車間智能服務(wù)機(jī)器人
2020-03-12 07:43:14李兆亮
科技與創(chuàng)新 2020年3期
李兆亮
(武漢理工大學(xué) 機(jī)電工程學(xué)院,湖北 武漢430070)
隨著現(xiàn)代科學(xué)技術(shù)的飛速發(fā)展,機(jī)器人已越來越多地進(jìn)入人們的生活領(lǐng)域,機(jī)器人代替人類從事各種單調(diào)、重復(fù)、繁重、危險(xiǎn)以及有毒害的工作是社會(huì)發(fā)展的一個(gè)趨勢[1]。現(xiàn)代機(jī)器人一般為兩類:工業(yè)機(jī)器人,主要指裝配、搬運(yùn)、焊接、噴漆等機(jī)器人;極限作業(yè)機(jī)器人,指在人難以到達(dá)的惡劣環(huán)境下代替人工作的機(jī)器人。在設(shè)備高智能化和社會(huì)人性化的今天,用機(jī)器代替人完成危險(xiǎn)作業(yè),機(jī)器的集成化、人性化成為未來發(fā)展的方向。目前,各種工業(yè)機(jī)器人在工廠生產(chǎn)線中的應(yīng)用越來越廣泛,如焊接機(jī)器人、裝配機(jī)器人和噴涂機(jī)器人等,這些機(jī)器人大大提高了生產(chǎn)效率和生產(chǎn)精度,但它們只是在固定生產(chǎn)線中重復(fù)進(jìn)行某些操作,不能滿足車間人員其他方面的需求[2]。比如,車間工程師在工廠維修維護(hù)設(shè)備時(shí),往往需要背負(fù)沉重的工具包、潤滑油等材料,這成為工程師的一個(gè)負(fù)擔(dān);有些車間存在潛在的危險(xiǎn),車間人員不能及時(shí)察覺;機(jī)器設(shè)備出現(xiàn)故障時(shí),工程師很難進(jìn)狹小的地方查看具體情況。工廠車間需要一種智能服務(wù)機(jī)器人,協(xié)助車間人員完成設(shè)備維護(hù)、車間巡視,檢測工廠環(huán)境,間接保護(hù)人身安全的服務(wù)機(jī)器人,因此,設(shè)計(jì)了一種車間服務(wù)機(jī)器人。
1 系統(tǒng)功能分析
