基于MSP430兩輪自平衡小車算法的研究
2020-03-15 05:49:32張秀堅(jiān)
科海故事博覽·下旬刊 2020年3期
張秀堅(jiān)


摘 要 自平衡小車的平衡就像是一個鐘擺,它的狀態(tài)是不平衡的,因此它必須要有一個足夠使其穩(wěn)定平衡的控制力,來使其平衡。自平衡小車工作原理是將小車的加速度和當(dāng)前的姿態(tài)信息進(jìn)行整合,小車的空間姿態(tài)三軸數(shù)據(jù)和運(yùn)動的空間加速度由MPU-6050來測量,小車車輪的轉(zhuǎn)速由光電編碼器所測得的脈沖信號來獲得。在運(yùn)動學(xué)的基礎(chǔ)之上,由TI公司的MSP430芯片處理數(shù)據(jù),運(yùn)算得出保持平滑的姿態(tài)電機(jī)所需數(shù)據(jù),再把這個數(shù)據(jù)來控制驅(qū)動馬達(dá)的PWM波形的輸出占空比, 以此來保持車體的平衡。小車的實(shí)際測試結(jié)果表明:小車在直立平衡時傾斜角度從小車的側(cè)面看為-6°。使用自平衡車不但體積小,而且結(jié)構(gòu)簡單,具體特點(diǎn)為工作空間狹窄,但動作靈活,在安全、軍事等領(lǐng)域應(yīng)用前景非常廣泛。
關(guān)鍵詞 陀螺儀 MSP430F149 光電編碼器 PWM 互補(bǔ)濾波 數(shù)據(jù)融合
中圖分類號:TN29 文獻(xiàn)標(biāo)識碼:A 文章編號:1007-0745(2020)03-0009-07
1 前言
1.1 研究意義
應(yīng)用意義:自平衡車巧妙地運(yùn)用到了其自身的重力來保持其平衡,并把這種重力用整個控制系統(tǒng)轉(zhuǎn)換成動力,它本身的重力越大,行駛動能也會變得越大,比較環(huán)保。駕駛?cè)藛T不必?fù)?dān)心如何來使小車自身平衡,平衡小車自身就有穩(wěn)定控制系統(tǒng),使其平衡。使用自平衡車解決了殘疾人不能騎自行車的問題。車身小巧靈活,可以作業(yè)在狹窄路段以及大轉(zhuǎn)角的工作場。平衡小車的優(yōu)點(diǎn)有很多:環(huán)保、方便、快捷、靈活,具有很廣闊的應(yīng)用前景。他將會成為未來的主流。
研究意義:自平衡小車車身不是完全穩(wěn)定的,因此需要對電機(jī)進(jìn)行控制以此來保持小車平衡的姿勢,由車身整體協(xié)調(diào)機(jī)構(gòu)轉(zhuǎn)動電動車的平衡的控制和馬達(dá)、驅(qū)動輪子、傳感器、軟件,微處理器是多種功能的控制,控制信號由動態(tài)方向決定,執(zhí)行和行為控制是一個具有綜合復(fù)雜特點(diǎn)的非線性系統(tǒng),很難得到有效控制,控制算法比較靈活,具有挑戰(zhàn)性,因此理論研究價值很高。
1.2 本文的研究內(nèi)容
有很多種方法可以使自平衡小車平衡,而本文主要研究兩種方法,其一是PID控制算法, PID調(diào)節(jié)器又稱為PID控制器[1],主要是獲得自平衡小車的姿態(tài)信號作為電機(jī)的輸出信號,同時對自平衡小車電機(jī)的運(yùn)動速度進(jìn)行有效控制,使得小車保持平衡狀態(tài)。另一種算法是卡爾曼濾波算法,為了得到小車姿態(tài)準(zhǔn)確穩(wěn)定的信息,姿態(tài)檢測算法主要通過對互補(bǔ)濾波融合姿態(tài)傳感器(陀螺儀傳感器以及加速度傳感器)數(shù)據(jù)和卡爾曼濾波器和相結(jié)合計(jì)算相應(yīng)平衡的參數(shù)[2]。
2 自平衡小車自平衡設(shè)計(jì)原理
2.1 自平衡小車直立控制
圖1是單擺的受力分析,能夠分析出普通單擺由不平衡位置恢復(fù)到平衡位置的原理。
