基于圖像識別的激光光路自動(dòng)調(diào)節(jié)系統(tǒng)設(shè)計(jì)
2020-03-16 02:31:36武劍
電子技術(shù)與軟件工程 2020年24期
武劍
(天津核工業(yè)理化工程研究院激光技術(shù)研究所 天津市 300171)
1 引言
激光光路在長距離傳輸試驗(yàn)中,會因氣流擾動(dòng)、光學(xué)平臺震動(dòng)以及反射裝置鏡架熱變形等原因發(fā)生抖動(dòng)或漂移[1]。隨著光路傳輸系統(tǒng)的工程化應(yīng)用,研究激光光路的自動(dòng)調(diào)節(jié)技術(shù)是十分必要的。本文基于圖像識別技術(shù)針對激光光路傳輸過程設(shè)計(jì)了一個(gè)自動(dòng)調(diào)節(jié)系統(tǒng),在激光光路出現(xiàn)偏移或其它異常情況時(shí)可以實(shí)時(shí)對光路進(jìn)行閉環(huán)調(diào)節(jié),實(shí)現(xiàn)光路動(dòng)態(tài)穩(wěn)定。
2 系統(tǒng)設(shè)計(jì)原理
由陣列反射鏡組成的激光光路調(diào)節(jié)裝置工作示意圖如圖1 所示,激光自下而上在鏡像安裝的陣列鏡片間依次反射形成傳輸光路,每個(gè)鏡片均由其背后的兩臺步進(jìn)電機(jī)控制水平和俯仰角度。

圖1:陣列反射鏡調(diào)節(jié)裝置工作示意圖
光路自動(dòng)調(diào)節(jié)系統(tǒng)的基本原理是通過攝像機(jī)對多陣列反射鏡的整體圖像進(jìn)行拍攝采集,得到反射鏡面上的光斑圖像。使用現(xiàn)場計(jì)算機(jī)對采集到的光斑圖像進(jìn)行識別處理分析,獲得反射鏡片中心坐標(biāo)及激光光斑中心坐標(biāo),其差值即為激光光斑的實(shí)際位置與目標(biāo)位置之間的偏差,將其作為光路自動(dòng)調(diào)節(jié)的反饋控制信號,以此計(jì)算出控制鏡片角度的電機(jī)的行進(jìn)步長,最后驅(qū)動(dòng)相應(yīng)步進(jìn)電機(jī)運(yùn)行,實(shí)現(xiàn)光路調(diào)節(jié)目的。
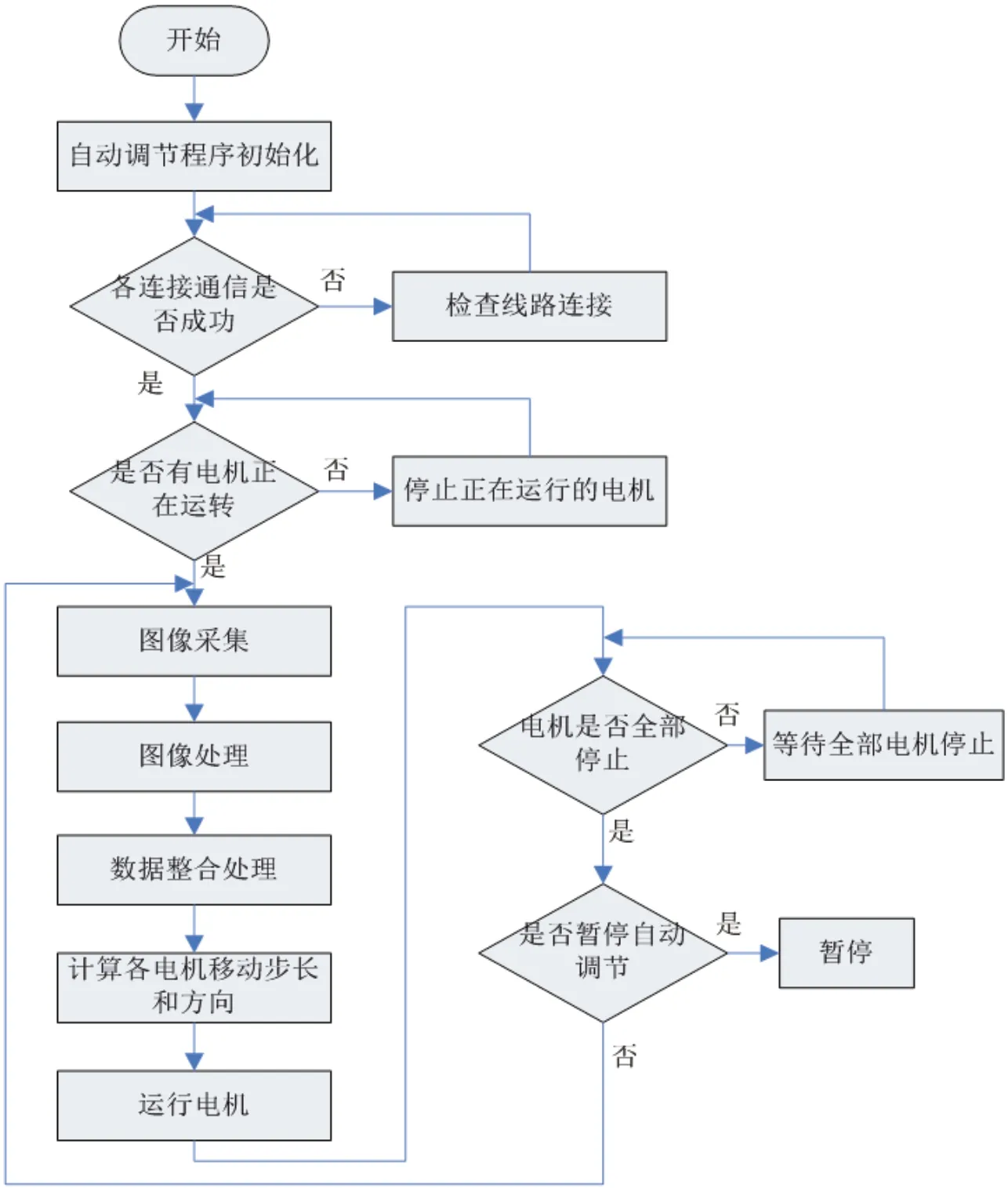
圖2:光路閉環(huán)控制系統(tǒng)流程圖
3 硬件設(shè)計(jì)