本次設(shè)計(jì)的車間智能服務(wù)機(jī)器人兼?zhèn)鋬煞N功能,自動(dòng)跟在工人身后作為工人搬運(yùn)工作的必要用具,又可以在惡劣環(huán)境下,進(jìn)入有限制且人不方便進(jìn)入的場所進(jìn)行作業(yè),為工人傳回實(shí)時(shí)圖像。尤其是當(dāng)危險(xiǎn)發(fā)生時(shí),如爆炸之類事情發(fā)生時(shí),在搶險(xiǎn)之前檢測作業(yè)區(qū)的溫度、濕度、甲烷濃度等氣體,并且回傳現(xiàn)場圖像,減少救險(xiǎn)人員的傷亡[3]。
車間智能服務(wù)機(jī)器人是一種基于單片機(jī)設(shè)計(jì)[4]的智能全自動(dòng)小車,主要應(yīng)用于各種工廠車間,例如裝配車間、維修車間等。其主體包括小車底盤、尋跡跟蹤模塊、車載高清攝像頭、超聲波模塊、多種傳感器(溫度傳感器、甲烷等可燃危險(xiǎn)氣體傳感器、酒精傳感器)和控制系統(tǒng)(單片機(jī)、舵機(jī)控制板、藍(lán)牙模塊等)。車間智能服務(wù)機(jī)器人總體系統(tǒng)功能如圖1 所示。
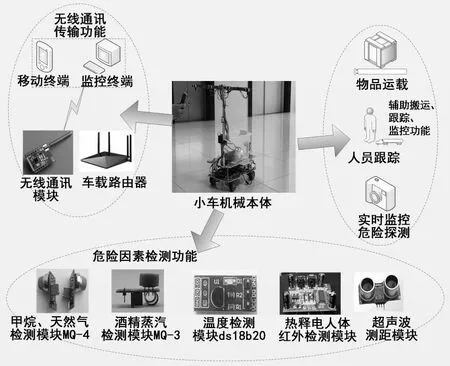
圖1 機(jī)器人系統(tǒng)功能圖
如圖1 所示,傳感器將外部信息采集并輸入到處理器,處理器計(jì)算并發(fā)出控制信號,通過舵機(jī)、驅(qū)動(dòng)輪和報(bào)警器等做出外部控制。車間智能服務(wù)機(jī)器人主要有以下4 個(gè)功能。
1.1 載物跟蹤人行駛
有紅外探測、超聲波模塊、無線電模塊3 種方法可保證機(jī)器人跟著人行駛。基于這種功能,在機(jī)器人上裝載著很多工廠維修或者完成其他任務(wù)時(shí)的必需品,以減少工人的體力勞動(dòng)。
1.2 檢測報(bào)警功能
機(jī)器人在運(yùn)行過程中會(huì)時(shí)刻采集所處環(huán)境的信息,當(dāng)有某個(gè)危害參數(shù)超標(biāo)時(shí),會(huì)做出報(bào)警反應(yīng),并把信息傳輸給終端和手持裝置。
1.3 工作現(xiàn)場檢測判斷
機(jī)器人可代替人進(jìn)入不宜人進(jìn)入的工作場所,完成初期檢測工作。車上裝有Wi-Fi 傳輸模塊和高清攝像頭,通過手機(jī)軟件可以操縱小車行走,并將工作現(xiàn)場的實(shí)時(shí)圖像傳給工人,方便工人判斷現(xiàn)場情況。
1.4 高危工作場所檢測