當(dāng)單擺離開平衡位置之后,就會受到重力以及拉線的作用力,使物體向平衡的位置移動,最后回到平衡位置點(diǎn)。
2.2 平衡車的機(jī)械結(jié)構(gòu)
小車使用圖2的結(jié)構(gòu)制作研究,車體分為電池、主控制和電機(jī)驅(qū)動、姿態(tài)信號檢測兩層,電池層用于放置給驅(qū)動電機(jī)供電的12V6A聚合物鋰電池,采用由TI公司的MSP430F149芯片組成的開發(fā)電路板構(gòu)成,電機(jī)驅(qū)動層的電機(jī)驅(qū)動模塊采用L298N,姿態(tài)檢測是由MPU6050芯片組成的GY-521模塊[3]。
2.3 兩輪車傾倒的受力分析
兩輪車本身是極不穩(wěn)定的,顯然如果沒有外力作用在車身,那么小車一定會發(fā)生傾倒的現(xiàn)象。其受力分析如圖3所示。
在理想情況下,如果此時車身重力M的方向與車輪支持力H的方向之差相反時,系統(tǒng)合力為0,因此系統(tǒng)達(dá)到穩(wěn)定狀態(tài),θ角度很小,可以忽略不計(jì)。在現(xiàn)實(shí)情況下是由很多的干擾,θ的角度不是一直為0,只要θ角有一定的值,即使很小的角度值,M的方向與H的方向亦產(chǎn)生了角度,合力就不為0,根據(jù)牛頓運(yùn)動定律可知,由于質(zhì)量的原因θ角度越來越大,直至車身倒在地上[4]。
2.4 自平衡小車傾角的測量
六軸陀螺儀可以對當(dāng)前的角度信號、加速度信號數(shù)據(jù)進(jìn)行采集,采用積分的方式對角速度數(shù)據(jù)進(jìn)行分析、處理,處理器在程序中通過運(yùn)算可以得到相應(yīng)的角度值[5]。因?yàn)橥勇輧x自身采集數(shù)據(jù)比較靈敏,根據(jù)陀螺儀的時鐘每秒可以采集很多組數(shù)據(jù),因此很容易受到周圍環(huán)境噪聲的干擾,所以對微型機(jī)械陀螺儀的操作要注意不能產(chǎn)生較大的噪聲,保證微型陀螺儀可以安全地工作。陀螺儀在一定的情況下會產(chǎn)生誤差,不能單獨(dú)采用陀螺儀來當(dāng)作角度的測量的器件,所以,另外再利用加速度傳感器和三軸角度姿態(tài)傳感器共同完成姿態(tài)信號數(shù)據(jù)的檢測。
對于車模傾角和傾角加速度的測量過程中難免出現(xiàn)一些問題,而這些問題增加了感測器的漂移以及設(shè)定給予所帶來的影響,所以就選擇了MPU-6050。
MPU-6050是一款具有著高性能的三軸加速度+三軸陀螺儀的六軸傳感器模塊,基本引腳圖如圖4所示。加速度模擬信號,如圖5所示。
測量陀螺儀與加速度計(jì),能夠有效的將陀螺儀信號與加速度計(jì)的測量值相融合以此來得到較為準(zhǔn)確的傾角值。通過卡爾曼濾波的相應(yīng)的計(jì)算,就能使電機(jī)轉(zhuǎn)速得到控制,從而控制自平衡小車的平衡狀態(tài)。
3 自平衡小車硬件電路的設(shè)計(jì)
3.1 MSP430F149單片機(jī)最小系統(tǒng)
本系統(tǒng)的主控制芯片采用的是16位總線的FLASH 的MSP430單片機(jī),它的性價比高,集成度也高于一般類型的單片機(jī),在市場得到中廣泛使用。具有可靠性能好、運(yùn)算速度快、工作穩(wěn)定的優(yōu)點(diǎn)。因此,可以用來做一些較為復(fù)雜的控制系統(tǒng)。自平衡小車單片機(jī)的最小系統(tǒng)電路如圖6所示[6]。
F149單片機(jī)中運(yùn)用到:
電機(jī)轉(zhuǎn)速脈沖接口:
TA1-(PIN17);
電機(jī)PWM驅(qū)動接口:
PWM(PIN12,13):電機(jī)驅(qū)動PWM脈沖信號。
電機(jī)轉(zhuǎn)動方向控制:
