高超聲速邊界層流動穩定性實驗研究
2020-03-13 01:29:48易仕和劉小林牛海波陸小革
空氣動力學學報 2020年1期
易仕和, 劉小林, 牛海波, 陸小革, 何 霖
(國防科技大學 空天科學學院, 湖南 長沙 410073)
0 引 言
邊界層轉捩是空氣動力學中的一個重要難題,特別是在超聲速和高超聲速條件下的邊界層轉捩問題更為復雜,相關認知更加欠缺。高超聲速邊界層轉捩廣泛存在于工程應用中, 例如高超聲速飛行器的舵面繞流、發動機進氣道內流動等. 它對高超聲速飛行器的氣動力、氣動熱以及發動機啟動等關鍵問題都有著重要的影響。研究表明[1],湍流狀態下,飛行器表面的摩擦阻力系數和傳熱系數大約是層流狀態下的3-5倍,且隨著飛行器的飛行速度的增加,湍流和層流狀態下的結果差異會更大。因此邊界層轉捩對超聲速、高超聲速飛行器的氣動特性和結構設計具有重要的影響。Mack[2-3]在20世紀80~90年代對邊界層中擾動波的線性發展進行了系統的研究,他發現當Ma>4時,邊界層中密度和速度的組合剖面會產生拐點,在當地聲速線和壁面之間會出現縱向輻射聲擾動波,并且認為這種由壓力脈動引起的擾動波(即第二模態波)在邊界層轉捩中起著主導作用。這之后,美國加利福利亞大學的Zhong等人[4]以及Kendall[5]和Stetson[6]等諸多學者[7-8]分別通過數值模擬和風洞實驗的方法都證明了第二模態波對高超聲速邊界層轉捩具有十分重要的影響。然而在飛行器真實飛行過程中,流動往往是非對稱的,此時邊界層速度剖面是三維的[9],橫流不穩定性就是主導三維邊界層轉捩的典型模態,存在于后掠翼[10]、橢圓錐[11]以及有迎角圓錐[12]流動中。Craig等人[13]利用熱線技術對帶迎角圓錐展向定常橫流渦進行了研究,并且測得了中心頻率為110 kHz的I型二次不穩定波。Moyes等人[14]通過數值模擬方法,得到了70~155 kHz和140~300 kHz的兩種二次不穩定模態。這兩種不穩定模態迅速增長,并且隨著定常橫流的飽和而變成主導模態。
