基于ANSYS 的高速動車組制動控制裝置翻轉臺有限元分析和優化設計
2020-03-08 09:49:22江濤
機電產品開發與創新 2020年1期
江 濤
(南京中車浦鎮海泰制動設備有限公司, 江蘇 南京 211800)
0 引言
現有翻轉臺為固定式翻轉臺, 在固定式翻轉臺上進行整個制動控制裝置(大風缸、氣路板、側護箱、下護箱等)的組裝。 當制動控制裝置組裝完成后,會在制動控制裝置自動實驗裝置上對整個制動控制裝置進行試驗,完成后將其存放到制動控制裝置成品區。 但是從固定式翻轉臺組裝到制動控制裝置成品區的過程比較復雜, 整個過程比較費人費時,很多地方工序重復,不符合精益生產的理念。 因此,優化設計移動翻轉臺。 本文主要基于ANSYS 有限元分析方法, 以鐵路相關行業標準為判定依據,對翻轉臺強度進行仿真分析,并優化設計了移動翻轉臺。
1 翻轉臺的結構設計
根據已有移動翻轉臺的結構, 在對其進行改造設計后如圖1 所示,主要將其分為底座和翻轉機構兩部分,底座,見圖2,主要由左支架、右支架,底橫梁、腳輪、軸承座、萬向輪和驅動輪組成,翻轉機構,見圖3,主要由左拉桿、右拉桿、上橫梁和吊桿組成。 其中左支架和右支架,見圖4,由左梁、右梁、頂梁和底梁組成。

圖1 移動翻轉臺Fig.1 Moving roll-over table

圖2 底座Fig.2 Pedestal
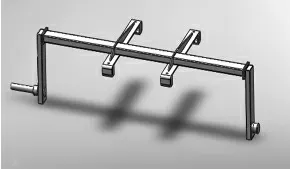
圖3 翻轉機構Fig.3 Dumping gear

圖4 左支架和右支架Fig.4 Left and right stents
1.1 零件材料及連接
左梁和右梁,頂梁和底梁采用矩形型鋼;底橫梁采用方形型鋼;左拉桿、右拉桿和頂橫梁采用矩形型鋼;各型鋼材料采用Q235B 碳素結構鋼;底座和翻轉機構采用軸承; 左右支架各零件之間和兩個吊桿和上橫梁主要采用焊接連接,左右支架和底橫梁、左右拉桿和上橫梁、腳輪萬向輪和左右支架連接采用螺栓連接。
1.2 零件尺寸及技術要求
根據實際使用翻轉臺的經驗、 制動控制裝置組裝要求及使用方便、 結構安全穩定及使用輕便等要求,確定移動翻轉臺各個零件的尺寸和技術要求。圖5 為吊裝制動控制裝置的移動翻轉臺,制動制動裝置通過螺栓與翻轉機構的吊桿相連。
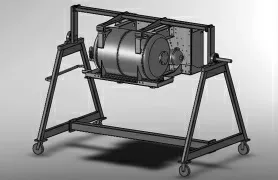
圖5 吊裝制動控制裝置的移動翻轉臺Fig.5 Moving roll-over table wit lifting btake control device
2 載荷強度分析
為保證其使用安全,需對移動翻轉臺強度進行校核,使用ANSYS 有限元分析軟件對其進行強度分析。 選擇制動控制裝置在翻轉臺上出現應力和變形最大的位置點(以翻轉機構吊著制動控制裝置轉動位置為準,垂直于水平面±90°、平行于水平面±0°),直接在吊桿上施加制動控制裝置的重量,焊接件和螺栓連接之間采用Bonded 綁定接觸模擬,腳輪和萬向輪固定不動進行分析,其應力和變形結果如圖6~13 所示。 從圖中可以看出,以上四種情況下的應力和變形在安全值范圍以內, 說明設計符合翻轉臺載荷強度的要求。

圖6 變形圖(翻轉機構垂直于水平面90°)Fig.6 Deformation diagram(perpendicular to horizontal plane 90°)