當(dāng)車間發(fā)生危險(xiǎn)事故時(shí),救援人員先遙控本機(jī)器人進(jìn)入事故發(fā)生地檢測當(dāng)時(shí)環(huán)境,并將現(xiàn)場視頻和環(huán)境信息傳輸給救援人員。車間智能服務(wù)機(jī)器人上安裝有溫度傳感器,檢測甲烷、丙烷等可燃性危險(xiǎn)氣體的傳感器,酒精傳感器外加部分危險(xiǎn)氣體傳感器。當(dāng)現(xiàn)場氣體或溫度指標(biāo)超過人體能夠承受的范圍時(shí),車載蜂鳴器會(huì)發(fā)出警報(bào),讓救援人員在進(jìn)入工作場所前有所準(zhǔn)備。高危工作場所檢測如圖2 所示。
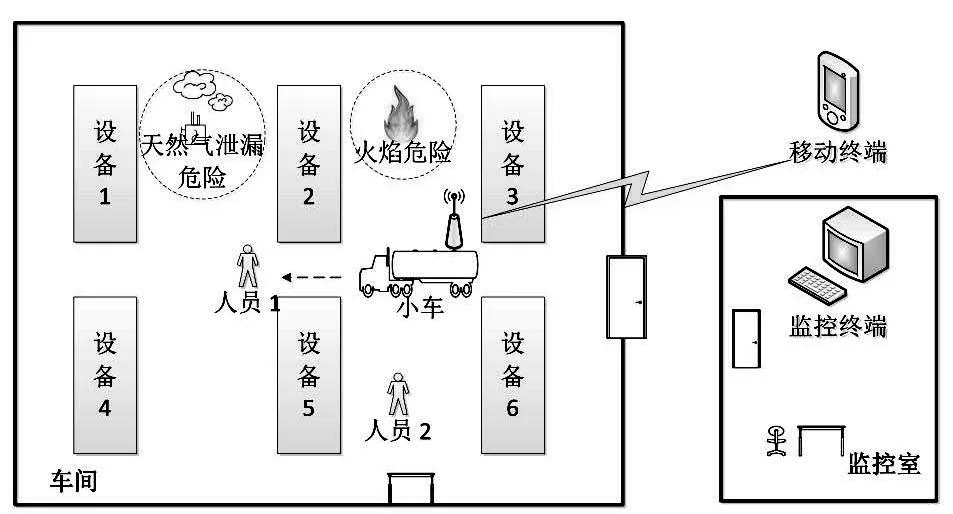
圖2 高危工作場所檢測示意圖
2 機(jī)器人硬件部分
為了完成上述功能,設(shè)計(jì)車間智能服務(wù)機(jī)器人硬件主要包括主構(gòu)件單元、行進(jìn)單元、監(jiān)測單元、控制單元和手持單元。為了更好地在狹小空間內(nèi)作業(yè),將尋人傳感器的架子設(shè)計(jì)為折疊方式,尋人時(shí)架子打開,不尋人時(shí)將架子折疊在車頂。為了能夠?qū)崿F(xiàn)360°無死角視頻監(jiān)測,設(shè)計(jì)了1 個(gè)兩維運(yùn)動(dòng)的云臺,配合機(jī)器人本身的運(yùn)動(dòng),可實(shí)現(xiàn)無死角監(jiān)控。為了更好地在工廠這種復(fù)雜環(huán)境中運(yùn)行,設(shè)計(jì)4 個(gè)輪全部具有驅(qū)動(dòng)能力,能有效地提高其通過率,其機(jī)械結(jié)構(gòu)如圖3 所示。
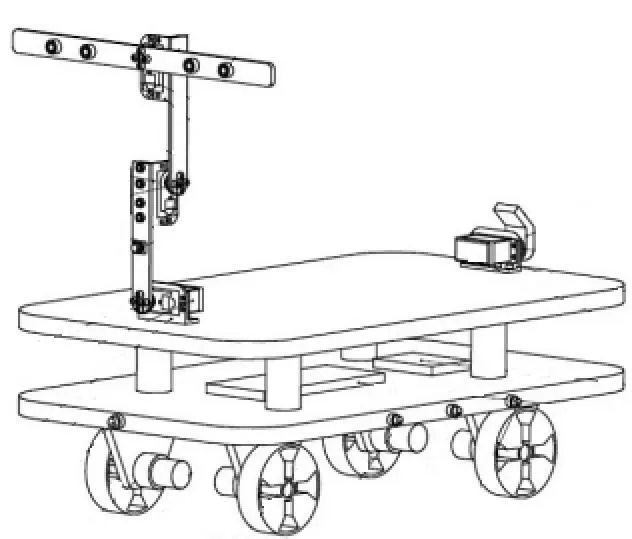
圖3 機(jī)械結(jié)構(gòu)簡圖
主構(gòu)件單元由機(jī)身、豎直下擺臂、豎直上擺臂、水平擺臂和4 個(gè)舵機(jī)構(gòu)成。豎直下擺臂下端通過舵機(jī)固定安裝在機(jī)身上,豎直上擺臂下端通過舵機(jī)固定安裝在豎直上擺臂上端,水平擺臂中間位置通過舵機(jī)與豎直上擺臂上端固連,機(jī)身后端中間位置固定安裝1 個(gè)舵機(jī)。