本文首先通過對高超聲速條件下的圓錐邊界層進行實驗研究,對邊界層中的第二模態不穩定波進行分析。然后選擇三角翼非對稱三維流動,對邊界層中的橫流不穩定性進行了研究。
1 實驗設備與測試技術
1.1 高超聲速靜音風洞
圖1所示為國防科技大學空氣動力學實驗室高超聲速靜音風洞,它采用了上吹下吸的運行方式,噴管出口尺寸為Ф300 mm。為了提供低湍流度的自由來流,該風洞除了在穩定段設置了多孔倒錐、阻尼網和消音夾層等整流裝置之外,還在噴管喉道上游附近設計了抽吸裝置,其目的是抽走喉道壁面附近的邊界層,從而使噴管壁面邊界層盡量保持層流狀態,減小邊界層中渦結構產生的聲幅噪聲。通過控制抽吸閥門,可以改變風洞自由來流的湍流度水平。采用Kulite傳感器進行了風洞來流噪聲水平測量,典型結果如圖2所示,最低湍流度約為千分之一,達到靜音風洞標準[15]。
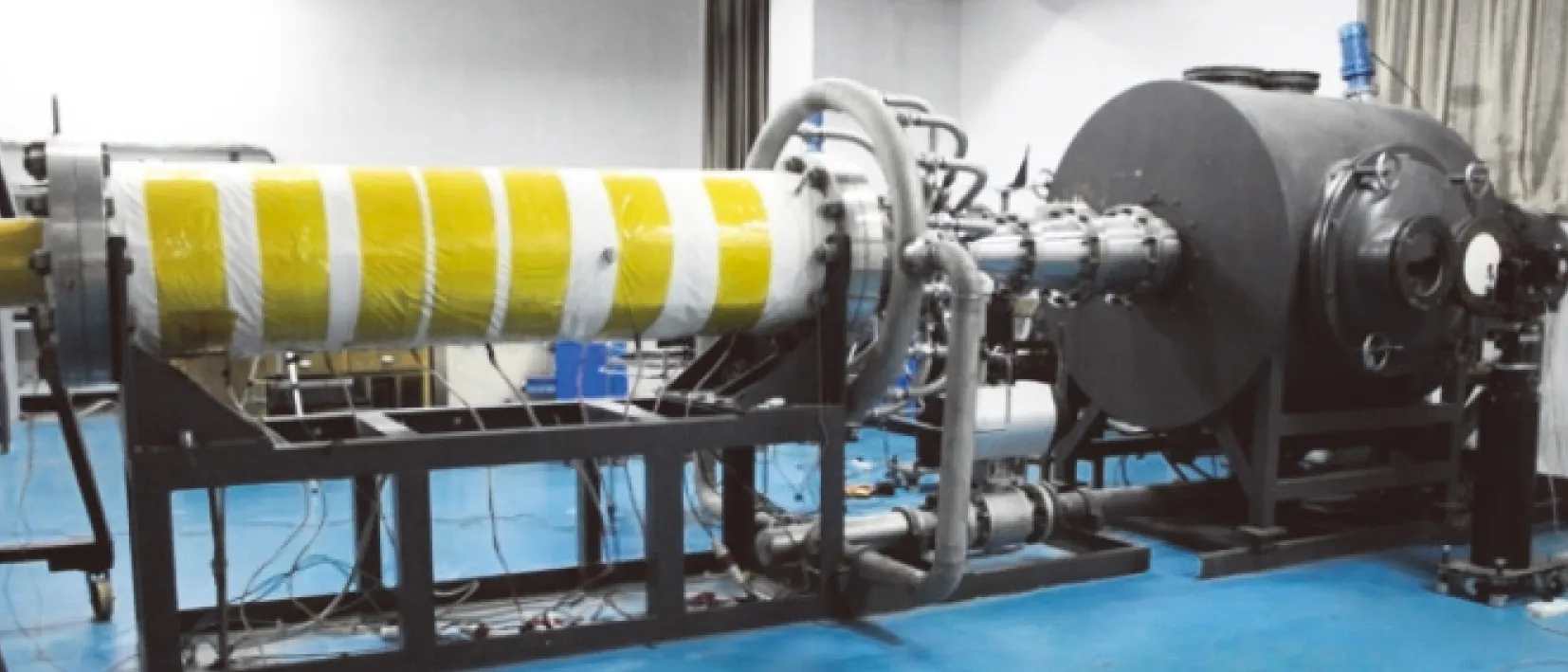
圖1 高超聲速靜音風洞Fig.1 Hypersonic quiet wind tunnel
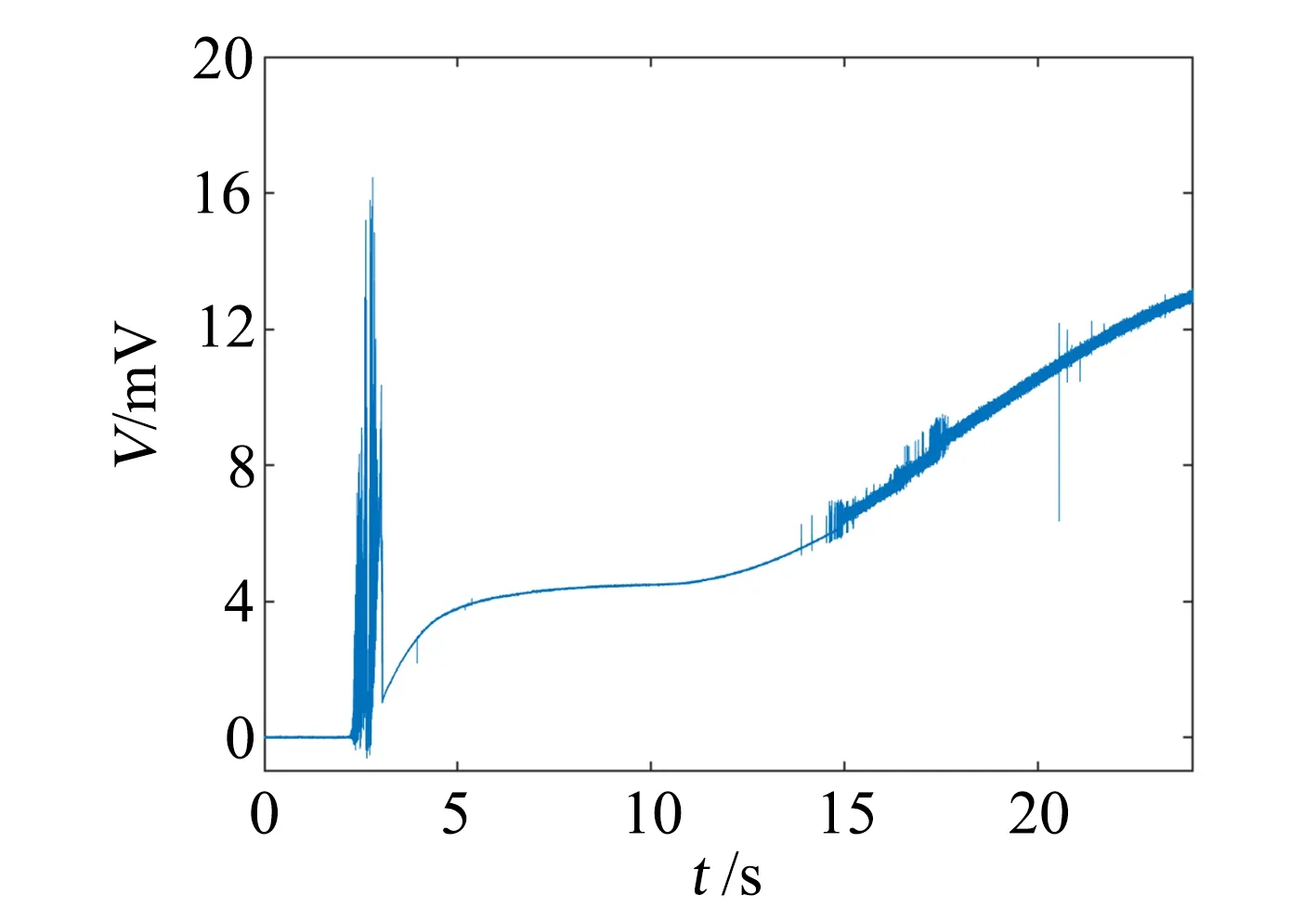
圖2 風洞來流噪聲水平測量典型結果Fig.2 Typical result of the freestream noise-level measurement
1.2 NPLS測試技術
基于納米示蹤的平面激光散射技術(Nano-tracer-based Planar Laser Scattering,NPLS)是本文作者自主研發的流動精細測試技術。NPLS系統組成如圖3所示,主要包括:納米粒子發生器,Nd:YAG雙腔脈沖激光器,同步控制器,CCD相機和計算機等。文獻[16-18]對NPLS技術的原理和適用性進行了詳細的闡述,前期研究證明NPLS技術具有高時空分辨率和高信噪比,適用于超聲速、高超聲速流場的精細結構研究。
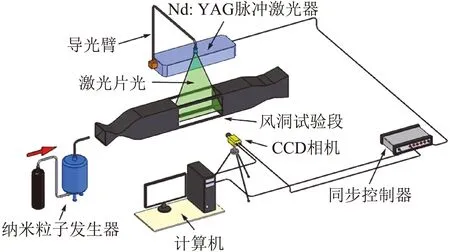