IN1(P60);
IN2(P61);
IN3(P62);
IN4(P63);
程序下載接口:
P1.1(PIN13);
TCK(PIN56);
REST(PIN57);
P2.2(PIN22)。
串口監(jiān)控接口:
UTXT0(PIN32);
URXT0(PIN33)。
MPU6050模塊接口
SDA(PIN51);
SCL(PIN50)。
3.2 電機(jī)驅(qū)動電路
上圖7是由自平衡小車電機(jī)的驅(qū)動電路。因?yàn)長298N的輸入信號電壓和供電電壓是+5V,MSP430F149單片機(jī)可以直接為L298N提供輸入信號。然而,+5V的電壓不適合本車模,使該車模不能有一個很好的調(diào)速范圍。自平衡小車的電路供電電壓,不能是單一的+5V,還需要有足夠大的啟動電流的電源,才能讓小車有動力保持車身的平衡。聚合物鋰電池是比較合適的動力電源[7]。
為了讓小車保持一定的平衡,驅(qū)動電機(jī)的PWM波形使用了定時器 A自動產(chǎn)生兩路PWM 波形輸出。可以利用資源捕獲的功能來產(chǎn)生所需要的波形,以便于很好地分析小車平衡的條件。
3.3 MPU6050電路
MPU6050芯片將系統(tǒng)中的加速傳感器和陀螺儀傳感器通過整合,可以得到一些有用的數(shù)字信號,當(dāng)前自平衡小車的狀態(tài)位置信息由MSP430控制器通過一定的方式讀出,如IIC的通信方式的特點(diǎn)就比較符合[8]。所以,該芯片適合本系統(tǒng)的模塊電路,設(shè)計(jì)起來相對比較簡單。該模塊的電路連接如圖8所示。
3.4 供電電源電路
因?yàn)樽云胶庑≤嚨目刂葡到y(tǒng)電路是需要+5V的電源,而電機(jī)需要大電流電源+12V電源供電才能使電機(jī)有足夠的爆發(fā)力轉(zhuǎn)動達(dá)到平衡,因此,需要采用兩路電源。本系統(tǒng)的控制器電源由3節(jié)5號電池提供,電機(jī)驅(qū)動電壓是采用的12V/6A電流6800MA聚合物鋰電池提供,這樣才能達(dá)到小車啟動時需要大電流的要求。
4 自平衡小車軟件設(shè)計(jì)
4.1 系統(tǒng)程序結(jié)構(gòu)分析
如圖9所示,如果要使自平衡小車保持平衡,需要多個子程序,同時也能夠更好的優(yōu)化程序,子程序可以是PID調(diào)節(jié)程序、IIC通信程序、卡爾曼濾波程序、PWM波形產(chǎn)生程序和車輪轉(zhuǎn)速檢測程序等[9]。
主程序的運(yùn)行流程圖相對比較簡單,如圖10是所示,程序的核心是調(diào)用卡爾曼濾波子程序和PID控制子程序,這兩個子程序包含的內(nèi)容豐富,下面分別對這兩個主要的子程序進(jìn)行詳細(xì)的理解。卡爾曼濾波子程序的任務(wù)是將MPU6050檢測到的信號濾波,但是由于外界干擾較大,直立穩(wěn)定的小車不斷地向車輪前后方向傾斜。此時,MSP430F149單片機(jī)通過通訊協(xié)議,將MPU6050中小車擺動的角速度和水平方向上的加速度讀取出來,再對其加工處理。卡爾曼濾波器通過一定的測量方法可以得到很準(zhǔn)確的傾角值。PID子程序主要是得到的傾角使控制器輸出相應(yīng)的占空比波形來使電機(jī)的運(yùn)轉(zhuǎn)得到有效控制,由卡爾曼濾波器輸出的角度來調(diào)整電機(jī)相應(yīng)的運(yùn)轉(zhuǎn)方向,以此使小車保持平衡。
4.2 卡爾曼融合程序
卡爾曼融合的子程序的流程圖如下圖11所示,圖中讀取Y軸加速也就是F149通過I2C來控制MPU6050并傳輸MPU6050所檢測的加速度、角速度兩個數(shù)據(jù)。卡爾曼濾波器則是將這兩個數(shù)據(jù)進(jìn)行濾波、融合得到小車的傾角。
子程序如下:
void Angle_Calcu(void)
{
//------加速度--------------------------
//換算關(guān)系:16384 LSB/g
//角度較小時,? ?x=sinx得到角度(弧度),? ? deg = rad*180/3.14
//因?yàn)? x>=sinx,? 故乘以 1.2 適當(dāng)放大
Accel_x? = GetData(ACCEL_YOUT_H);? ? ?//讀取Y軸加速度
Angle_ax? = (Accel_x - 1100) /16384;? ? ? //去除零點(diǎn)偏移,計(jì)算得到角度(弧度)
Angle_ax? = Angle_ax*1.2*180/3.14;? ? ?//弧度轉(zhuǎn)換為度,
//-------角速度-------------------------
Gyro_y? = GetData(GYRO_YOUT_H);//
Gyro_y? = -(Gyro_y + 30)/16.4;? ? ? ?//計(jì)算角速度值,? ?負(fù)號為反方向
//-------卡爾曼濾波融合-----------------------
Kalman_Filter(Angle_ax,Gyro_y);? ? //卡爾曼濾波計(jì)算傾角
}
(程序1? 卡爾曼濾波融合子程序)
4.2.1 IIC通信程序
IIC串行通信總線。IIC總線通過串行數(shù)據(jù)線SDA和串行時鐘線SCL兩根線將多個具有IIC總線接口的器件接到總線上,可以發(fā)送和接收數(shù)據(jù)。ICC總線分為三種類型的信號傳輸,分別是開始信號、結(jié)束信號和應(yīng)答信號[10]。
本系統(tǒng)的IIC通信是單向通訊,該系統(tǒng)的MSP430為主控制器件,同時也是單向接收端,而MPU6050為發(fā)送端的形式進(jìn)行通訊。
因此,由單片機(jī)P5.0(SCL)、P5.1(SDA)模擬實(shí)現(xiàn)IIC通信程序的流程圖如上圖12所示[11]。
4.2.2 卡爾曼濾波器
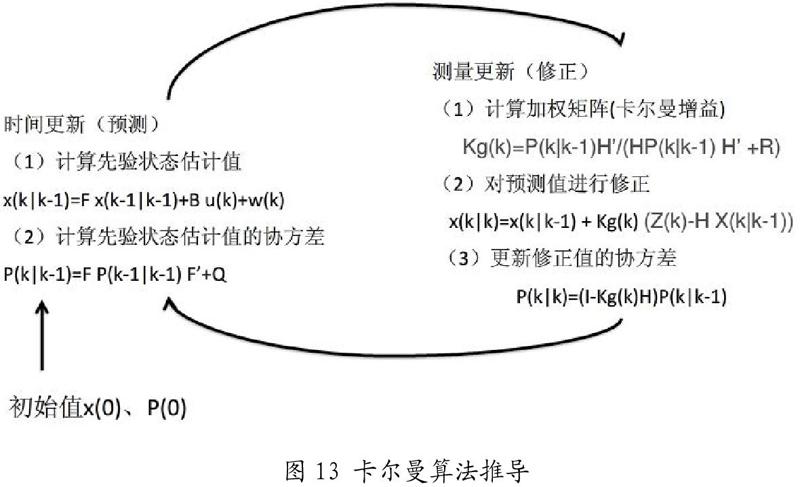
斯坦利·施密特(Stanley Schmidt)開創(chuàng)卡爾曼濾波這一先河,首次實(shí)現(xiàn)了這一濾波方式,阿波羅飛船導(dǎo)航器為飛船提供了有效可靠的導(dǎo)航數(shù)據(jù)。卡爾曼濾波器的實(shí)質(zhì)就是利用遞推估算法總結(jié)之前數(shù)據(jù)的干擾,它同時利用小均方誤差的結(jié)合,對前一時刻的估算值和此時刻的測量值來估算下一時刻的值,以此類推,相互影響。這種方法具有效率高的特點(diǎn),可以解決現(xiàn)實(shí)中的很多問題,有效減少誤差,使采集回的信號更加平穩(wěn)、有效。在工業(yè)控制、通信系統(tǒng)、電力系統(tǒng)、環(huán)境污染控制、生活家電、航空航天、軍事設(shè)施設(shè)備星號處理等很多地方都得到了廣泛的應(yīng)用[12]。在圖像處理方面,也可以利用卡爾曼濾波處理對模糊的圖像進(jìn)行還原,是圖像顏色分界處變得更細(xì)膩、更緩線性的變色。卡爾曼算法如下圖13所示:
//******卡爾曼參數(shù)************
float Q_angle=0.002;
float Q_gyro=0.01;
float R_angle=0.003;
float dt=0.008;//dt為kalman濾波器采樣時間;
char? C_0 = 1;
float Q_bias, Angle_err;
float PCt_0, PCt_1, E;
float K_0, K_1, t_0, t_1;
