基于虛擬耦合的列車群體智能控制技術研究及展望
2020-03-04 06:56:10劉嶺
鐵路通信信號工程技術 2020年2期
劉 嶺
(1.北京全路通信信號研究設計院集團有限公司,北京 100070;2.北京市高速鐵路運行控制系統工程技術研究中心,北京 100070)
1 概述
利用閉塞方式的列車運行控制方法在世界范圍內廣泛使用。歐洲采用歐洲列車控制系統(ETCS)和歐洲鐵路運輸管理系統(ERTMS),主要實現列車運行控制和鐵路運輸管理,保障列車在鐵路網絡中的安全運行和鐵路網絡中運輸資源的合理配置及使用[1-3]。美國曾于20 世紀80 年代開發了先進列車控制系統(ATCS),之后,列車加強型控制系統(ITCS)、先進列車自動控制系統(AATC)、列車間隔控制系統(PTS)相繼研制并投入使用[4]。日本最廣為人知的運輸管理系統分別是計算機和無線電輔助列車控制系統(COMTRAC)與新干線列車運行管理系統(COSMOS),其自行研制的列車自動控制系統(ATC)保障了列車安全高效行車[5]。
基于閉塞的列車控制通常采用地面中心設備集中發布行車指令的控制方法,而集中式的信息處理方式對更加快速、安全的信息處理要求適應性較差,隨之產生了分布式的信息處理技術。分布式的群體協同控制成為提升復雜列車控制系統效率的一個重要手段。作為人工智能5 大發展方向之一的群體智能技術為群體協同控制方法提供了新的支撐。群體智能技術能夠高效解決復雜的組合優化類問題,并已廣泛應用于交通領域[6-9]。近年來,MAS 理論在列車群體控制方面進行了初探,并在鐵路貨運方面取得一定的研究成果[10,12]。
1999 年,Bock U 等提出“虛擬耦合”的概念,概述了虛擬耦合列車系統設計與研發的相關方法,并探討了在貨物運輸中的技術研究[13,14]。日本學者Tilo Schumann 采用DFSimu 工具模擬虛擬耦合方式,東京到大阪新干線每小時每個方向運量能 夠 從15 000 增 加 到23 000 人 次。2015 年5 月歐洲全面啟動的“構建未來鐵路系統聯合行動計劃(Shift2Rail)”[15]提出了虛擬耦合列車的研究方向,虛擬耦合列車是指多個列車之間不依靠物理連接,而是通過無線通信實現多列車以相同的速度、極小的間隔的列車群體協同運行方式。
近年來群體智能和車聯網技術的發展為采用新興技術解決列車運行控制效率問題提供了新機遇。同時,隨著軌道交通網絡日趨完善、運輸壓力日漸增加,運輸能力緊張問題亟待解決,通過提高列車運行控制效率提升軌道交通運輸能力問題顯得尤為重要。本論文在闡述列車運行控制方法的基礎上,著重刻畫基于虛擬耦合的列車群智能控制方法,提出基于虛擬耦合的列車控制及調度的系統框架,設置仿真場景對該方法的有效性進行驗證,并從深化復雜場景下的基礎理論研究、強化系統安全設計技術研究、加快系統設計及產業化技術研究等方面提出基于群體智能列車控制的研究發展方向。
2 列車運行控制方式的發展
2.1 基于閉塞的列車運行控制方法
基于閉塞的列車運行控制方式主要有固定閉塞、準移動閉塞和移動閉塞[16]。固定閉塞,通常由基礎定位設備將鐵路線路劃分為一些閉塞分區,每個分區內規定有運行速度上限,各個閉塞分區速度不連續,呈階梯分布,以此保障列車與前行列車安全距離。準移動閉塞,利用目標―距離控制方式,采用一次制動曲線,控制安全行車,但移動授權終端依然為閉塞分區固定邊界。移動閉塞,則是徹底突破固定閉塞概念,閉塞分區邊界不固定,隨著列車運行而自動更新,列車的移動授權可到前行列車尾部。移動閉塞,可分為基于位置的移動閉塞和基于速度的移動閉塞,前者在列車追蹤運行過程中只考慮前行列車位置,后者除考慮前行列車位置外,還考慮前行列車速度。
根據上述分析可知,閉塞方式的演化主要通過不斷縮小列車最小運行間距從而提高列車運行效率。列車最小運行間距是指列車在運行過程中,在保證列車間不發生碰撞等安全風險的前提下,相鄰兩列車在追蹤運行過程中,兩列車車頭之間能夠達到的最小運行間距。如圖1 所示,表示不同閉塞方式下列車的最小運行間距。
在固定閉塞模式下,列車間最小運行間距依托閉塞分區的計算方式,該值相對固定。準移動閉塞綜合列車的運行曲線與閉塞分區的方式,列車最小運行間距有一定的減少。在基于位置和速度的兩種移動閉塞模式下,列車最小運行間距隨列車狀態呈現動態變化的特性,其中,基于速度的移動閉塞由于考慮了前車速度和加速度,因此列車間最小運行間距小于基于位置的移動閉塞模式,列車運行效率最高。目前,應用準移動閉塞的高鐵列車設計最小運行時間間隔為3 min。可見,現有列車控制方法中列車的最小運行間距仍然較大,區間通過能力仍有待進一步提升。
2.2 基于虛擬耦合的列車群運行控制技術
根據 “虛擬耦合”的概念,論文基于群體智能技術刻畫虛擬耦合列車群運行控制技術的核心概念。通過虛擬耦合組成的列車群被視為一個多智能體系統,各列車作為獨立個體能夠實現精確定位、測速測距從而感知列車運行環境,能夠計算自身的速度曲線,保障列車安全行駛,并能夠基于無線與其他列車進行通信,建立并保持列車線性編隊運行狀態,并且不能發生碰撞,從而實現協調控制。
2.2.1 虛擬耦合列車群內涵
基于虛擬耦合的列車群運行如圖2 所示。在虛擬耦合列車群中,一個列車群共由N 列列車組成, vi代表列車群中第i 列車運行速度,xi代表第i 列車的位置, xi-xi-1可用于表示第i 列車與第i-1 列車的實際間距, D(vi,vi-1)表示第i 列車與第i-1 列車的理想間距。虛擬耦合列車群中的領航列車,其車頭位置、車輛速度、車輛實際加速度分別為x1、v1、