圖3 NPLS系統組成Fig.3 Schematic diagram of NPLS system
1.3 溫敏漆測試技術
溫敏漆(Temperature-Sensitive Paints,TSP)技術的原理是基于熒光分子的熱猝滅效應。熒光分子受到LED光源激發會發出長波的光線,光強會隨溫度的升高而降低,根據這個特性來進行溫度以及熱流測量。硬件包括TSP 涂料、LED光源、CCD相機系統、濾光片。本系統選用了單波長為 365 nm 的 UV-LED 等作為激勵光源,燈頭有兩個,總功率40 W,同時,結合TSP分子發光特性,選用規格為460 nm長波通的濾光片。所選用的CCD相機分辨率為2058 pixel×2456 pixel。
對TSP涂層的靜態標定在恒溫箱中進行,將噴涂TSP涂料的標定板放入恒溫箱,粘貼熱電偶測量準確溫度,同時采集對應溫度的TSP光強數據。標定的溫度范圍為10 ℃~80 ℃,每隔5 ℃采集一次數據。得到的標定曲線如圖4所示。
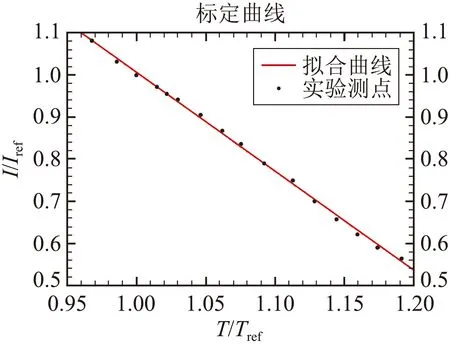
圖4 TSP涂層的靜態標定曲線[19]Fig.4 Static calibration curve of TSP coating[19]
2 第二模態不穩定波研究
2.1 直圓錐邊界層中第二模態波研究
在半錐角7°的直圓錐上進行了邊界層流動穩定性實驗研究。如圖5所示,圓錐頭部為R=0.1mm的尖前緣,圓錐總長L=536mm,底部直徑D=132 mm。在X方向上共布置了7個PCB高頻脈動壓力傳感器測點,1~7號測點具體位置分別為:X1=140 mm,X2=200 mm,X3=260 mm,X4=320 mm,X5=380 mm,X6=440 mm,X7=500 mm。圖6中給出單位雷諾數Re=0.5×107m-1時的脈動壓力功率譜結果。此時在X=380 mm和X=440 mm處觀察到了明顯的第二模態波,第二模態波的特征頻率從137.9 kHz降到127.1 kHz,此時第二模態波的幅值表現為明顯增加。