行進(jìn)單元由4 個(gè)直流電機(jī)、4 個(gè)減速器、4 個(gè)驅(qū)動(dòng)輪、1個(gè)直流電機(jī)驅(qū)動(dòng)器構(gòu)成。4 個(gè)驅(qū)動(dòng)輪分別獨(dú)立安裝在車間機(jī)器人機(jī)身底部的前左方、前右方、后左方和后右方,每個(gè)驅(qū)動(dòng)輪分別與1 個(gè)減速器相連,每個(gè)減速器還分別與1 個(gè)直流電機(jī)連接,4 個(gè)直流電機(jī)都連接在直流電機(jī)驅(qū)動(dòng)器上。
監(jiān)測單元主要包括用于拍攝車間視頻的攝像頭、監(jiān)測人體位置的熱釋電人體紅外傳感器、監(jiān)測距離的超聲波傳感器、監(jiān)測煙霧和火災(zāi)的火焰?zhèn)鞲衅鳌⒈O(jiān)測車間環(huán)境溫度的溫度傳感器、監(jiān)測車間易燃?xì)怏w的可燃?xì)怏w傳感器。
控制單元主要包括微處理器、晶振及復(fù)位電路、存儲模塊、Wi-Fi 無線傳輸模塊、舵機(jī)控制模塊、圖像處理模塊、數(shù)據(jù)采集模塊、報(bào)警器、供電電池。
手持單元包括1 個(gè)智能手機(jī)和手機(jī)端APP 軟件。通過控制單元中的Wi-Fi 無線傳輸模塊,將控制單元與手持單元建立無線通訊,傳輸控制信號和數(shù)據(jù)信息。
3 機(jī)器人電氣控制部分
機(jī)器人電氣控制部分[5],主要包括微處理器、晶振及復(fù)位電路、存儲模塊、Wi-Fi 無線傳輸模塊、圖像處理模塊、無線電模塊、舵機(jī)控制模塊、數(shù)據(jù)采集模塊、報(bào)警器、供電電池等。其中,微處理器、晶振及復(fù)位電路、存儲模塊集成在一個(gè)電路板上。圖像處理模塊連接攝像頭,數(shù)據(jù)采集模塊連接熱釋電人體紅外傳感器、超聲波傳感器、火焰?zhèn)鞲衅鳌囟葌鞲衅鳌⒖扇細(xì)怏w傳感器。所有舵機(jī)都與舵機(jī)控制模塊相連,電路板、舵機(jī)控制模塊、Wi-Fi 無線傳輸模塊、圖像處理模塊、數(shù)據(jù)采集模塊和供電電池均安裝在機(jī)身內(nèi)部。供電電池為可充電電池,為電路板供電。微處理器與直流電機(jī)驅(qū)動(dòng)器通訊,控制行進(jìn)單元的行進(jìn)和轉(zhuǎn)向。微處理器與數(shù)據(jù)采集模塊和圖像處理模塊通訊,采集傳感器數(shù)據(jù)或視頻數(shù)據(jù),并保存在存儲裝置中。報(bào)警器安裝在機(jī)身的側(cè)面,并與微處理器相連,當(dāng)微處理器采集的溫度數(shù)據(jù)超過設(shè)定閾值或采集到車間中有可燃?xì)怏w或火焰,將與報(bào)警器通訊,發(fā)出報(bào)警聲音。