圖2 基于虛擬耦合的列車群運行圖示Fig.2 Train formation operation based on virtual coupling
虛擬耦合列車群:設采用虛擬耦合模式構建緊密聯系的n列車,所構成的集合為G={i|i=1,2…,n},在一定的時間和空間范圍內,集合G 中任意列車i 的屬性向量為Ai=(ai,1,…,ai,k,…,ai,m), ai,k可表示所在線路、列車運行方向、目的車站等屬性,若對于集合G 中的任意兩列車i 和j,都滿足Ai=Aj,稱G 為虛擬耦合列車群。
領航列車:在虛擬耦合列車群G={i|i=1,2…,n}中,設列車i 的緊前列車集合為Fi,若Fi= ? 成立,則列車i 為該虛擬耦合列車群中的領航列車(又稱領航者)。
緊前列車:在虛擬耦合列車群G={i|i=1,2…,n}中,若對于G 中的任意兩列車i 和j,以列車群運行方向為正方向,二者位置分別為xi和xj,若xj>xi且不存在滿足xj>xk>xi的第三列車k,則列車j為i 的緊前列車。
控制列車:在虛擬耦合列車群G={i|i=1,2…,n}中,設列車i 的緊前列車集合為Fi,若Fi≠? 成立,則列車i 為該虛擬耦合列車群中的控制列車。可見,虛擬耦合列車群所組成的隊列中,一般只存在一列領航列車,其他都為控制列車。
2.2.2 虛擬耦合列車群運行協同控制方法
基于虛擬耦合列車群運行控制方法旨在通過控制列車群中的每列車緊隨其緊前列車運行的方式,實現列車群的穩定協同運行,最終達到列車群安全高效運行的目的。保持列車群穩定協同狀態是虛擬耦合列車群運行控制的核心,列車群穩定協同狀態是以保證列車群安全運行為提前,提高運行控制效率為目標。通過虛擬耦合列車群運行控制在列車機械性能、運行環境等允許的前提下,最終實現列車群內任意兩列車相對速度一致,相鄰兩列車間的距離為理想間距。兩車相對速度一致時列車保持相對靜止,在保障安全的同時可以一定程度縮小列車間距,兩車之間保持理想間距運行時,能夠保證列車的高效運行且不會發生碰撞等安全問題。
列車在區間運行過程中會存在運行條件發生改變的情況,例如進站、出站、區段限速等,列車群的運行狀態也會隨之調整,原來穩定協同運行狀態會遭到破壞,虛擬耦合列車群將進入不穩定狀態中。所以在列車群運行過程中,需要通過不斷調整列車群的運行狀態來適應列車群運行狀態的改變,以此實現列車群在區間盡快達到或恢復穩定協同運行的狀態,從而使虛擬耦合列車群實現安全高效的運行效果。虛擬耦合列車群運行控制的主要流程,如圖3 所示。
3 基于虛擬耦合的列車群體智能控制技術
3.1 基于MAS的虛擬耦合列車群控制規則
根據MAS 模型,虛擬耦合列車群中的每列車的運行控制單元可看作一個Agent,整個虛擬耦合列車群的運行控制則構成了一個MAS 控制系統。虛擬耦合列車群運行控制過程中,為了實現列車群穩定協同運行,每個列車Agent 進行運算和處理主要涉及的關鍵環節包括列車狀態獲取、列車群狀態判斷、列車追蹤策略制定和列車群實時動態調控。
1)列車狀態獲取
列車狀態獲取是虛擬耦合列車群控制的初始環節。控制列車i 的列車Agent 主要通過列車感知,獲取緊前列車i-1 的加速度、控制列車i 與緊前列車 i-1 的速度差和間隔距離,判斷列車i 和i-1 的運行狀態。
列車i 和列車i-1 相對運行狀態根據二者的間距和速差確定,間距關系分別有列車i 與i-1 的間距大于、等于、小于理想間距3 種情況,速差同樣有控制列車i 的運行速度大于、等于、小于緊前列車i-1的速度,二者相對關系兩兩組合,共構成9 種運行狀態,如表1 所示。

