單模光纖章動跟蹤耦合系統設計
2020-03-13 11:27:14吳天琦王睿揚于笑楠佟首峰
液晶與顯示 2020年1期
關鍵詞:效率
吳天琦, 王睿揚, 王 超, 于笑楠, 佟首峰*
(1.長春理工大學 光電工程學院,吉林 長春 130022;2.長春理工大學 空間光電技術國家地方聯合研究中心,吉林 長春 130022)
1 引 言
空間激光通信也稱為無線光通信,是指利用激光束作為載波在空間直接進行語音、數據、圖像等信息傳輸的一種技術,具有體積小、功耗低、機密性高、安全性高、數據速率高等優勢[1-5]。單模光纖(Single Mode Fiber,SMF)耦合技術是光纖激光通信系統的關鍵技術,由于光纖靜態角偏差、隨機角抖動誤差、大氣湍流像差等因素的影響,SMF耦合損耗的光功率較大,因此提高SMF的耦合效率成為多年來國內外的研究熱點[6-8]。
1990年,美國麻省理工學院提出了一種光纖章動的有源耦合方案,該方案結構簡單,其實驗系統中跟蹤帶寬約為1 kHz,耦合效率為63%[9]。2002年,美國的Weyrauch采用了盲優化的自適應光纖耦合系統來校正大氣湍流引起的波前畸變,實驗測得該系統單模光纖耦合效率約為60%[10]。2007年,電子科技大學提出優化耦合透鏡的直徑與焦距的比值的方法,耦合效率為61%[11]。2012年,日本Takenaka等制造了一種可在大氣湍流下以高頻率工作的快速轉向鏡,以提高光纖耦合效率,但這兩個子光路結構復雜且容易引入人為誤差[12]。2016年,上海光機所提出了基于激光章動的自動耦合方案,該方案中將耦合效率為73.5%,提高了6.5%[13]。2017年,成都光電所黃冠等提出基于FPGA平臺的光纖耦合方案,應用SPGD算法實現了150 Hz的校正帶寬[14]。2019年,長春光機所研究了能量反饋的單模光纖章動耦合算法并進行實驗,實驗結果表明在一定范圍內該算法對動態擾動有明顯抑制作用[15-16]。