光路自動(dòng)調(diào)節(jié)系統(tǒng)的硬件部分主要由兩個(gè)攝像頭、一臺工控機(jī)和兩個(gè)步進(jìn)電機(jī)驅(qū)動(dòng)箱組成。
攝像頭作為圖像采集單元,要求能夠在實(shí)際工作中采集到完整的鏡片和光斑圖像,是光斑圖像識別處理的前提條件。
工控機(jī)作為控制中樞,既負(fù)責(zé)整個(gè)控制系統(tǒng)的計(jì)算和處理,也提供光路自動(dòng)控制軟件的人機(jī)接口。
步進(jìn)電機(jī)驅(qū)動(dòng)箱是系統(tǒng)執(zhí)行機(jī)構(gòu),內(nèi)部集成有隔離穩(wěn)壓電源,通信模塊,單片機(jī)控制模塊和8 臺步進(jìn)電機(jī)驅(qū)動(dòng)器。隔離穩(wěn)壓電源的作用是給整個(gè)驅(qū)動(dòng)箱供電,同時(shí),配置了濾波器、斷路器和浪涌保護(hù)器提高控制箱的抗電磁干擾能力。步進(jìn)電機(jī)控制箱與計(jì)算機(jī)通信使用以太網(wǎng)總線形式,通信協(xié)議為ModbusTCP 協(xié)議,便于與上位機(jī)集成。單片機(jī)控制模塊用以解碼、轉(zhuǎn)碼、處理和應(yīng)答工控機(jī)指令[2]。8 臺步進(jìn)電機(jī)驅(qū)動(dòng)器為最終的執(zhí)行單元步進(jìn)電機(jī)提供驅(qū)動(dòng)電流。
4 軟件設(shè)計(jì)
4.1 設(shè)計(jì)方案
系統(tǒng)的軟件選用基于Opencv 開源函數(shù)庫的VC++平臺進(jìn)行開發(fā),其設(shè)計(jì)流程參照光路自動(dòng)調(diào)節(jié)系統(tǒng)的控制原理,分為三個(gè)步驟。首先是通過圖像試別獲得光斑的實(shí)際位置與目標(biāo)位置之間的偏差,然后是計(jì)算出步進(jìn)電機(jī)需要運(yùn)行的步長,最后是控制步進(jìn)電機(jī)運(yùn)行。光路自動(dòng)調(diào)節(jié)系統(tǒng)的核心技術(shù),一個(gè)是圖像識別算法,一個(gè)是閉環(huán)控制算法。閉環(huán)軟件在開始運(yùn)行后,需要不斷的循環(huán)執(zhí)行圖像的處理識別與電機(jī)的閉環(huán)控制程序。因此,確定軟件流程圖如圖2 所示。