表 1 列車群中列車狀態定義Tab.1 Definition of train state in train formation
2)列車群狀態判斷
獲取列車狀態之后,需要對整個列車群的運行狀態進行判斷。主要根據列車群中任意兩相鄰列車的相對速度和間隔距離判斷整個列車群的運行狀態。當列車群中任意兩相鄰列車速度一致,且列車間隔距離為理想間距,則可認為列車群已經達到理想穩定的運行狀態,流程結束。否則,認為列車群未達到理想的協同運行狀態,則進入下一步,做出調整策略。
3)列車加速度追蹤策略制定及動態調控
針對相鄰兩列車由于速度差和間隔距離的變化導致的9 種不同運行狀態的情況,控制列車i 的列車Agent 制定相對于緊前列車i-1 的追蹤運行策略,追蹤策略體現為對列車i 的加速度進行調整。列車i 加速度的變化會帶來列車i 速度的變化,控制列車i 的列車Agent 通過計算獲得列車i 的控制加速度,據此調整列車i 加速度,使列車i 與列車i-1 的速度越來越相近、間距越來越接近理想間距。當任意兩列車的速度趨于一致,間距達到理想狀態時,則認為虛擬耦合列車群達到了穩定協同的運行狀態。
控制列車追蹤運行策略的實施,將使得列車的運行狀態發生轉變。如圖4 所示,展示列車的9 種運行狀態將隨著追蹤策略的變化發生轉移,最終通過多個過程狀態的變化和調整使得列車群中任意的控制列車最終達到理想狀態,從而使得列車群達到穩定狀態的情況。

圖4 基于虛擬耦合的控制列車9種狀態轉移Fig.4 Nine state transitions for control train based on virtual coupling
3.2 基于MAS的虛擬耦合列車群協同控制模型
根據上述虛擬耦合列車群的控制規則,以實現虛擬耦合列車群系統的穩定協同運行為目標,構建基于MAS 的虛擬耦合列車群協同控制模型[17]。協同控制最終要達到的目標有兩個:1)列車群中任意一列車(除領航列車之外)與其緊前列車之間運行距離趨于某一個固定的值(理想間距);2)列車群中各列車速度相同,即任意兩列車的相對速度為0。可分別用公式(1)和公式(2)表示。

基于MAS 的協同控制約束主要包括:1)列車的控制輸入不能超出列車機械特性限制,可借助列車加速度刻畫;2)列車之間的距離小于某一閾值時,應采取制動緊急制動,防止列車之間的距離過小所帶來的安全隱患。可分別表示為公式(3)、(4),公式中aacc_max、aabreak_max分別表示列車最大驅動加速度和制動加速度。

根據控制列車i 與其緊前列車i-1 的速度差和間隔距離的關系構建控制列車的多智能體控制方程,進而判斷列車所處的狀態。此時,控制列車i 與緊前列車i-1 的加速度差Δai可表示為公式(5)。

獲得控制列車之間的加速度差后,列車根據列車i-1 的加速度,對列車i 的加速度進行調整,進而改變列車的運行狀態,加速度的調整與列車運行9種狀態的追蹤對應,列車i 的控制加速度可用公式(6)表示。