在實際應用中,受大氣湍流、機械平臺振動、人為裝調誤差等因素的影響,空間光到單模光纖的耦合難度極高,嚴重制約空間激光通信系統的工作效果,故需要采用高效光纖耦合技術。本文基于空間光到單模光纖耦合理論,提出基于激光章動的高效耦合方法,通過單個光電探測器對耦合進單模光纖的能量進行檢測,即可計算出光斑與光纖間的徑向偏差,然后通過執行器實時補償此偏差,實現耦合效率的提高。本文首次對激光通信載荷的平臺振動對少模光纖耦合效率的影響進行了理論研究;基于激光章動方法,在光斑與光纖徑向偏差很大時(光斑與光纖在初始未重合),實現光斑對光纖的快速掃描、捕獲、跟蹤,完成空間光到單模光纖的高效耦合。而且本文實驗中所用的振鏡較其他實驗中的波前傳感器具有光路簡單、成本低等優勢。
2 單模光纖模場匹配原理
本文研究采用基于單模光纖的激光章動跟蹤技術提升空間光到單模光纖的耦合效率,在討論激光章動跟蹤技術前,首先介紹單模光纖的模場匹配原理,并分析了基于單模光纖的激光章動跟蹤技術可實現的最高耦合效率。

圖1 單模光纖模場簡化模型Fig.1 Simplified model of single mode fiber mode field
在大氣中傳輸的激光信號經過口徑為D、焦距為f的透鏡匯聚后,在焦平面形成一個艾里斑,如圖1所示。圖1中ω1為艾里斑半徑(ω1=1.22λf/D),半徑ω0為單模光纖模場半徑。則空間光到單模光纖的耦合效率可以表示為[17]:
(1)
式中;A(r)為艾里斑模場分布,M(r)為近似高斯分布的單模光纖基模模場。A(r)與M(r)的表達式分別為:
(2)
(3)
式(2)中:r為光斑任意位置到光斑中心的徑向距離,λ為信號光的波長,J1為一類零階貝塞爾函數。當艾里斑與光纖間存在徑向偏差ρ時,M(r)可表示為[14]:
(4)
式中:I0為零階修正貝塞爾函數。將式(4)代入式(1),可推導出與徑向偏差有關的耦合效率表達式為:
(5)
根據公式(5)可計算出,當光斑半徑與光纖模場半徑滿足ω1/ω0=1.711且兩者中心完全重合時,耦合效率可以達到的最大值η=81.45%。由以上公式中的變量間的關系得到圖2中耦合效率與光斑大小、徑向偏移之間的關系。圖2中縱坐標為耦合效率,橫坐標為光斑半徑與光纖模場半徑的比值,不同顏色曲線表示不同徑向偏移時的耦合效率。從圖中可以看出,隨著徑向偏差的增大,耦合效率急劇下降,因此要對徑向偏差進行補償。