4.2 圖像識別算法
圖像識別算法流程包括圖像數(shù)據(jù)導(dǎo)入、圖像二值化及濾波、鏡片中心定位、激光光斑定位和數(shù)據(jù)保存五個(gè)部分。
攝像頭采集到的原始圖像上存在大量光點(diǎn)噪聲,因此在進(jìn)行光斑圖像識別前需要對采集到的原始圖像進(jìn)行初步的降噪處理。由于激光光路的噪聲光線基本服從正態(tài)分布。因此針對本系統(tǒng),高斯濾波方法能更好的完成圖像降噪任務(wù)。
為不影響光路,采集攝像頭不可避免具有拍攝傾角,又因?yàn)槭褂玫氖瞧浇晴R頭,所以造成的圖像畸變主要是梯形失真。因此,在初步處理后的圖像上需要進(jìn)行圖像透視變換消除畸變,然后再采用Hough 直線變換[3]便可獲得鏡片的長方形輪廓擬合圖形,進(jìn)而可計(jì)算出鏡片中心位置坐標(biāo)。
接下來,在識別出的每個(gè)獨(dú)立的鏡片區(qū)域采用Canny 邊緣擬合算法確定出光斑的邊緣曲線,并通過重心法計(jì)算出激光光斑的中心位置及坐標(biāo)。圖像最終處理結(jié)果圖如圖3 所示,鏡片邊緣輪廓與光斑輪廓均已擬合完成。
最后,將激光光斑中心坐標(biāo)與鏡片中心坐標(biāo)的差值記錄在CPoint 類型的數(shù)組spot[8]里,完成圖像識別處理程序。
4.3 閉環(huán)控制算法
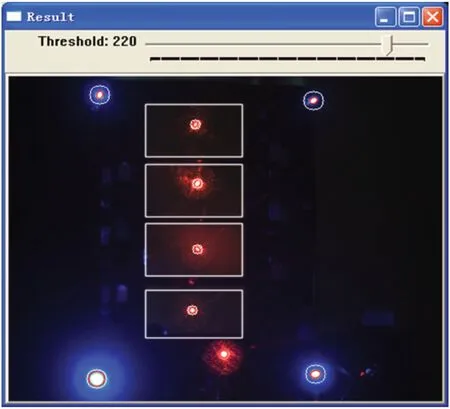
圖3:圖像處理結(jié)果圖
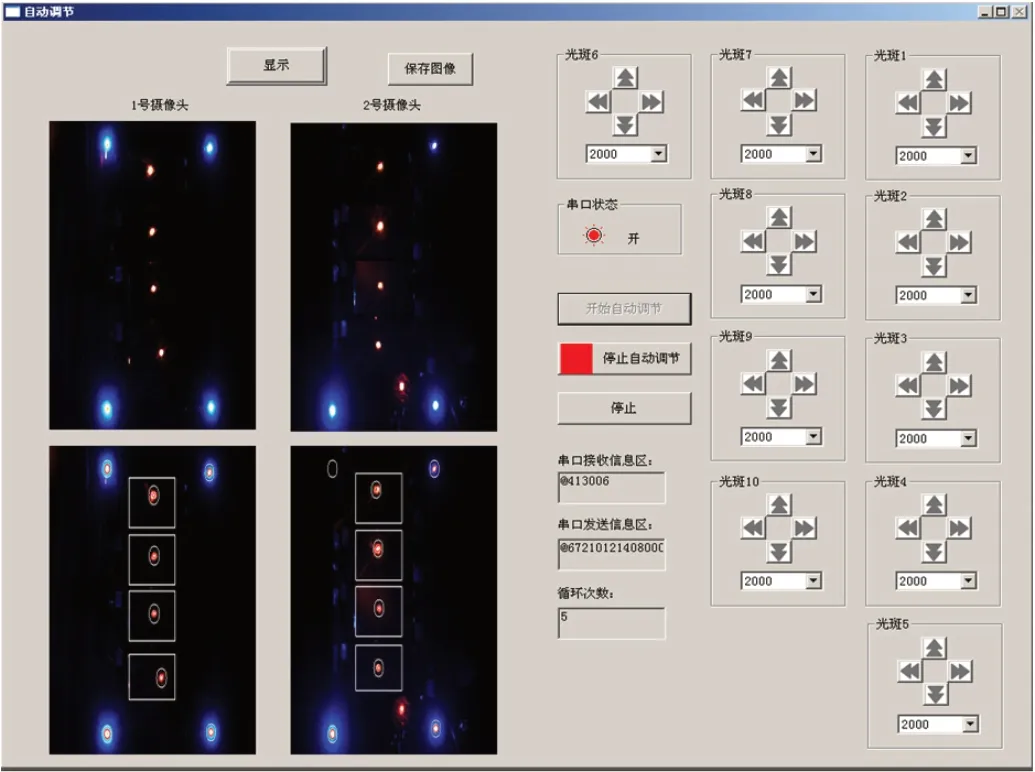
圖4:閉環(huán)調(diào)節(jié)界面
每個(gè)陣列鏡片上激光光斑中心位置的偏移是由光路傳輸通道前一鏡片的角度偏移造成的,因此要實(shí)現(xiàn)光斑的動(dòng)態(tài)穩(wěn)定,實(shí)際上是要完成前一鏡片的閉環(huán)控制。而每個(gè)反射鏡片的角度均由控制水平方向傾斜角度和垂直方向傾斜角度的兩臺步進(jìn)電機(jī)進(jìn)行控制。這里以控制水平方向的步進(jìn)電機(jī)的控制策略為例介紹閉環(huán)控制算法的原理。