但在X=500 mm處第二模態波消失,此時低頻成分所占能量比例大幅增加,并且在該位置處沒有觀察到明顯的高頻諧波成分出現,說明邊界層中的擾動波從X=440 mm發展到X=500 mm的位置時,擾動已經完成了非線性的增長過程,此時邊界層開始由層流狀態向湍流狀態轉捩。
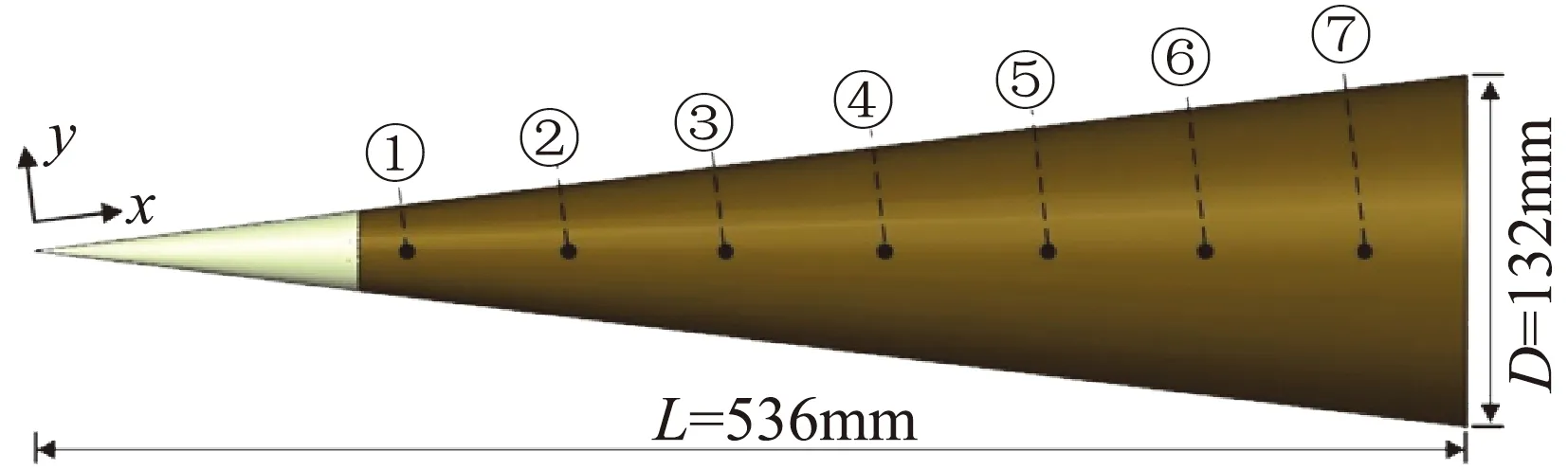
圖5 直圓錐示意圖Fig.5 Schematic diagram of straight cone
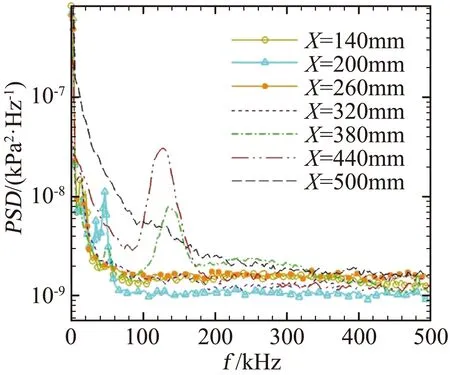
圖6 脈動壓力功率譜結果(Re=0.5×107 m-1)Fig.6 Power spectrum density of the fluctuation pressure(Re=0.5×107 m-1)
圖7所示為在雷諾數Re=0.5×107m-1條件下得到的圓錐邊界層NPLS結果。圖片分辨率為40 μm/pixel。此時從NPLS結果中能夠觀察到清晰的繩狀第二模態波結構。對比近年來相關學者采用基于二氧化碳冷凝散射等技術測量得到的第二模態波流動結果, NPLS采用二氧化鈦納米粒子作為示蹤粒子,受壁面溫度影響較小,能夠更加準確的反應出邊界層近壁面位置處的密度分布。
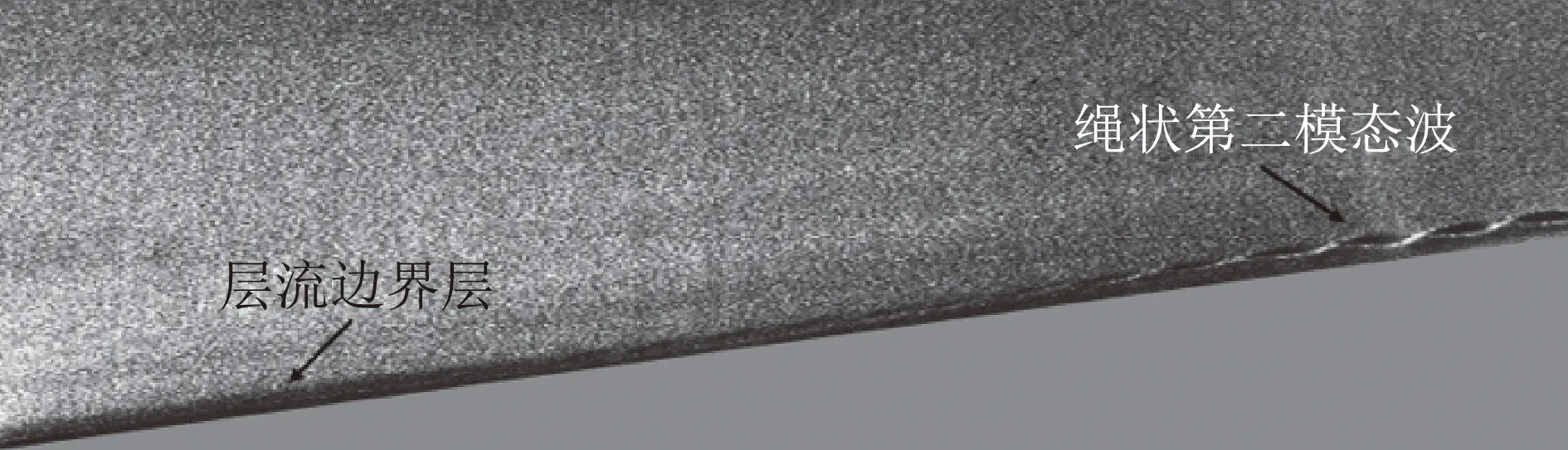
圖7 馬赫數6圓錐邊界層二次模態波NPLS測量結果(Re=0.5×107 m-1)Fig.7 The NPLS result of the second mode wave in the Mach 6 boundary layer on the cone
單幅NPLS圖片只能夠反應流場結構的瞬態結果,為了進一步對邊界層中流動結構進行定量的分析,選取具有時間相關性的兩幅NPLS圖片進行進一步的分析。圖8所示為單位雷諾數Re=0.75×107m-1條件下得到的兩幅時間相關NPLS結果,其間隔時間Δt=5 μs。