float Pdot[4] ={0,0,0,0};
float PP[2][2] = { { 1, 0 },{ 0, 1 } };
//*********************************************************
// 卡爾曼濾波
//*********************************************************
void Kalman_Filter(float Accel,float Gyro)
{
Angle+=(Gyro - Q_bias) * dt; //先驗(yàn)估計(jì)
Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; // Pk-先驗(yàn)估計(jì)誤差協(xié)方差的微分
Pdot[1]=- PP[1][1];
Pdot[2]=- PP[1][1];
Pdot[3]=Q_gyro;
PP[0][0] += Pdot[0] * dt;? ?// Pk-先驗(yàn)估計(jì)誤差協(xié)方差微分的積分
PP[0][1] += Pdot[1] * dt;? ?// =先驗(yàn)估計(jì)誤差協(xié)方差
PP[1][0] += Pdot[2] * dt;
PP[1][1] += Pdot[3] * dt;
Angle_err = Accel - Angle;//zk-先驗(yàn)估計(jì)
PCt_0 = C_0 * PP[0][0];
PCt_1 = C_0 * PP[1][0];
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0;
t_1 = C_0 * PP[0][1];
PP[0][0] -= K_0 * t_0; //后驗(yàn)估計(jì)誤差協(xié)方差
PP[0][1] -= K_0 * t_1;
PP[1][0] -= K_1 * t_0;
PP[1][1] -= K_1 * t_1;
Angle+= K_0 * Angle_err; //? 后驗(yàn)估計(jì)
Q_bias+= K_1 * Angle_err; //? 后驗(yàn)估計(jì)
Gyro_y? = Gyro - Q_bias; //? 輸出值? (后驗(yàn)估計(jì))的微分=角速度
}
(程序2? 卡爾曼濾波子程序)
程序2是卡爾曼濾波的子程序,它是依據(jù)圖13的推導(dǎo)原理來編寫的。它的算法是屬于一種遞推算法。卡爾曼濾波采用一定的變量可以反映出系統(tǒng)的狀態(tài)特征。它的模型有兩種,一種是狀態(tài)空間模型,該模型反映的是系統(tǒng)運(yùn)動的規(guī)律;而另一種模型,觀測模型則是反映系統(tǒng)觀測值與狀態(tài)變量之間的關(guān)系[13]。這樣程序就可以自動預(yù)判下一時刻的狀態(tài),就可以更快的讓系統(tǒng)穩(wěn)定。
當(dāng)加速度和角速度信號經(jīng)過卡爾曼濾波器,就可以得到一個相對精確、穩(wěn)定的角度信號。
4.3 計(jì)數(shù)程序設(shè)計(jì)
本系統(tǒng)是采用選擇的F149ACLK為定時器 A時鐘源, 增計(jì)數(shù)模式來測得自平衡小車當(dāng)前速度的。自平衡小車的速度需要計(jì)算,此過程需要借助于轉(zhuǎn)速中斷程序。對于自平衡小車速度的測量需要用到兩個中斷子程序。當(dāng)其中一個中斷子程序獲得“允許測量”信號的時候,開始執(zhí)行檢測中斷的任務(wù),當(dāng)檢測到旋轉(zhuǎn)編碼器脈沖時,進(jìn)入另外一個中斷子程序,開始計(jì)數(shù),為了保證計(jì)數(shù)的同時不被外界信號所干擾,需要控制系統(tǒng)暫停檢測中斷的任務(wù),同時打開時間計(jì)數(shù)器[14]。當(dāng)時間計(jì)數(shù)器達(dá)到計(jì)數(shù)值時,就會發(fā)出不再計(jì)數(shù)的信號,接到此信號的中斷子程序又開始檢測中斷,以此循環(huán),直至認(rèn)為控制關(guān)閉。具體程序如下所示:
void jishuqi()
{
P5DIR |= 0x05; //設(shè)輸出端口
CCTL0 = CCIE; //CCR0開中斷允許
CCR0 = 521-1; //向CCR0捕獲/比較寄存器裝入初值,用于比較
TACTL = TASSEL_2 + MC_1; //選 ACLK為定時器 A時鐘源, 增計(jì)數(shù)模
}
// Timer A2中斷服務(wù)程序
#pragma vector=TIMERA0_VECTOR
__interrupt void Timer_A (void)
{
ave_diff1=TACCR1;
}
(程序3? 小車車輪轉(zhuǎn)速檢測子程序)
4.4 PID調(diào)節(jié)器程序設(shè)計(jì)
采用PID調(diào)節(jié)器對系統(tǒng)響應(yīng)進(jìn)行調(diào)節(jié),PID調(diào)節(jié)又叫PID控制,閉環(huán)自動控制可以增加調(diào)節(jié)的精度。在基于自動控制正負(fù)反饋的原理之上,測量系統(tǒng)的實(shí)際值與測量值相兩者之差,實(shí)現(xiàn)調(diào)節(jié)控制系統(tǒng)的相應(yīng)誤差[15]。本設(shè)計(jì)將采用比例、積分,微分來控制小車電機(jī)轉(zhuǎn)動方向的速度。
為了保證系統(tǒng)的安全,需要對控制器的輸出值進(jìn)行適當(dāng)?shù)南拗疲欢鴮τ跀?shù)控來說,對輸出值進(jìn)行適當(dāng)?shù)南拗疲词且獙(k)進(jìn)行限制,設(shè)置一個限制值u(m),根據(jù)需要設(shè)定u(k)與u(m)的關(guān)系,對于這種情況還需要對u(k)的積分設(shè)置相應(yīng)的限制值,以此來保護(hù)系統(tǒng)響應(yīng)不受外來信息的干擾。具體的控制程序流程圖如下:
float PWM,? PWM_L,? PWM_R;
float Kp = 41, Ki = 11.3, Kd = 3.6;
float err,? ?speed_need = 0,turn_need = 0; //speed_need = 300,turn_need = 20
float position_dot,? position_dot_filter? ;
void PID (float setPoint)
{
jishuqi();
position_dot = ave_diff1*0.5;//編碼器值讀出
position_dot_filter*=? ?0.85;
position_dot_filter +=? ?position_dot*0.15;
if(Angle<-35 || Angle>35)? //角度過大,關(guān)閉電機(jī)
{
P6OUT = 0X00;
return;
}
err = Angle - setPoint;//得到實(shí)際偏差角度
PWM = - err*Kp
- Gyro_y*Ki
+ position_dot_filter*Kd ;
motorspeedout(PWM);? ?//電機(jī)輸出
}
(程序4? PID控制程序)
5 總結(jié)