如前文圖1 所示,一組陣列鏡片激光調(diào)節(jié)機(jī)構(gòu)由鏡像部署的八塊反射鏡片(自下而上分別為鏡片0 到鏡片7)組成,每塊反射鏡片均只能對傳輸光路后續(xù)光斑產(chǎn)生影響。設(shè)spot.x[]為激光光斑中心坐標(biāo)與反射鏡片中心坐標(biāo)的的偏差值即激光偏移距離,則該偏差值理論上是由光路傳輸前端所有陣列反射鏡片的偏移造成的。再設(shè)控制鏡片0 水平方向角度步進(jìn)電機(jī)移動(dòng)x0個(gè)步長,對剩余7個(gè)鏡片上光斑位置的影響系數(shù)分別為a1~a7,則激光光斑在對應(yīng)鏡片上移動(dòng)距離可分別設(shè)為a1·x0、a2·x0、a3·x0、a4·x0、a5·x0、a6·x0、a7·x0;設(shè)控制鏡片1 水平方向角度步進(jìn)電機(jī)移動(dòng)x1個(gè)步長,對剩余6 個(gè)鏡片上光斑位置的影響系數(shù)分別為b2~b7,則激光光斑在對應(yīng)鏡片上移動(dòng)距離可分別設(shè)為b2·x1、b3·x1、b4·x1、b5·x1、b6·x1、b7·x1;以此類推。可得關(guān)系方程(1):

根據(jù)激光的入射角與反射角角度相等、光路在鏡像部署的陣列反射鏡片間反射的距相等等條件可以對方程(1)的系數(shù)矩陣進(jìn)行化簡,最終得到方程(2)。

方程(2)即為光路自動(dòng)調(diào)節(jié)系統(tǒng)的閉環(huán)控制模型,在激光系統(tǒng)中,其系數(shù)a、b 為固定常數(shù),只要圖像識別程序計(jì)算出光斑偏移值spot.x[],便可根據(jù)迭代法計(jì)算出每個(gè)步進(jìn)電機(jī)需要移動(dòng)的步長和方向。
方程(2)中系數(shù)a 和b 的確定,可通過實(shí)驗(yàn)獲得。為此,本文再次利用前文的圖像識別算法設(shè)計(jì)了一個(gè)計(jì)算系數(shù)的輔助程序,其基本原理是首先計(jì)算出光路正常狀態(tài)下每個(gè)鏡片上的激光光斑的中心坐標(biāo)值,然后再按固定的光斑偏移量控制步進(jìn)電機(jī)運(yùn)行,然后再次計(jì)算出光路偏移狀態(tài)下每個(gè)鏡片上的激光光斑的中心坐標(biāo)值。這樣便確定了spot.x[]和x 的值,解方程(2),便可獲得閉環(huán)控制模型電機(jī)對光斑的影響系數(shù)a 和b 的值。
這套閉環(huán)控制模型將圖像處理后激光光斑中心位置與鏡片中心位置的偏差值轉(zhuǎn)換為對應(yīng)步進(jìn)電機(jī)需要運(yùn)行的步長值,實(shí)現(xiàn)了閉環(huán)控制策略。經(jīng)實(shí)驗(yàn)測試,其控制精度滿足激光光路控制要求。