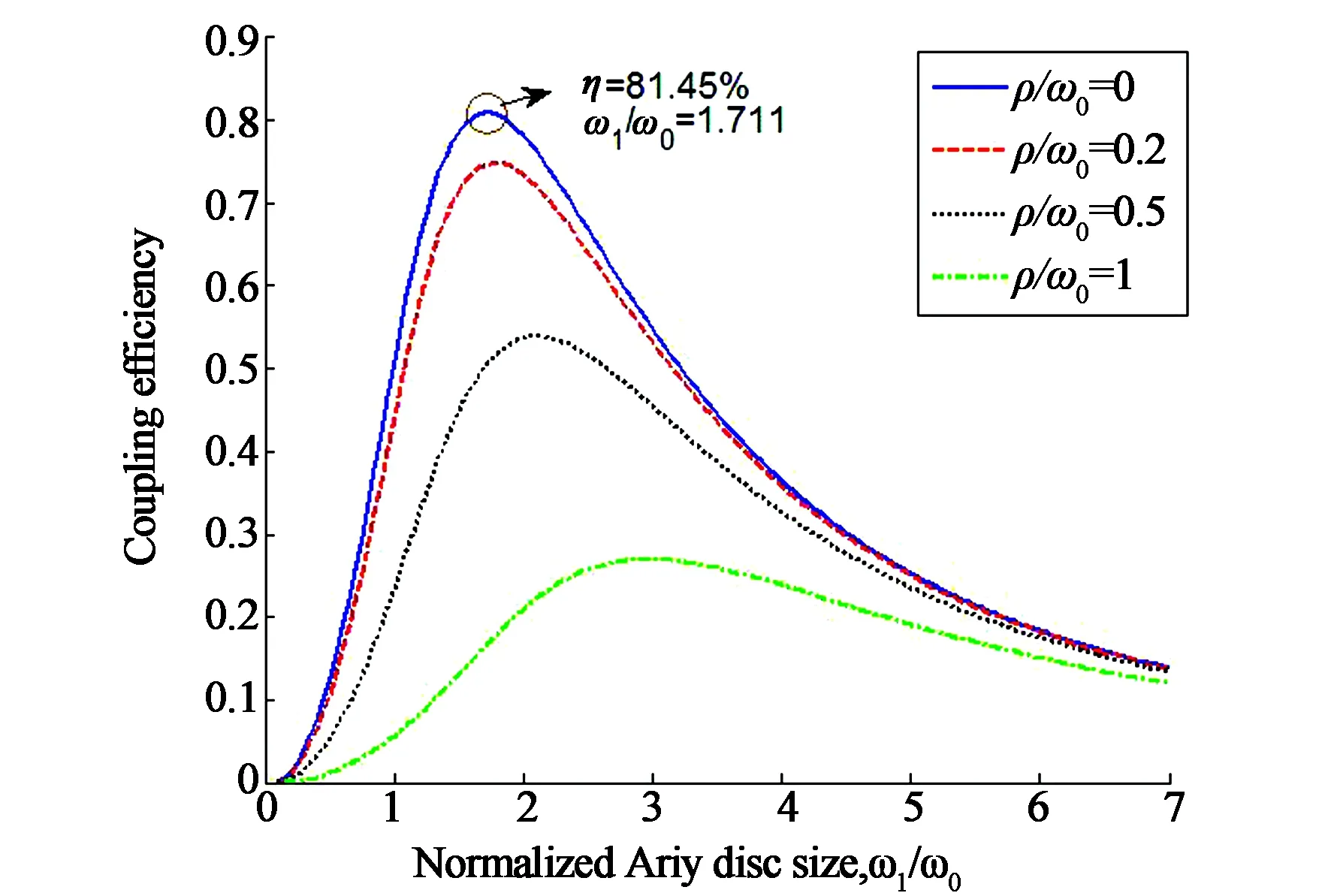
圖2 耦合效率與光斑大小和徑向偏移的關系仿真曲線Fig.2 Simulation curves of coupling efficiency versus spot size and radial offset
3 系統組成及算法設計
3.1 章動跟蹤系統組成
激光章動系統組成如圖3所示,包括激光器、準直鏡、快速反射鏡(Fast Steering Mirror,FSM)、耦合透鏡、雪崩光電二極管(Avalanche Photo Diode,APD)及控制系統。激光器發射的光束首先經過準直鏡進行擴束,然后入射快速反射鏡進行徑向偏差補償與激光章動,接著通過耦合透鏡聚焦并耦合到單模光纖內,再由APD檢測光功率,最后將APD輸出的信號傳輸至控制系統。控制系統對光纖位置進行計算,并將信號反饋到快速反射鏡中,以實現徑向偏差補償和章動幅度的優化。
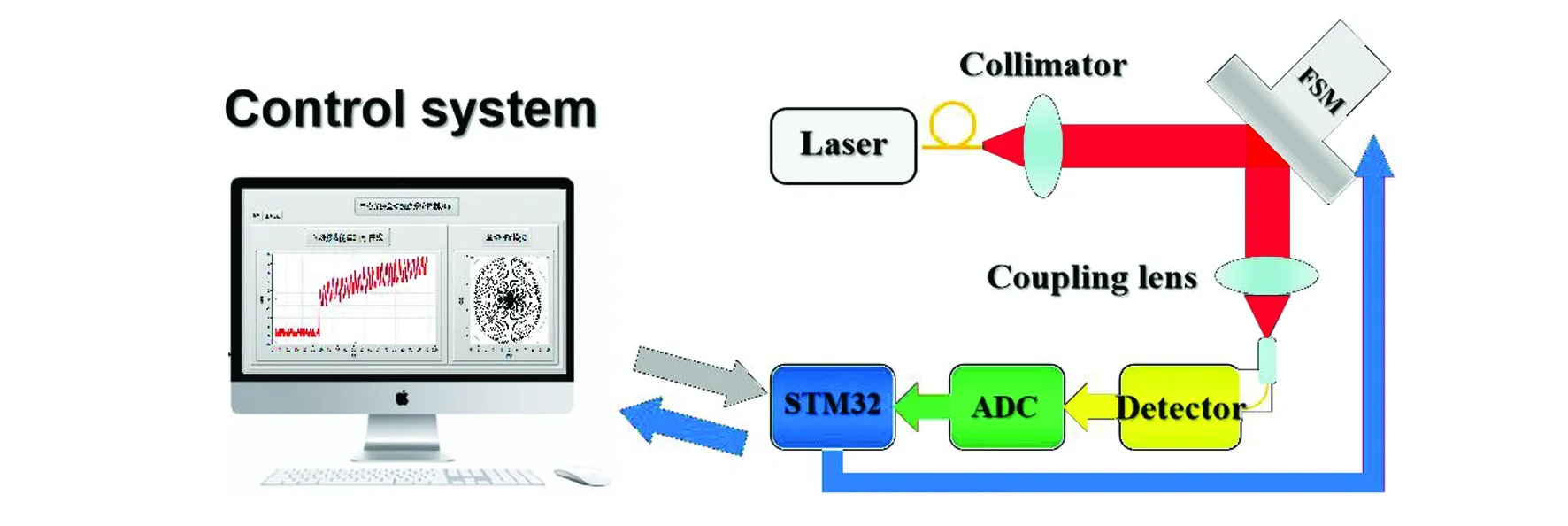
圖3 激光章動系統Fig.3 Laser nutation system
3.2 章動跟蹤系統算法設計
當光纖與光斑間存在徑向偏差時,耦合效率的表達式為:

(6)

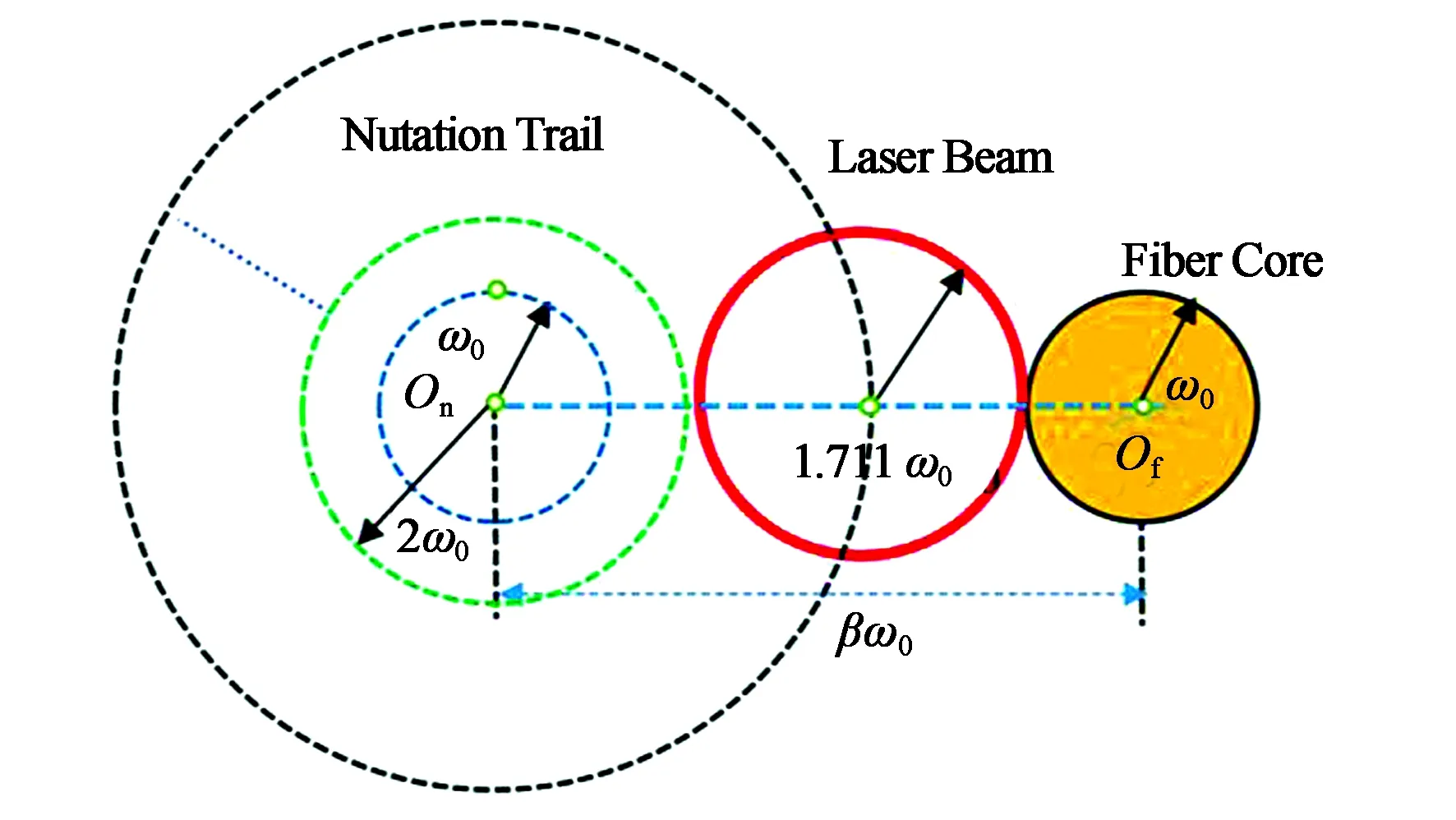
基于上式進行激光章動算法設計。在光束經過耦合透鏡匯聚后,假設光斑能量Pin保持不變,設艾里斑尺寸為1.711ω0,章動掃描半徑為ω0。首先,考慮初始狀態下光斑與單模光纖未重合的情況。如圖4(a)所示,初始時刻光斑中心On與光纖中心Of間距為βω0(β為一未知實數),光斑以On為圓心做半徑為ω0的圓形章動掃描,其掃描軌跡為圖中藍色虛線。顯然,此過程中光斑與光纖(黃色圓形)不會發生重疊。改變章動掃描半徑為2ω0,光斑掃描軌跡為圖中綠色虛線,此時光斑與光纖仍未發生重疊。接下來,進一步增大掃描半徑,直到掃描半徑大于黑色虛線軌跡半徑,光斑與光纖發生面積重疊,探測器檢測到能量。當探測器開始有信號輸出時,系統開始改變掃描策略,以某一小幅度Δrc-n增大光斑章動掃描半徑,如圖4(b)所示。