虛擬耦合列車群多智能體協同控制問題是多智能體編隊問題,最終體現在系統的一致性上。多智能體一致性,指在多智能體系統中,各獨立單元協同合作,在時間維度上最終達到群體一致的狀態。基于MAS 的虛擬耦合列車群協同控制方法可通過構造Lyapunov 函數證明了控制模型的漸進穩定性。
4 基于虛擬耦合的列車群體控制的系統框架及場景驗證
4.1 基于虛擬耦合的列車群體控制及調度系統框架
虛擬耦合列車群在運行控制及調度組織方面均具備突出的優勢,基于MAS 的虛擬耦合列車群控制方法設計了一種基于多智能體的兩層架構的調度及控制系統。打破了傳統的中心調度層、車站控制層和車載控制層三層架構的調度及控制系統。
如圖5 所示,新提出的調度與控制系統架構將現有的復雜架構簡化為兩層,包含調度組織層和執行控制層。調度組織層包括調度組織Agent,主要負責發布行車調度指令、進行列車群運行狀態監控和列車路徑規劃。在執行控制層,每列列車為一個列車Agent,多個具有相關關系的列車Agent 組成列車群,列車Agent 主要完成虛擬耦合列車群編隊生成、狀態保持與解耦,列車群間追蹤運行控制。在列車群運行過程中,需要借助地面基礎信號設備輔助,在執行控制層加入地面設備Agent。地面設備Agent 主要負責列車與地面設備的聯鎖安全,通過列車Agent 和地面設備Agent 的協同控制使列車群能夠適應復雜線路條件的安全高效運行。
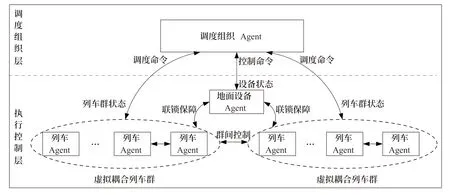
圖5 虛擬耦合列車群體控制及調度系統框架示意圖Fig.5 Schematic diagram of train formation control and dispatching system based on virtual coupling
基于虛擬耦合的列車控制及調度的兩層架構中,各Agent 之間均可以直接通信,高效的通信方式是系統可靠運轉的基礎。
4.2 場景驗證
基于上述系統框架、采用仿真手段對基于MAS的列車協同控制模型的有效性進行驗證分析。在仿真場景中,考慮通信信號傳輸、列車計算處理以及列車加速形成過程的綜合延時為400 ms,安全系數取值1.2。仿真實例選取一個由5 列列車構成的列車群,如圖6 所示。在假定平坡線路條件下,5 輛列車以不同的運行間距和速度順序行駛,領航列車初始運行速度300 km/h,并保持勻速。虛擬耦合列車群中,各列車的初始速度范圍為293 ~302 km/h,相鄰列車初始間距在2 031 ~2 077 m 之間。

圖6 基礎仿真案例設定Fig.6 Setting for basic simulation cases
在保證初始狀態相同的條件下,分別采用基于虛擬耦合和基于準移動閉塞等其他控制方式進行仿真實驗,分析了不同場景下列車凈距的變化趨勢,如圖7 所示。考慮一個閉塞分區的定位余量,基于準移動閉塞的5 列車的間距為11 106 m,基于位置的移動閉塞列車間距為8 871 m,基于速度的移動閉塞列車間距為813 m,基于虛擬耦合的列車群速度保持在300 km/h,列車之間的凈間距最終穩定在723 m。可見,基于MAS 的列車協同控制方法明顯縮減列車追蹤間隔、提高列車運行效率。