選取圖中的繩狀第二模態波結構作為特征結構,通過從兩幅圖片相應位置可以量出特征結構的移動距離ΔS1=3.72 mm,從而可以計算出對應的第二模態波的傳播速度Vc=ΔS1/(cos7°×Δt)=750 m/s。根據該雷諾數條件下的總溫總壓條件,可以計算主流速度約為810 m/s,所以此時第二模態波的傳播速度約為主流速度的0.93倍。同時對該雷諾數條件下得到的所有第二模態波的波長進行統計平均得到第二模態波的統計波長λ約為2.99 mm,根據公式f=Vc/λ可以得到該工況條件下第二模態波的特征頻率f=251 kHz。
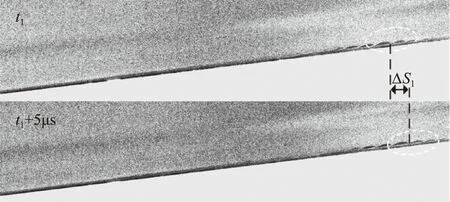
圖8 邊界層二次模態波時間相關NPLS測量結果Fig.8 Temporal-correlated NPLS results of the second mode waves in the boundary layer
2.2 裙錐邊界層中第二模態波分析
由于上述直錐邊界層中第二模態波發展演化較快,為了進一步對高超聲速邊界層轉捩過程中的第二模態不穩定性進行研究,繼續在如圖9所示的裙錐模型上開展流動穩定性相關研究。相比于母線為直線的直錐而言,它通過提供額外的逆壓梯度,使邊界層中擾動波的幅值放大倍數更大,這樣的外形也更有利于在實驗中對邊界層中的不穩定擾動波進行測量和分析。裙錐模型總長L=562 mm,圓錐底部直徑D=133 mm,圓錐母線曲率半徑R=3000 mm。圓錐頭部為r=0.1 mm的尖前緣。以圓錐頂點為坐標原點,S方向代表圓錐母線方向,而Yn方向代表壁面法向方向。
圖10所示分別為Re=0.9×107m-1和Re=1.2×107m-1條件下裙錐邊界層的典型NPLS結果。從圖中可以清晰分辨出相互交織的繩狀第二模態擾動波以及下游相應的湍流精細渦結構。對比2.1節中的結果,在裙錐邊界層中,第二模態波分布的流向范圍比直錐邊界層中第二模態波的分布范圍明顯更長,在邊界層轉捩之前,第二模態波增長和衰減過程都更加緩慢,這樣有利于基于NPLS結果,對邊界層中第二模態波發展的線性階段進行進一步的定量分析。