設章動掃描中心為坐標原點,rc-n1為光斑(圓形紅色實線)與光纖首次重疊時的掃描半徑,當光斑與光纖重疊面積最大時,光斑與光纖間距為rc-1,光斑在整個掃描周期內僅會出現一次與光纖面積重疊最大的情況,相應地,探測器僅在一個時刻內輸出最大值Pc-max1。改變章動掃描半徑為rc-n2,當光斑位于紅色虛線圓圈位置時,與光纖重疊面積最大,此時兩者間距為rc-2,探測器輸出最大值為Pc-max2。上述過程為激光章動粗掃描階段,滿足如下數學關系[18]:
(7)
(8)
rc-2-rc-1=rc-n2-rc-n1=Δrc-n,
(9)
(a)光斑與光纖無重合(a)Spot without coincideence with fiber
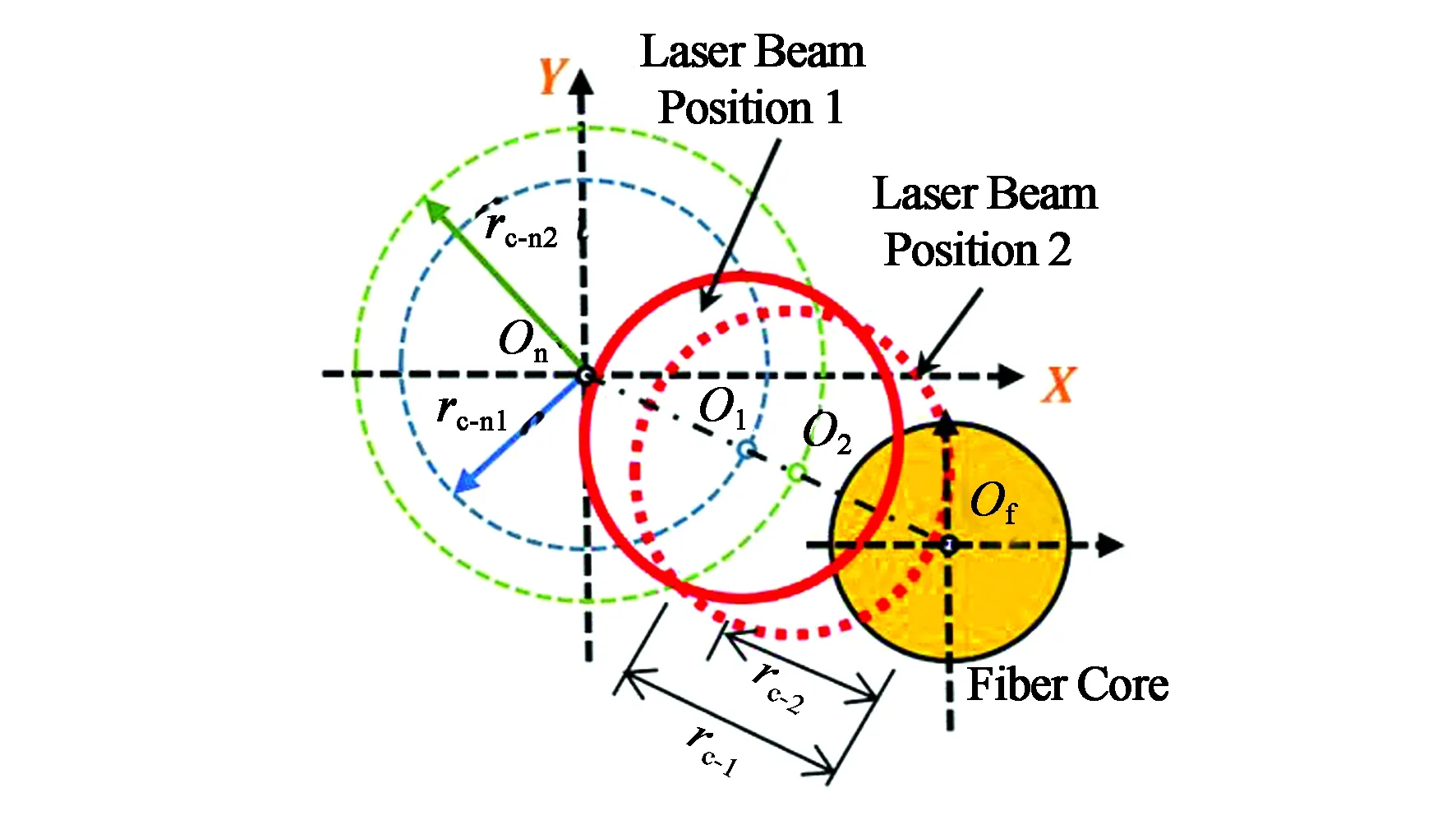
(b)光斑與光纖有重合(b)Spot overlap with the fiber圖4 激光章動粗掃描階段原理Fig.4 Principle of laser nutation coarse scanning stage
光纖中心到光斑中心的橫向偏移量xfiber與縱向偏移量yfiber的表達式分別為:
(10)
式中:ω為章動掃描角速度,t為時間。通過上式可計算出光纖中心的相對位置坐標(xfiber,yfiber)。得出光纖位置坐標后,通過快速反射鏡進行徑向偏差補償。因采樣點數量有限,故通過計算得到的光纖坐標并不精準,為了加快粗掃描階段的捕獲過程,實現光斑與光纖大部分重疊即可。為了獲得精確的坐標,需要進一步的精掃描。
經粗掃描與補償后,光斑中心與單模光纖中心已經比較接近,但影響耦合效率的徑向偏差仍然存在。圖5為激光章動精掃描階段示意圖。圖中藍色虛線為精掃描階段的章動軌跡,由于徑向偏差的存在,圓形掃描軌跡rc-n與光纖并不同心。可見,掃描過程中光斑與光纖始終有重疊部分,探測器有持續輸出,且在每個掃描周期內均有最大與最小值出現。探測器輸出最小值Pf-min時,光斑與光纖徑向偏差為rf-max;探測器輸出最大值Pf-max時,光斑與光纖徑向偏差為rf-min,則有如下關系:
(11)
(12)
rf-max+rf-min=2rf-n.