圖7 不同列車控制方式下列車凈距隨仿真時間變化Fig.7 Clear distance of the train is changed along with simulation time under different train control method
5 基于群體智能的列車控制技術的優勢及展望
基于群體智能的列車運行控制技術既有明顯的優勢,但距離產業應用尚有很長的距離,需在深化復雜環境的基礎理論研究、強化系統安全設計技術、加快系統設計及產業化技術研究等方面開展工作。隨著車聯網和群體智能等新一代信息技術的快速發展,列車運行控制技術發展將面臨著由列車空間間隔控制法向列車群體協同控制發展的機遇,列車運行控制系統結構也將面臨由地面集中控制系統架構向人機物融合的分布式群體智能系統架構發展演變。
5.1 基于群體智能的列車控制技術的優勢
1)基于群體智能的列車控制技術能夠大幅提升線路運輸能力
根據上述研究,基于虛擬耦合的列車群協同控制方法相較于傳統基于閉塞的控制方法最顯著的差別就體現在突破傳統閉塞理念,縮小列車運行追蹤間隔,較既有閉塞模式運行效率明顯提升。而基于群體控制的列車控制技術,一個車次可由列車群組成,在不改變軌道、線路等既有設施的條件下可大幅提升運輸能力,尤其適用于目前運輸能力已經飽和、靠現有技術難以繼續提高的繁忙線路。
2)基于群體智能的列車控制技術能夠更加適應客流時空分布不均衡的特征
既有的控制模式下,高速鐵路列車主要分為長編組和短編組兩種,且列車大多以成對的形式開行,其對客流時空分布不均衡的適應性較差,經常出現部分區段座席緊張而部分區段有較高的座位虛糜的現象。基于群體智能的列車控制技術可根據實際客流需求靈活改變列車群的組成,更加契合客流的時空分布特性。
3)基于群體智能的列車控制技術能夠有效簡化系統層次,提升系統可靠性
我國鐵路運輸在長期的生產實踐中形成了由中心調度、車站控制和車載控制構成的3 層復雜系統架構。而基于群體智能的列車控制技術可有效簡化系統層次,能夠充分適應和發揮虛擬耦合列車群體協作優勢,簡化系統架構,提升系統可靠性。
5.2 基于群體智能的列車運行控制技術研究及發展
1)深化復雜環境下的基礎理論研究
提升復雜和異常環境下虛擬耦合列車群控制的魯棒性。考慮列車群進出站解耦和耦合等復雜運行環境,研究通信異常及各種故障異常情況下的運行控制技術,實現高速鐵路列車群的高效智能控制,提高基于人工智能技術的高鐵列車控制系統的抗干擾性。
多智能體的高速鐵路列車群的線性編隊運行研究。基于群體智能的控制技術建立并保持列車線性編隊運行狀態是研究的難點之一,解決列車群隊形生成、隊形保持、隊形切換、編隊避障、自適應等是研究的主要方向之一。
基于群體智能列車控制的高效通信機制構建。為了提高列車群的高效控制,需分析群體智能控制技術下列車間通信的關鍵點,構建高效的列車間通信機制降低通信延時,提高列車群控制的可靠性。
2) 強化安全設計及應用技術研究
展開列車群體智能控制的安全分析。深入分析各種復雜場景下列車群運行的安全性,提出適應群體智能技術風險庫的構建方法,并構建風險識別、分析、評價體系。
實現列車運行狀態的精準化感知。依托多模定位技術實現列車可信定位,提高測速測距設施設備的靈敏度,提高列車智能感知范圍,精準把握列車運行狀態。
3)加快系統設計及產業化技術研究
基于人機物融合的分布式智能系統架構理念,分析傳統調度及控制系統特征與適應性,刻畫基于群體智能列車控制系統的特性,實現列車控制系統的精簡與重構。研究基于高速移動通信的高鐵車聯網技術構建,為列車群體智能控制技術提供技術保障,加快群體智能列車控制技術的實際應用。
形成“計劃―調度―控制”三位一體的全新生態體系。進一步實現列車控制與運輸需求特征的匹配,充分發揮虛擬耦合列車群模式對軌道交通系統動態客流的適應性,綜合推動整個軌道交通系統的運輸效能提升。
6 結論
詳細分析基于閉塞的鐵路列車運行控制方式特征,以車聯網和群體智能等新一代信息技術的發展為前提,提出基于虛擬耦合的列車群運行控制技術,闡析并刻畫該技術的內涵及群體控制方法。以此為基礎,進一步形成“列車狀態獲取―列車群狀態判斷―列車加速度追蹤策略制定及動態調控”三階段的列車群控制規則,根據該規則提出基于MAS 的虛擬耦合列車群系統控制模型。接著,優化設計了基于MAS 的虛擬耦合列車群控制方法的“調度組織―執行控制”的雙層結構系統,打破了傳統的中心調度層、車站控制層和車載控制層3 層架構的調度及控制系統,并基于該設計采用仿真技術驗證了方法的有效性。
在基于虛擬耦合的列車群智能控制技術研究的基礎上,發現該技術在提升列車運行效率、緩解線路運輸能力緊張、適應客流時空分布不均衡、有效簡化系統層次等方面均有突出的優勢。在未來的研究中,需進一步深化復雜環境基礎理論研究、強化安全設計技術、加快系統設計和應用技術研究。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
上海大中型電機(2017年4期)2017-02-06 05:27:06
照明工程學報(2016年3期)2016-06-01 12:17:56