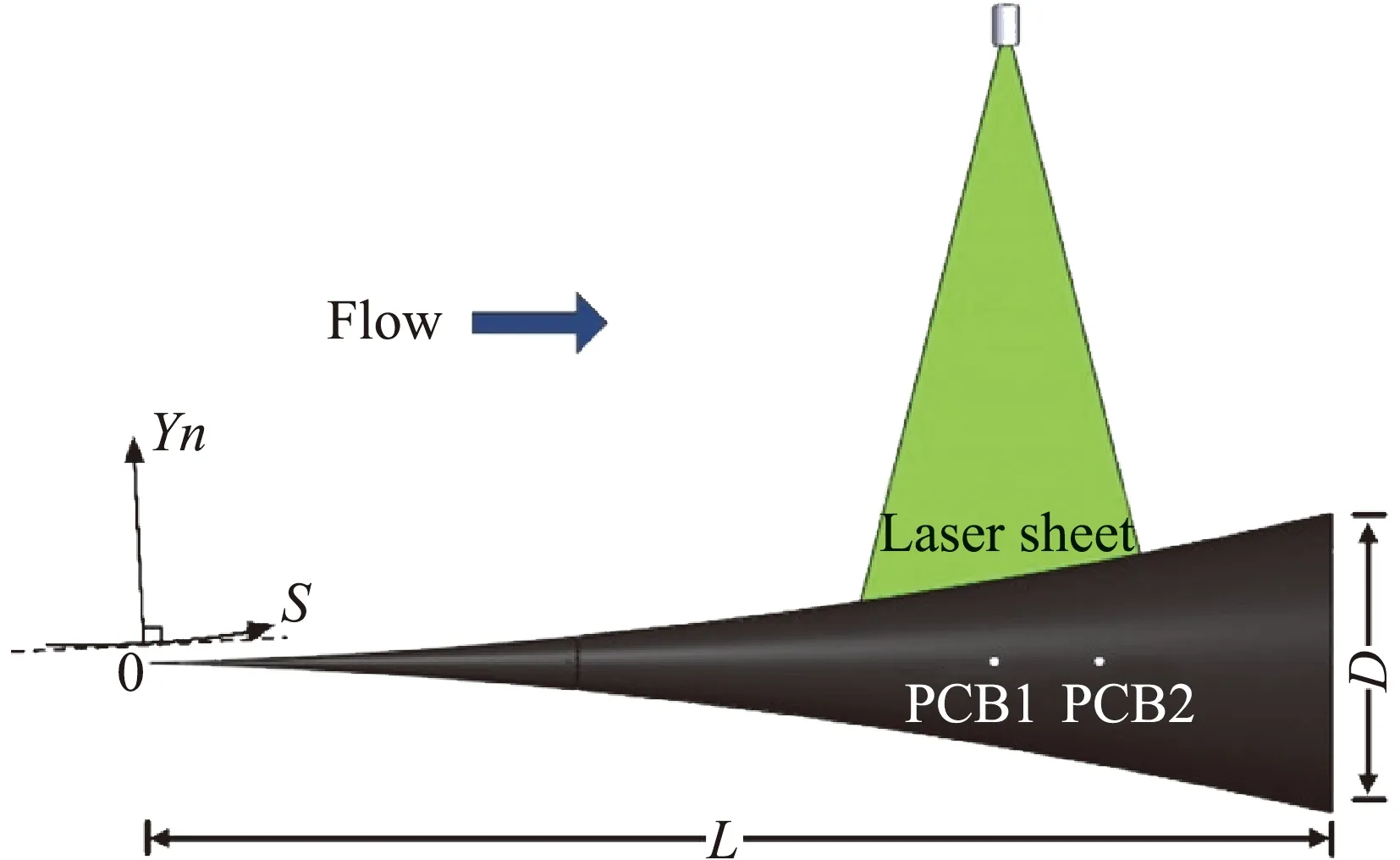
圖9 裙錐示意圖Fig.9 Schematic diagram of the flared cone
NPLS圖片反映了流場中的密度信息在空間位置上的分布情況,為了對擾動波的頻域成分進行分析,首先需要把NPLS圖片反映出的密度的空間分布信息轉化為特定空間位置上隨時間變化的密度信息。基于邊界層中第二模態波等特征結構,通過互相關算法首先求得第二模態波的傳播速度,然后將圖11所示時間相關的NPLS結果轉換為空間固定位置上的時序結果。圖12是基于時間相關NPLS結果計算得到的S=505 mm位置處功率譜分析云圖。結果表明基于NPLS結果不僅可以測量到第二模態波,同時也能準確捕捉到邊界層中高次諧波信息。


圖10 高超聲速裙錐邊界層轉捩NPLS照片(Ma=6)Fig.10 NPLS results of the hypersonic boundary layer on the flared cone (Ma=6)
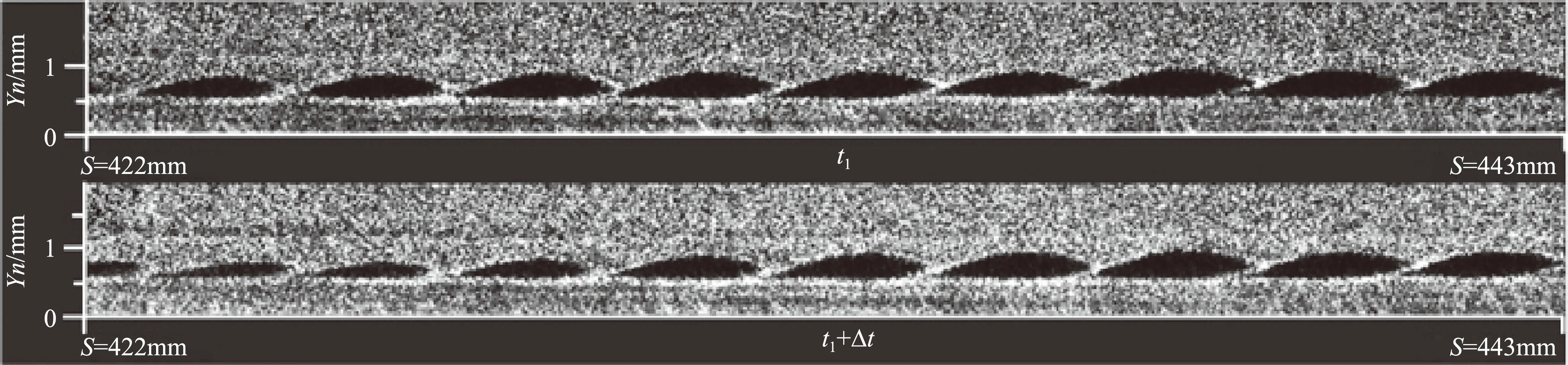
圖11 邊界層轉捩第二模態波時間相關NPLS照片Fig.11 Temporal-correlated NPLS images of the second mode waves in the boundary layer
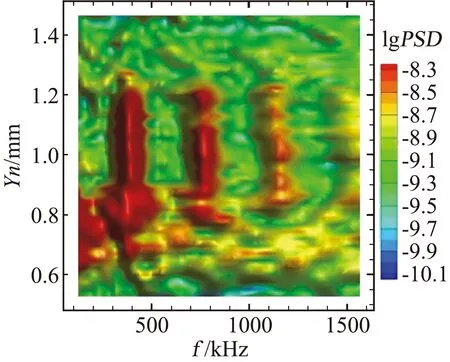
圖12 S=505 mm位置處功率譜分布云圖Fig.12 The power spectrum density at the position S=505 mm
3 橫流不穩定性研究
對于橫流不穩定性的研究,是在三角平板翼上進行的。實驗模型如圖13所示,長度為500 mm,寬度為250 mm,厚度為7 mm,頭部和前緣半徑為3.5 mm鈍前緣。定義的坐標系原點O位于模型頭部,沿流向方向為x軸,展向方向為y軸,垂直于展向平面向上為z軸。