(13)
光纖的中心位置坐標的表達式為[16]:
(14)
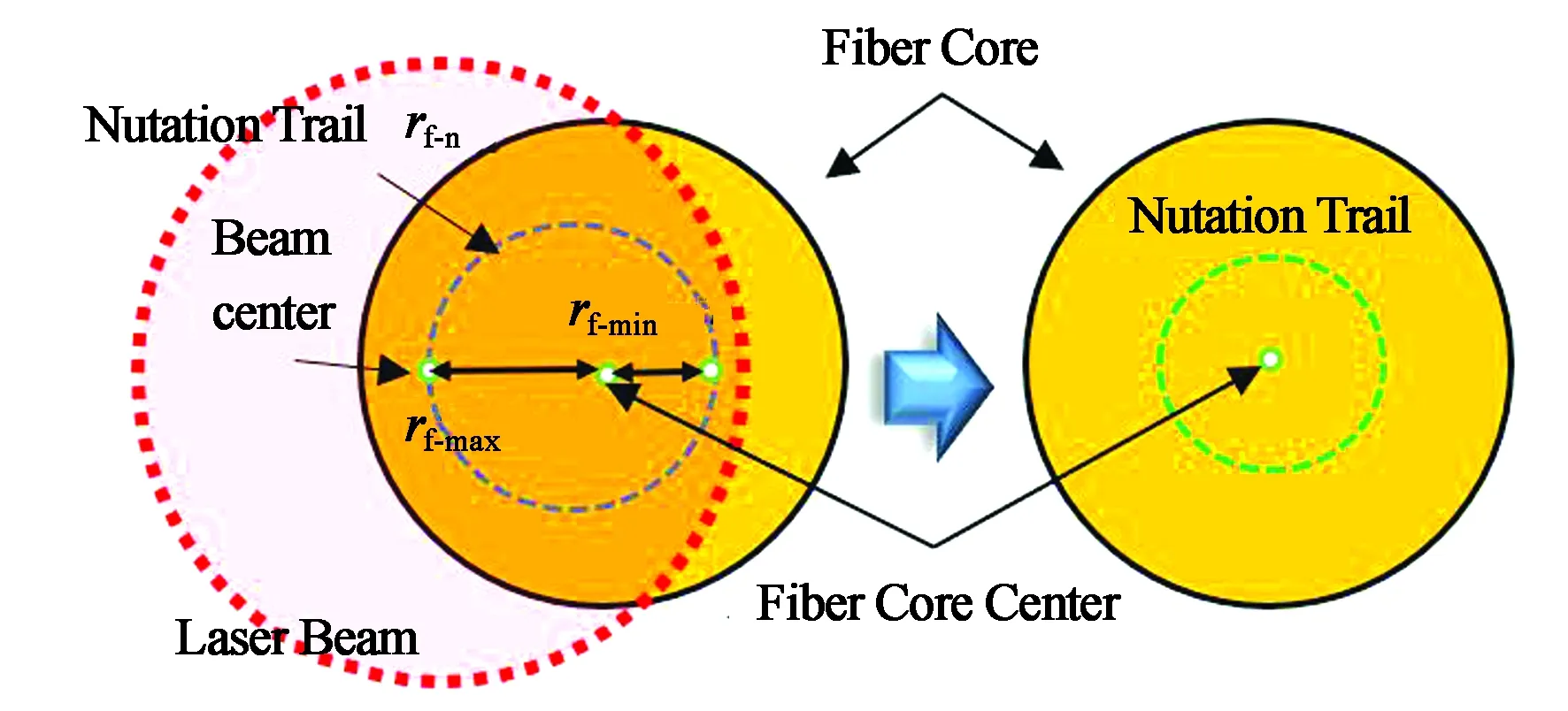
圖5 激光章動精掃描階段原理Fig.5 Principle of laser nutretization scanning phase
根據計算結果,通過快速反射鏡進行徑向偏差補償,使光斑中心與光纖中心完全重合。接著,使光斑以某一幅度繞光纖中心進行章動掃描,如圖5中綠色虛線所示。根據圓的對稱性,在此掃描周期內,光斑與光纖間存在一固定徑向偏差,兩者重疊面積不變,探測器輸出信號的平均功率不變。此固定徑向偏差的存在目的是抵消隨即抖動引入的偏差。整套系統算法流程如圖6所示。
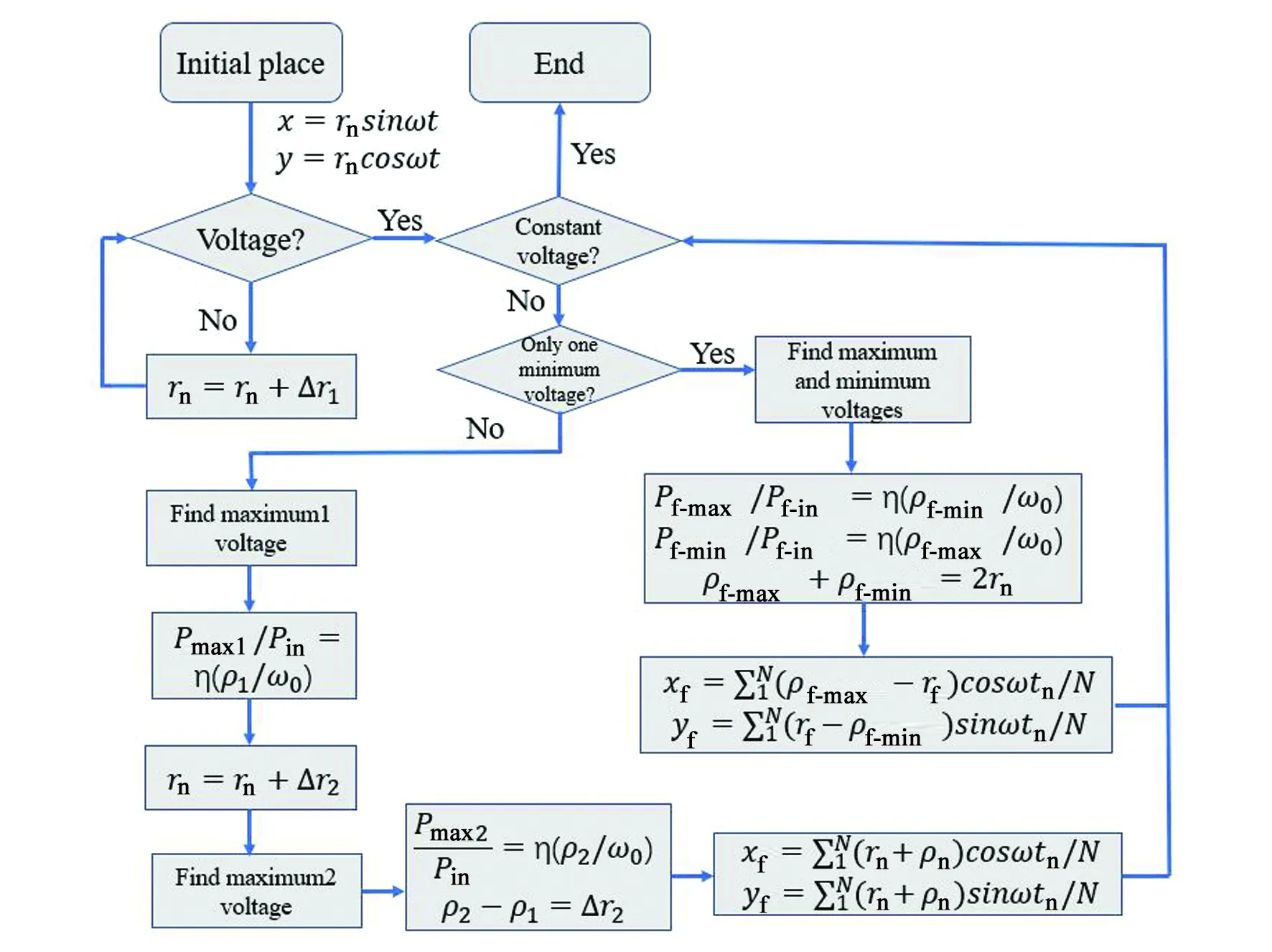
圖6 章動算法流程Fig.6 Nutation algorithm flow
4 實驗測試及結果分析
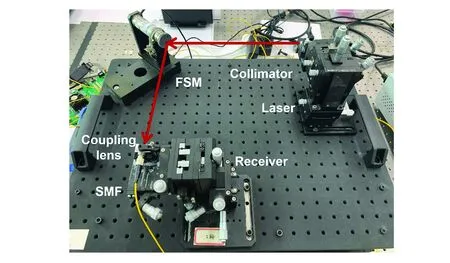
圖7 章動系統實驗平臺Fig.7 Nutation system experiment platform
根據上文的章動原理、系統組成以及算法設計,本章針對激光章動跟蹤系統的性能進行實驗測試。實驗平臺的搭建如圖7所示,激光束從光纖出射后,首先經過準直鏡,然后通過快速反射鏡進行偏轉,再經過準直鏡后進入光纖,從而進入APD。同時,采用光功率計監測激光器的發射功率與通過耦合進入光纖的光功率。實驗器件選型如表1所示。
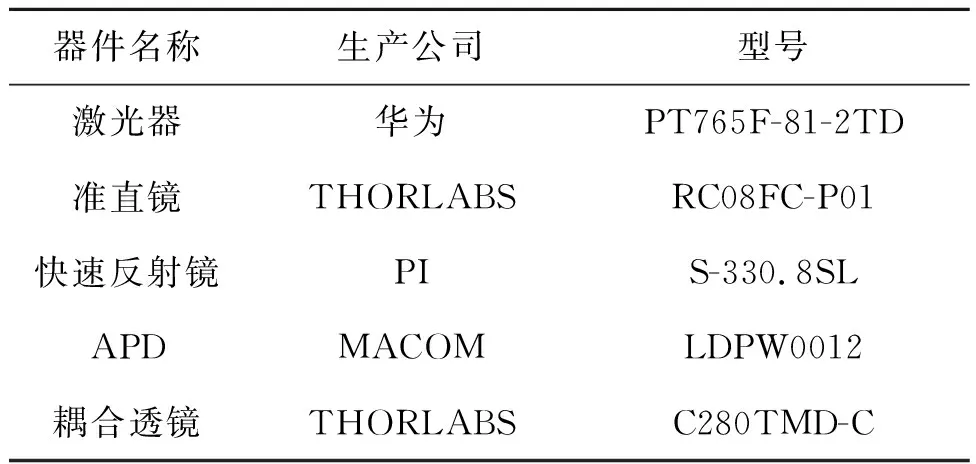
