驗結果
在直線導軌上,通過螺旋微動平臺進行貓眼安裝,并經過開機檢測后,確保檢測無誤再開啟手輪,對光斑位置進行調整,確保其處于傳感器中心,通過螺旋微動平臺的控制,使貓眼沿直線導軌進行勻速移動,同時追蹤系統對貓眼移動進行實時跟蹤,當光斑位置再次移動對傳感器中心,則可停止追蹤,對控制系統的追蹤時間進行記錄。通過相關試驗結果可以發現:在貓眼移動過程中,追蹤系統進行自動追蹤,并對光斑進行控制,使其回到傳感器中心的平均時間為0.259 ms,方差為σ2=3×10-7。
4 結束語
為了使目標靶鏡的精密追蹤測量得以實現,就基于激光追蹤測量原理的激光追蹤電氣控制系統加強研究,通過PMAC控制器對伺服進行有效控制,并對PID前饋控制加強調節,使電機閉環控制得以實現,電機響應速度提高,從而對系統平穩運行予以保障。另外利用四象限光電傳感器進行相關激光追蹤測量試驗,通過試驗可以看出,此測量系統具有追蹤速度較快的優點,并且能夠對貓眼移動實現實時追蹤,并且能夠確保整個運行過程的平穩性。
參考文獻
[1] 孫衍強,陳洪芳,石照耀,等.基于ESO-CPC的激光追蹤測量系統電機仿真方法[J].哈爾濱工程大學學報,2020,41(2):235-242.
[2] 王巍,周天一,王誠鑫.基于激光跟蹤儀測量系統的翼身對接技術研究[J].裝備制造技術,2018(10):209-212,226.
[3] 姜博.激光追蹤多站位測量技術的應用研究[D].北京:北京工業大學,2019.
[4] 陳洪芳,孫衍強,王亞韋,等.高精度激光追蹤測量方法及實驗研究[J].中國激光,2018,45(1):160-167.