一般將車模分為平衡、行走和方向三個部分進(jìn)行控制,三項(xiàng)任務(wù)相互耦合,互相作用最終都會達(dá)到平衡,本次研究主要是在小車平衡的算法,小車平衡主要是控制好小車輪子的正轉(zhuǎn)、反轉(zhuǎn)和速度來保持小車的平衡,在控制平衡過程中,由于不穩(wěn)定的車身,需要穩(wěn)定,所以要求控制信號必須平滑且高效,所以這里主要運(yùn)用了PID算法和卡爾曼濾波等算法能夠?qū)崿F(xiàn)這一要求[16],利用濾波后的平滑數(shù)據(jù)控制PWM穩(wěn)定、有效的控制自平衡小車自身車輪,使其保持相對平衡,這是一個實(shí)時動態(tài)平衡的過程。系統(tǒng)不斷的檢測整合三軸角速度、三軸加速度、上一時刻姿態(tài)數(shù)據(jù)、預(yù)估影響值、車輪的轉(zhuǎn)速等數(shù)據(jù)進(jìn)行整理、融合不斷控制PWM輸出信號形成閉環(huán)控制系統(tǒng),不斷地使三軸陀螺儀檢測的數(shù)據(jù)達(dá)到預(yù)設(shè)的值,也就是相對的平衡狀態(tài)。
參考文獻(xiàn):
[1] 張軒,徐苗,鄭德聰,李志偉.基于變論域模糊PID控制的BLDCM仿真分析[J].微特電機(jī),2020,48(03):54-57.
[2] 黃文杰,向鳳紅.一種基于卡爾曼濾波的板球系統(tǒng)RBF-PID控制研究[J].電子測量技術(shù),2020,43(02):91-96.
[3] 徐猛.基于STM32自平衡小車的設(shè)計(jì)與制作[J].計(jì)算機(jī)產(chǎn)品與流通,2019(09):110.
[4] 李詳鵬,陳春,周子文,施娜,孫雅琪,楊陽.基于ME MS傳感器的兩輪平衡小車設(shè)計(jì)[J].科技創(chuàng)新與應(yīng)用,2019 (22):27-29.
[5] 馮智勇,曾瀚,張力.基于陀螺儀及加速度計(jì)信號融合的姿態(tài)角度測量[J].西南大學(xué),2011(04):137-141.
[6] 桑勝舉,沈丁.單片機(jī)原理及應(yīng)用[M].北京:中國鐵道出版社,2010.
[7] 鄧怡佳,李昆侖.基于STC單片機(jī)的自平衡小車設(shè)計(jì)[J].電子測試,2019(11):33-34,29.
[8] 李瑞通. 基于陀螺儀技術(shù)的管線三維可視化研究[D].太原理工大學(xué),2019.
[9] 何軍虎,鞠劍平.自平衡車控制方法研究及仿真分析[J].機(jī)械設(shè)計(jì)與制造,2019(07):144-146.
[10] 郝立果,鄒玉茹.無線充電智能小車的設(shè)計(jì)[J].電子制作,2019(23):34-36.
[11] 林浩.MSP430單片機(jī)Timer_A的應(yīng)用[J].信息記錄材料,2019,20(12):84-85.
[12] 黃強(qiáng),唐杰,林立,劉興,張英洪.三相PWM整流器的雙閉環(huán)前饋解耦控制研究[J].邵陽學(xué)院學(xué)報(自然科學(xué)版),2020,17(01):40-47.
[13] 孫永忠,姜毅龍.載波移相PWM調(diào)制下的MMC電壓平衡控制策略[J].電氣傳動,2020,50(02):41-49.
[14] 孟春見,李開龍,張夢得.捷聯(lián)慣性基組合導(dǎo)航濾波算法比較研究[J].電光與控制,2020,27(02):18-21.
[15] 文常保,戚一娉,宿建斌,巨永鋒.基于新型卡爾曼濾波算法的稱重系統(tǒng)實(shí)現(xiàn)研究[J].自動化與儀表,2020,35(02): 52-56.
[16] 李慧敏,于興林.基于穩(wěn)定圖算法的發(fā)電機(jī)轉(zhuǎn)動慣量參數(shù)辨識[J].電氣自動化,2019(05):8-11.
彭水苗族土家族自治縣職業(yè)教育中心,重慶