表1 實驗器件選型Tab.1 Experimental device selection
4.1 耦合效率測試
耦合效率是章動跟蹤系統最重要的性能參數,直接決定了空間光耦合到光纖中的光功率。在實驗中,采用波長為1 550 nm的激光器作為光源,如圖8所示,其發射光功率為-6.98 dBm。

圖8 激光器發射光功率Fig.8 Laser emitting optical power
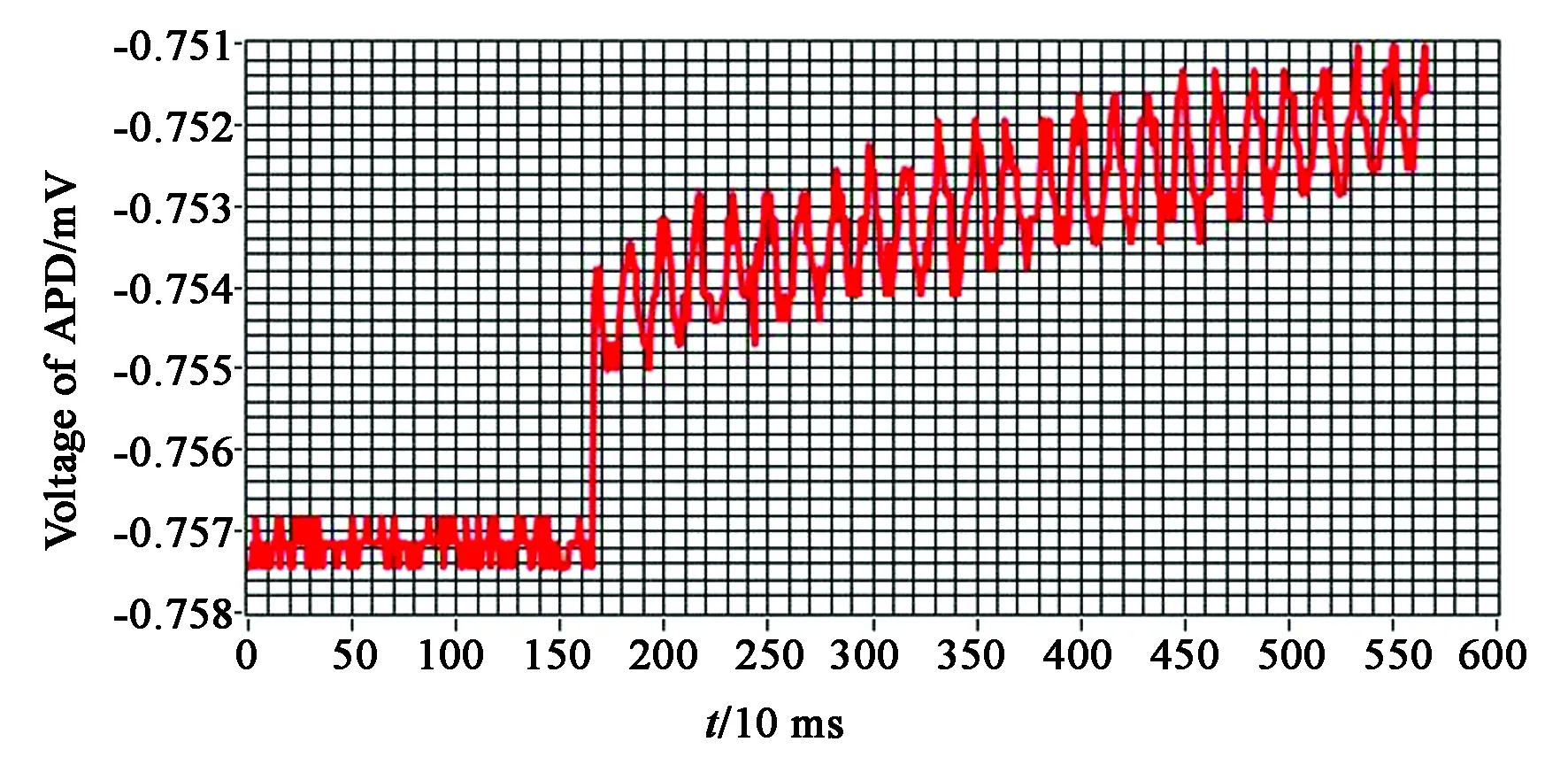
圖9 章動中心逐漸向光纖中心收斂時APD輸出的電壓Fig.9 Voltage of the APD output when the nutation center gradually converges toward the center of the fiber
首先進入章動粗掃描階段,此時章動半徑逐漸擴大,直到APD檢測到信號光,產生電信號后,開始進行章動精掃描。根據APD輸出信號的強度變化,章動中心逐漸向光纖中心收斂,章動半徑逐漸減小,章動掃描階段APD輸出電壓如圖9所示。從圖中可以看出在粗掃描階段完成對信號光的捕獲后,隨著章動中心逐漸向光纖中心收斂以及章動半徑逐漸減小,APD輸出信號逐步提升。
直至APD輸出信號的平均值保持恒定,實現章動中心與光纖中心重合,此時APD輸出信號的曲線如圖10所示。從圖中可以看出APD輸出信號的強度仍有抖動,但抖動范圍保持不變,以此判定系統實現了章動跟蹤。實現章動跟蹤后,耦合進入單模光纖的光功率為-9.70 dBm,如圖11所示。通過計算得到系統的耦合效率為53.5%。