圖7 應力圖(垂直于水平面90°)Fig.7 Stress diagram(perpendicular to horizontal plane 90°)
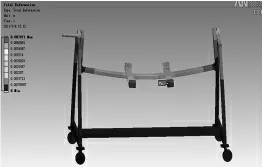
圖8 變形圖(垂直于水平面-90°)Fig.8 Deformation diagram(perpendicular to horizontal plane -90°)
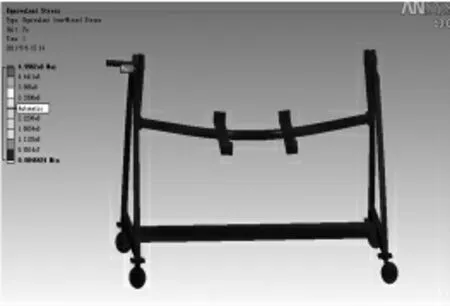
圖9 應力圖(垂直于水平面-90°)Fig.9 Stress diagram(perpendicular to horizontal plane -90°)

圖10 變形圖(垂直于水平面0°)Fig.10 Deformation diagram(perpendicular to horizontal plane 0°)

圖11 應力圖(垂直于水平面0°)Fig.11 Stress diagram(perpendicular to horizontal plane 0°)

圖12 變形圖(垂直于水平面-0°)Fig.12 Deformation diagram(perpendicular to horizontal plane-0°)

圖13 應力圖(垂直于水平面-0°)Fig.13 Stress diagram(perpendicular to horizontal plane-0)
3 翻轉機構轉動設計
通過現場測試現有翻轉臺,可知翻轉裝置的轉速,其滿足制動控制裝置的裝配要求, 因此新設計移動翻轉臺的翻轉裝置,見圖14,轉速也設定為相同轉速;通過電動機帶動移動翻轉臺的翻轉裝置轉動,由無級變速器和蝸輪蝸桿減速器減速實現移動翻轉臺的轉速。

圖14 翻轉機構轉動電機安裝圖Fig.14 Dumping gear rotating motor installation diagram
控制電路設計:控制電路的電壓為220V,根據移動翻轉臺工作的特點,電機的轉動只需要正反轉點動,所以控制電路設計如圖16 所示。 由圖16 轉動電機控制原理圖所示,合上總開關S,整個電路得電, 按下按鈕SB1,交流接觸器KM1 線圈得電,主觸點閉合,電機正轉,常閉觸點斷開,反轉電路失電,防止電路短路;按下按鈕SB2, 交流接觸器KM2線圈得電,主觸點閉合,電機反轉,常閉觸點斷開,正轉電路失電。

圖15 電動機、無級變速器和蝸桿渦輪減速器Fig.15 The motor,non-polar transmission and worm gear reducer

圖16 轉動電機控制原理圖Fig.16 Control schematic diagram of rotating motor
4 翻轉臺移動設計
由圖17 移動翻轉臺設計圖所示, 移動翻轉臺移動設計采用電動驅動輪帶動翻轉臺移動,驅動輪安裝在左支架前面的彎板下,彎板焊接在左支架的底梁上,拉動移動翻轉臺移動,在右支架安裝萬向腳輪通過扶手認為控制移動翻轉臺的方向, 電動驅動輪由控制器和加速手柄控制。 最終使用狀態示意圖如圖18 所示。

圖17 移動翻轉臺設計圖Fig.17 The design of moving roll-over table

圖18 移動翻轉臺最終狀態Fig.18 Final state of moving roll-over table
5 結論
經過對高速動車組制動控制裝置翻轉臺進行有限元分析,其結構滿足安全要求;并優化設計為移動翻轉臺,設計可行,穩定性好,節省了很多人力和時間,提高了制動控制裝置生產效率。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
中華詩詞(2020年1期)2020-09-21 09:24:52
模具制造(2019年3期)2019-06-06 02:10:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
航天器工程(2014年5期)2014-03-11 16:35:55