微處理器與Wi-Fi 無線傳輸模塊通訊,接收或發(fā)送各種無線控制信號。微處理器能夠與舵機(jī)控制模塊進(jìn)行通訊,控制所有舵機(jī)的順時(shí)針或逆時(shí)針旋轉(zhuǎn),舵機(jī)Ⅰ、Ⅱ、Ⅲ的旋轉(zhuǎn)角度均為90°,舵機(jī)Ⅳ可以在0°~60°范圍內(nèi)任意旋轉(zhuǎn)。舵機(jī)Ⅰ旋轉(zhuǎn)后,豎直下擺臂可轉(zhuǎn)到水平位置;舵機(jī)Ⅱ旋轉(zhuǎn)后,豎直上擺臂可轉(zhuǎn)到水平位置;舵機(jī)Ⅲ旋轉(zhuǎn)后,水平擺臂可轉(zhuǎn)到豎直位置。當(dāng)車間智能服務(wù)機(jī)器人需要到車間內(nèi)的狹小空間進(jìn)行探測和巡視時(shí),舵機(jī)Ⅰ、Ⅱ和Ⅲ將旋轉(zhuǎn)90°。舵機(jī)Ⅰ、Ⅱ和Ⅲ旋轉(zhuǎn)后,豎直下擺臂、豎直上擺臂和水平擺臂可以折疊,水平疊放在機(jī)身上面。舵機(jī)Ⅳ旋轉(zhuǎn)時(shí),攝像頭隨其旋轉(zhuǎn),增大拍攝范圍。安裝在手機(jī)上的APP 軟件能實(shí)現(xiàn)車間服務(wù)機(jī)器人的方向控制,也能顯示機(jī)器人所采集的視頻、傳感器參數(shù)等信息。通過控制單元中的Wi-Fi 無線傳輸模塊,控制單元和手持單元建立無線通訊,傳輸控制信號和數(shù)據(jù)信息。具體控制系統(tǒng)結(jié)構(gòu)如圖4 所示。
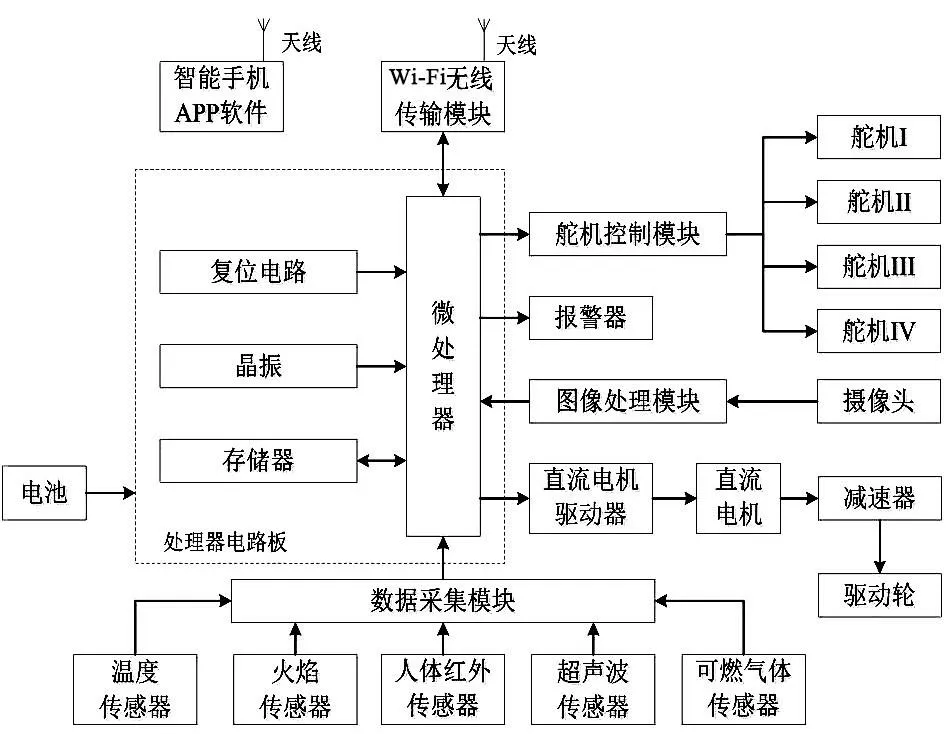
圖4 控制系統(tǒng)結(jié)構(gòu)圖
控制部分采用單片機(jī)作為控制芯片[6],設(shè)計(jì)中采用了4片單片機(jī),1 片作為主機(jī),其他3 片作為從機(jī)。每個(gè)單片機(jī)有自己的控制部分,相互之間協(xié)調(diào)工作,兼容性較好。單片機(jī)電器原理如圖5 所示。
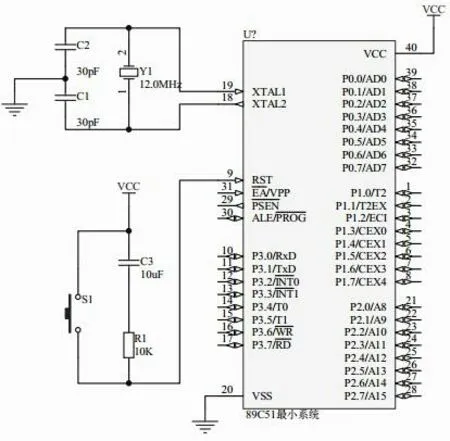
圖5 單片機(jī)電氣原理圖
驅(qū)動(dòng)裝置動(dòng)力源采用的是直流減速電機(jī),通過驅(qū)動(dòng)模塊來驅(qū)動(dòng)電機(jī)動(dòng)作,本設(shè)計(jì)選用的驅(qū)動(dòng)模塊型號為L298N,單片機(jī)傳給驅(qū)動(dòng)模塊控制信號,控制電機(jī)的運(yùn)轉(zhuǎn)方向及速度,通過光電編碼器反饋轉(zhuǎn)角信息。L298N 驅(qū)動(dòng)模塊的電氣原理如圖6 所示。