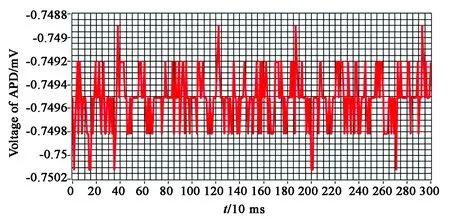
圖10 章動中心與光纖中心重合時APD輸出的電壓Fig.10 Voltage of the APD output when the nutation center coincides with the fiber center

圖11 章動跟蹤時耦合進入光纖的光功率Fig.11 Optical power coupled into the fiber during nutation tracking
4.2 徑向偏移對耦合效率的影響
本文第二章根據理論分析了徑向偏移和光斑半徑對耦合效率的影響,本節將針對徑向偏移的影響對系統進行測試。測試中,以光纖中心為原點建立坐標系,保持光斑面積不變,分別測量不同章動中心至光纖模場中心距離時的耦合效率。實驗數據如圖12所示,從圖12中可以看出隨著徑向偏移增大,耦合效率降低,其變化趨勢與理論分析的一致。
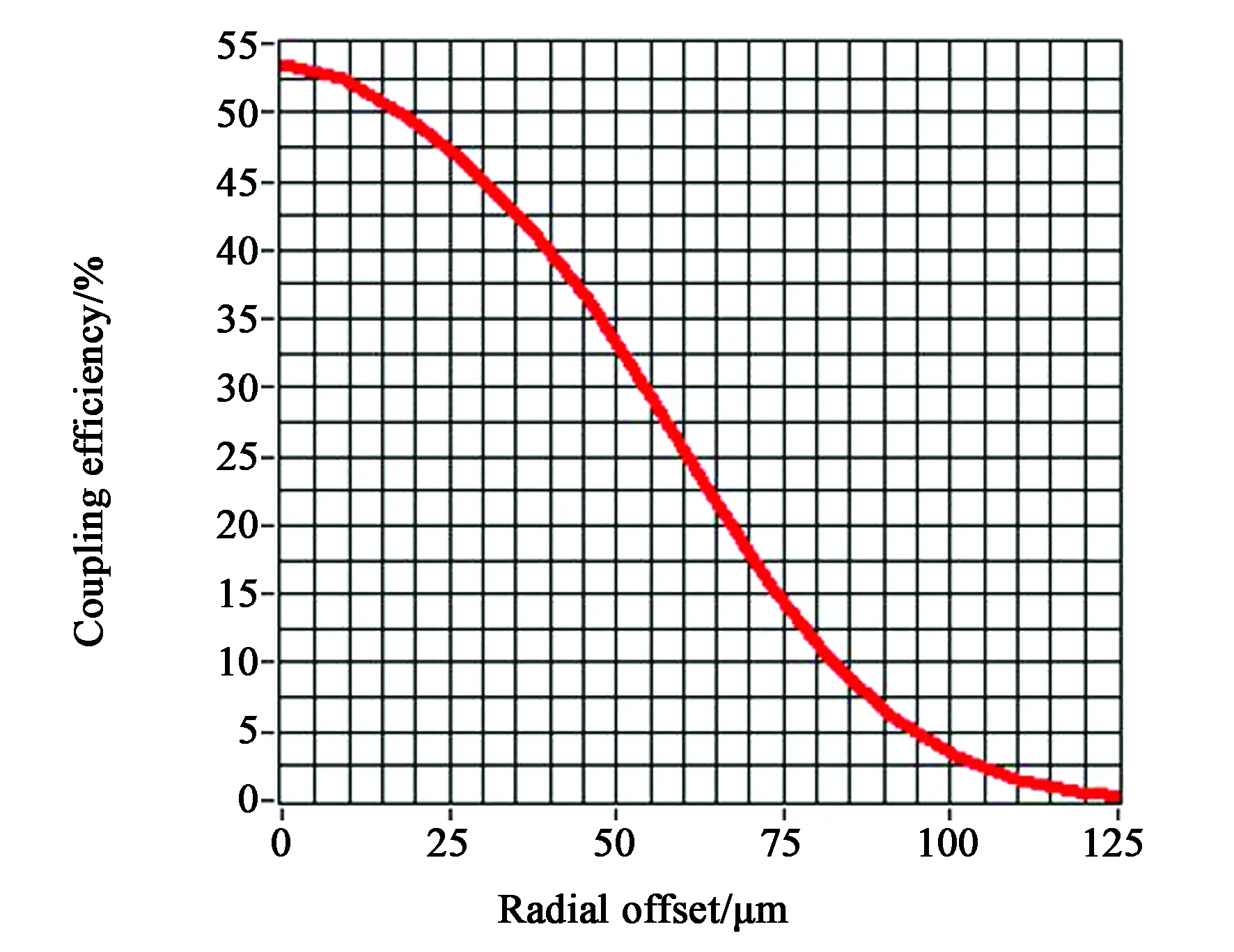
圖12 徑向偏移與耦合效率的關系曲線Fig.12 Radial offset and coupling efficiency
4.3 光斑半徑對耦合效率的影響
本節針對光斑大小對耦合效率的影響對系統進行測試。測試中,保持徑向偏移不變且為最小值,通過改變耦合透鏡的工作距離以實現不同光斑半徑時的耦合效率的測量。實驗結果如圖13所示,從圖13中可以看出當光斑半徑與單模光纖模場半徑的比值為1.711倍時,耦合效率最大,當光斑半徑發生變化時,耦合效率的變化趨勢與理論分析的一致。