5 實(shí)驗(yàn)驗(yàn)證
圖4 所示的是光路自動(dòng)調(diào)節(jié)系統(tǒng)的軟件界面,左側(cè)區(qū)域?yàn)椴杉瘓D像顯示區(qū)域,右側(cè)為電機(jī)控制區(qū)域。自動(dòng)調(diào)節(jié)實(shí)驗(yàn)中,系統(tǒng)一直在循環(huán)監(jiān)測和自動(dòng)調(diào)節(jié)光斑位置,保持光路動(dòng)態(tài)穩(wěn)定。
6 結(jié)束語
本文設(shè)計(jì)的激光光路自動(dòng)調(diào)節(jié)系統(tǒng)所采用的圖像識別算法和閉環(huán)控制算法,可以在激光光路發(fā)生偏移的情況下,精確計(jì)算出陣列鏡片上光斑的偏移量,并可計(jì)算出控制每塊反射鏡片的步進(jìn)電機(jī)需要運(yùn)行的步長,自動(dòng)將光路調(diào)節(jié)回目標(biāo)光路,從而維持光路的動(dòng)態(tài)穩(wěn)定,為激光光路傳輸系統(tǒng)的工程化應(yīng)用創(chuàng)造條件。
本文所采用的圖像識別技術(shù),目前僅應(yīng)用在目標(biāo)光斑的位置計(jì)算中,在下一步工作中,可對攝像頭采集到的光斑圖像進(jìn)行進(jìn)一步的處理和研究,比如對激光光斑的能量分布和光束整形質(zhì)量進(jìn)行識別與判斷,從而為光路傳輸系統(tǒng)的前端和后端系統(tǒng)提供更多的技術(shù)支持。

- 電子技術(shù)與軟件工程的其它文章
- 大數(shù)據(jù)時(shí)代的信息安全等級保護(hù)
- 局域網(wǎng)環(huán)境下計(jì)算機(jī)網(wǎng)絡(luò)安全防護(hù)技術(shù)應(yīng)用
- 大數(shù)據(jù)云計(jì)算下網(wǎng)絡(luò)安全技術(shù)實(shí)現(xiàn)的途徑
- 云計(jì)算高校數(shù)據(jù)中心建設(shè)及安全性研究
- 基于虛擬現(xiàn)實(shí)技術(shù)的網(wǎng)絡(luò)安全游戲交互設(shè)計(jì)
- 縣域電網(wǎng)運(yùn)行方式風(fēng)險(xiǎn)評估及策略