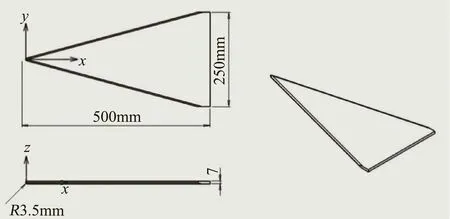
圖13 三角平板翼實驗模型Fig.13 Schematic diagram of triangular flat wing
如圖14為單位雷諾數3×106m-1,迎角為10°時的三角翼迎風面TSP結果。由圖14可知,在x=300~500 mm范圍內,出現了“肺葉狀”的高溫區,為邊界層轉捩引起。在靠近三角翼前緣的位置,轉捩陣面與前緣平行,此性質與后掠翼邊界層轉捩特性相同,屬于典型的橫流主導的邊界層轉捩。并且,轉捩陣面光滑而非鋸齒狀,說明此狀態下的主導模態是行進橫流波而非定常橫流模態。
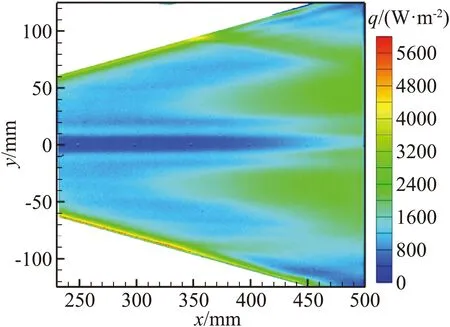
圖14 三角翼迎風面TSP測量結果Fig.14 TSP results on windward side of delta wing
利用NPLS技術,我們可以得到行進橫流波的精細流場顯示圖像,分析行進橫流波特性。圖15是對應狀態的NPLS圖像。由圖可知,在x=300~500 mm范圍內存在大量近似平行的大尺度橫流波結構,結構角方向為從三角平板的前緣偏離向對稱面。并且,渦結構的邊緣光滑,說明此時為首次橫流不穩定性,未發生二次失穩。
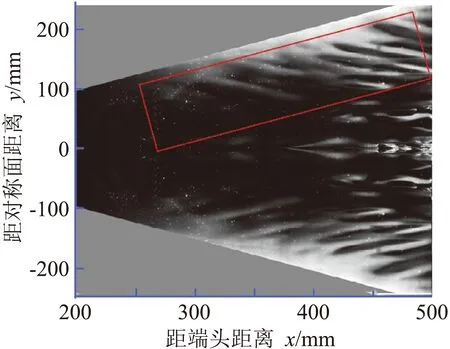
圖15 三角翼行進橫流波NPLS測量結果Fig.15 NPLS results of the traveling cross-flow wave on the delta wing
為了方便分析,我們將圖14中紅色框圈起來的部分取出,并進行二值化處理,得到渦結構的邊界,從而分析橫流波的波長和傳播速度。如圖16所示,兩幀圖像的跨幀時間為10 μs,紅線為t0時刻的橫流波下游邊緣,藍線為t0+10 μs時刻的橫流波邊緣。可以得到,該6個波的平均移動距離為3.83 mm,移動速度為383 m/s,而在平行于三角平板前緣方向的平均波長為26.65 mm。由公式f=Vc/λ,計算得到橫流行波的特征頻率為14.37 kHz。