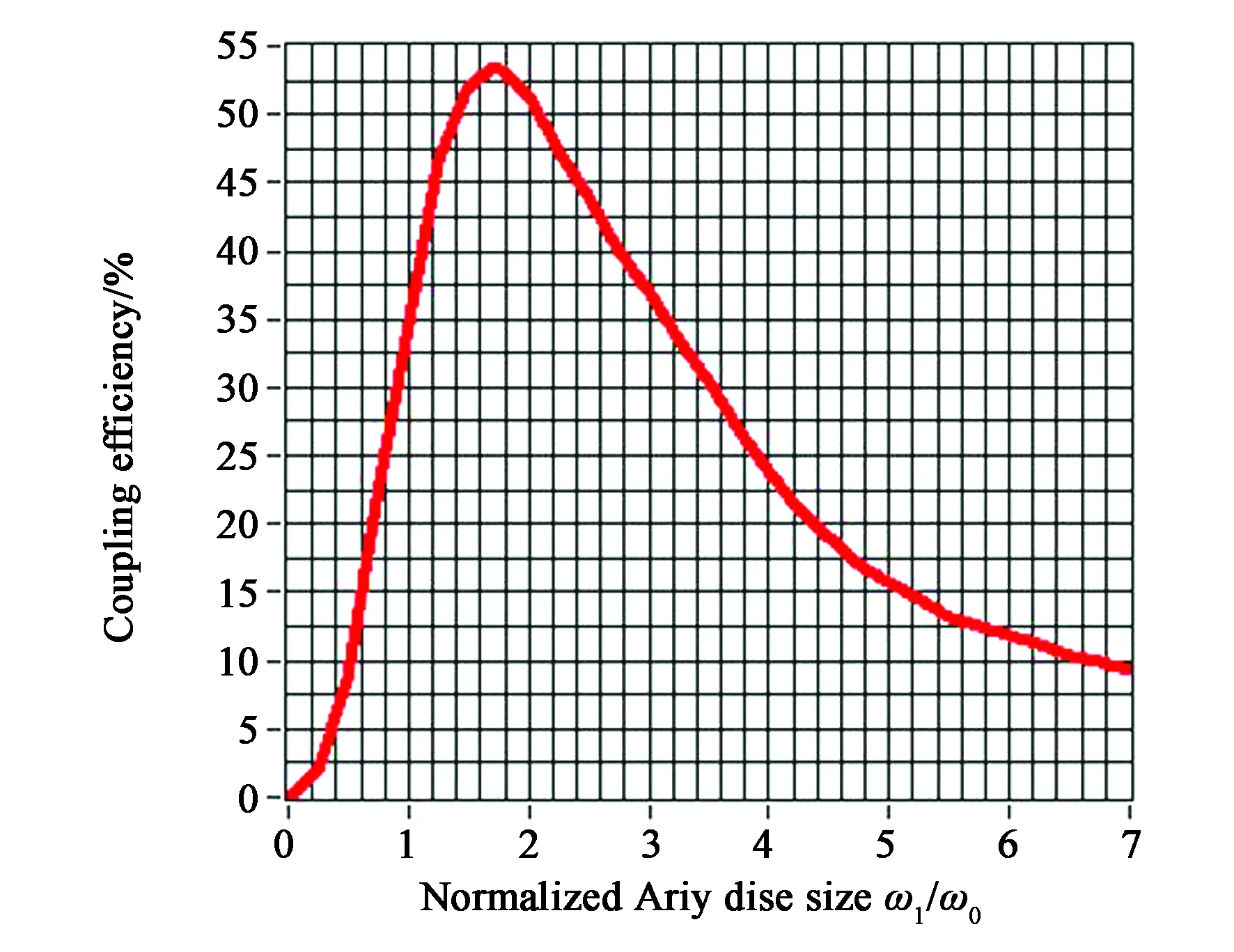
圖13 光斑半徑和單模光纖模場半徑的比值與耦合效率的關系曲線Fig.13 Relationship between the ratio of the spot radius and the mode field radius of a single-mode fiber to the coupling efficiency
5 結 論
本文根據單模光纖的模場匹配原理進行了激光章動跟蹤系統以及算法設計,通過實驗測得在激光章動跟蹤時單模光纖的耦合效率最高為53.5%。并對徑向偏差以及光斑大小對耦合效率的影響進行了測試,得到了徑向偏移與耦合效率的關系曲線以及光斑半徑和單模光纖模場半徑的比值與耦合效率的關系曲線。通過與理論分析的仿真曲線進行對比,其變化趨勢一致。根據理論分析,徑向偏差對耦合效率的影響最大。實驗結果與理論分析仍具有一定差距,本文設計的章動算法及采用的硬件對實驗結果均存在影響。硬件方面的影響主要包括APD及放大電路的噪聲、A/D及D/A的精度、振鏡的精度以及光路誤差;軟件方面主要有章動半徑、收斂步長及采樣點個數對耦合性能的影響。這些因素都導致實際耦合效率降低。在下一步的研究中將針對以上因素對系統進行完善,從而獲得更高的耦合效率。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32