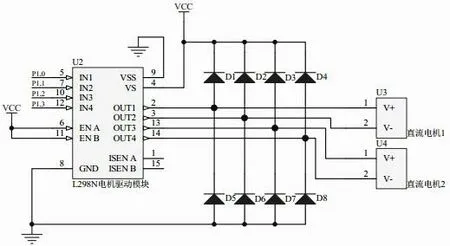
圖6 L298N 電器原理圖
手機(jī)通過Wi-Fi 網(wǎng)絡(luò)與車載路由器相連[7],攝像頭通過路由器將拍攝到的視頻傳給手機(jī),通過特定的APP 軟件和電腦終端,且攝像頭安裝在車的旋轉(zhuǎn)云臺上。路由器與單片機(jī)串口相連,通過串口給予單片機(jī)指令,然后進(jìn)行相應(yīng)控制。
執(zhí)行載物跟蹤人行走功能時(shí),由3 種傳感器共同完成。首先人體紅外傳感器檢測是不是人體,如果檢測到不是人體,則載物跟人功能條件不成立,機(jī)器人將不會(huì)做出反應(yīng);如果檢測到是人體,則超聲波傳感器工作;然后4 個(gè)超聲波傳感器接收返回的距離信息并且傳輸給從單片機(jī)處理,再通過4 位并行通訊傳給主單片機(jī),進(jìn)而控制電機(jī)的運(yùn)行。在尋人程序剛開始執(zhí)行時(shí),主單片機(jī)給從單片機(jī)控制指令,使之控制前端舵機(jī)運(yùn)動(dòng),將支架打開,尋人結(jié)束時(shí),支架落下。
4 結(jié)語
通過分析目前工廠存在的一些問題,如監(jiān)測設(shè)施不完善、功能單一等,發(fā)現(xiàn)當(dāng)今工廠缺少安全管理機(jī)制,且缺少檢測手段。通過對單一系統(tǒng)功能的分析,提出解決的具體方案,并給出實(shí)現(xiàn)此功能的電路原理圖。車間智能服務(wù)機(jī)器人開發(fā)設(shè)計(jì)以人為本、智能、便捷為主要目的,使未來工廠更加人性化,以安全為至高原則,為實(shí)現(xiàn)中國制造2025 計(jì)劃提供更好的安全服務(wù)。在當(dāng)代科技與社會(huì)高度發(fā)展的前提下,利用機(jī)器代替人在惡劣的環(huán)境完成生產(chǎn)任務(wù),極大地提高了生產(chǎn)效率,保障了安全生產(chǎn),為企業(yè)節(jié)省大量的人力、物力和財(cái)力。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32