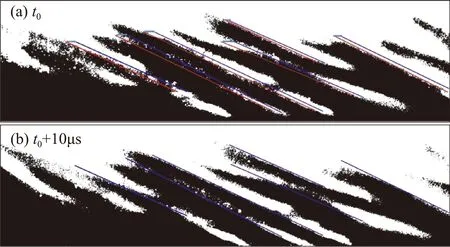
圖16 時間相關行進橫流波二值化結果Fig.16 Temporal-correlated binarization results of the traveling cross-flow wave
為了驗證由NPLS圖像得到的行進橫流波特性,我們在x=400,距前緣45 mm位置處布置了一個Kulite傳感器,得到的PSD結果如圖17所示,由圖可知,存在f=14 kHz附近的橫流行波信號,與NPLS圖像得到的結果互相驗證。進一步說明在靠近三角翼前緣部分,邊界層轉捩的主導模態為中心頻率約14 kHz的行進橫流模態。
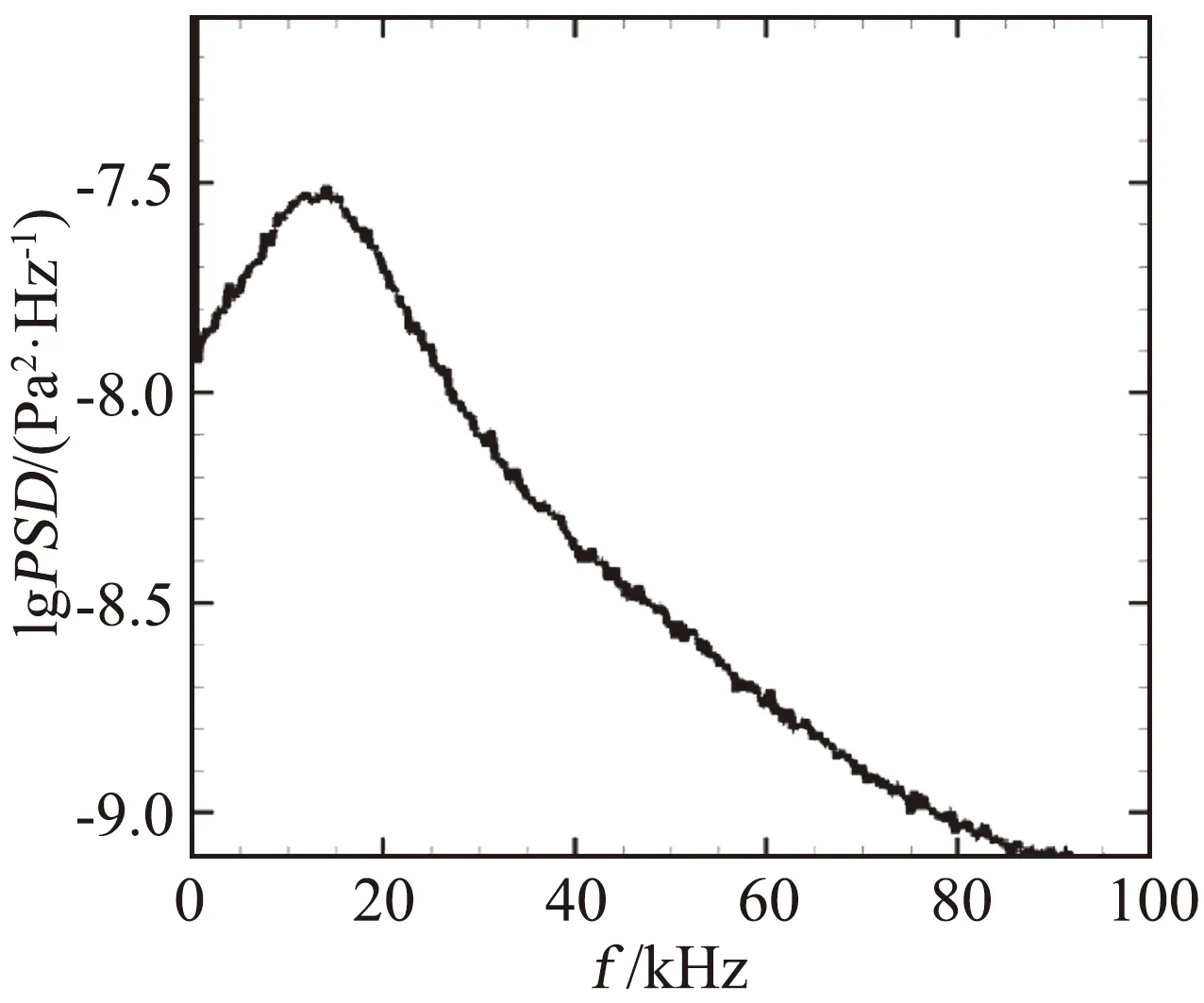
圖17 Kulite測得脈動壓力的PSD結果Fig.17 The PSD results of pressure measured by the Kulite transducer
4 結 論
本文主要通過NPLS等技術對圓錐和三角翼邊界層流動穩定性開展了風洞實驗研究。結果表明利用NPLS技術能夠測量得到邊界層中繩狀第二模態波的精細流動結構,且通過將NPLS照片得到的密度空間信息轉化為特定位置上的時序信號,可以進一步基于NPLS結果對擾動波進行定量研究,通過頻譜分析能夠測量到相應的高頻諧波成分。對于三角翼邊界層,在迎風面前緣的邊界層流動中,主導邊界層轉捩的模態為行進橫流模態。通過NPLS結果,得到了橫流波的結構角方向由前緣偏向對稱面,移動速度為383 m/s,平均波長為26.65 mm,中心頻率為14 kHz左右,與Kulite傳感器測到的壓力信號的PSD結果相一致。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39