基于GPN徑向基神經網絡的邊緣檢測方法①
2020-03-18 07:55:02楊晟院鐘雅瑾
計算機系統應用 2020年3期
劉 洋,楊晟院,鐘雅瑾
1(湘潭大學 信息工程學院,湘潭 411105)
2(湖南軟件職業學院 軟件與信息工程學院,湘潭 411100)
圖像邊緣檢測在圖像處理[1,2],計算機視覺[3-6]等領域發揮著至關重要的作用.圖像邊緣檢測的結果直接影響圖像分析、理解和識別的效果[7].
目前邊緣檢測算法已經較為豐富,通過與新理論的不斷結合,大致可以分為基于梯度的邊緣檢測算法[8]、基于數學形態的邊緣檢測算法[9]、基于小波變換的邊緣檢測算法[10]、基于神經網絡的邊緣檢測算法[11]、基于遺傳算法的邊緣檢測算法等.本文主要研究的是基于神經網絡的邊緣檢測算法.
基于神經網絡的邊緣檢測算法一直是研究的熱點.它從信息處理角度對人腦神經元網絡進行抽象,建立某種簡單模型,按不同的連接方式組成不同的網絡.早期有Paik JK 等[12]利用分層神經網絡的旋轉不變性,最終得到圖像邊緣.Barrios V 等[13]通過具有反向傳播訓練算法的多層感知器神經網絡進行癌癥細胞組織圖像中的邊緣檢測和追蹤.Aizenberg IN 等[14]使用具有通用二進制神經元的卷積神經網絡(CNN)來處理灰度圖像上的邊緣檢測問題.但這類構造方法將會導致模型較為復雜,效率較低.隨著對神經網絡研究的不斷深入,出現了大量的基于神經網絡的邊緣檢測算法[15-19].例如,Ling H 等[15]通過非下采樣Contourlet 變換(NSCT)將圖像分解為高頻定向子帶系數和低頻子帶系數,其中低頻子帶系數用于通過脈沖耦合神經網絡(PCNN)檢測圖像邊緣的基本輪廓線,最后利用NSCT 域中不同尺度和不同方向子帶檢測到的邊緣信息重建得到邊緣檢測圖像.該方法在檢測結果上優于部分先進的圖像邊緣檢測方法,但PCNN 模型相對其他神經網絡龐大的參數群以及參數的設置方法都影響了模型的執行效率和檢測結果.Wang W 等[17]提出了基于細胞神經網絡(CNN)和分布式遺傳算法(DGA)相結合的邊緣檢測算法,CNN 模板使用分布式遺傳算法訓練網絡.該模型可精確提取紅外圖像邊緣,大大提高參數的搜索范圍和收斂速度.但由于編碼染色體和評價函數選擇的困難,將會導致對部分圖像的檢測效果不是很好,且尋求最優解的過程所需時間過長.Chou Y 等[19]提出了一種改進的基于CNN 的神經網絡用來進行邊緣檢測的方法,該方法實現了精確的邊緣檢測,但基于CNN 的邊緣檢測方法依賴于分類網絡,而分類方法很慢,所以導致檢測時間較長.
針對傳統的基于神經網絡的邊緣檢測算法檢測效率不高以及檢測效果不理想等問題,本文根據人眼視覺系統的結構和行為特性,提出了一種全新的用于邊緣檢測的徑向基神經網絡模型.將高斯濾波后的圖像中的每個像素點輸入該模型,加強圖像輪廓,增強了對弱邊緣的提取能力.神經網絡每層之間使用了卷積神經網絡中權值共享和稀疏連接的特性從而減少了自由參數,降低了網絡的復雜性.最后利用輪廓跟蹤的方法快速地將目標輪廓檢測出來.
1 相關工作
1.1 卷積神經網絡(CNN)
CNN[20]是一個多層的神經網絡,每層由多個二維平面組成,而每個平面由多個獨立神經元組成,見圖1.

圖1 CNN 結構圖
在圖1 中,Input 表示輸入層;C-表示卷積層,每個神經元的輸入與前一層的局部感受野相連,并提取該局部的特征,一旦該局部特征被提取后,它與其他特征之間的位置關系也隨之確定下來;S-層不是指具體的某一層,而是指輸入層和特征映射層、特征映射層和特征映射層之間的計算過程,而特征映射層則保持的是卷積、下采樣和局部平均的輸出結果.網絡的每個計算層由多個特征映射組成,每個特征映射為一個平面,平面上所有神經元的權值相等.特征映射結構采用影響函數核小的Sigmoid 函數作為卷積網絡的激活函數,使得特征映射具有位移不變性.
由于一個映射面上的神經元共享權值,因而減少了網絡自由參數的個數,降低了網絡參數選擇的復雜度.
1.2 徑向基神經網絡(RBFNN)
RBFNN[21]是一種單隱層前饋神經網絡.它使用徑向基函數作為隱層神經元激活函數,而輸出層則是對隱層神經元輸出的線性組合,如圖2 所示.

圖2 RBFNN 結構圖
在圖2 中,輸入層由輸入的數據組成.第二層為隱層,隱單元數由所描述問題的需要而定,隱單元的變換函數是徑向基函數,它是對中心點徑向對稱且衰減的非負非線性函數.第三層為輸出層,它對輸入模式的作用做出相應.
通常采用兩步過程來訓練RBFNN:第1 步,確定神經元中心,常用的方式包括隨機采樣、聚類等;第2 步,利用訓練算法等來確定參數.RBFNN 的激活函數可以采取多種形式,常見的有:Gaussian 函數、Reflected sigmoidal 函數、Inverse multiquadrics 函數.目前最為廣泛的是采用Gaussian 函數作為激活函數,方程如下:其中t是兩個特征向量之間的歐幾里得距離,δ是徑向基函數的擴展常數,它反應了函數圖像的寬度,δ越小,寬度越窄,函數越具有選擇性.因為徑向基核函數的值隨距離減小,并介于0(極限)和1(當采樣點位于中心時)之間,所以它是一種現成的相似性度量表示法.
本文根據人眼視覺系統以及RBFNN 的網絡結構構造出一種新的基于GPN 徑向基神經網絡的邊緣檢測模型,并利用CNN 的部分特性簡化了該網絡模型.
2 GPN 徑向基神經網絡
2.1 理論分析
根據人眼視覺特性的馬赫效應[22],我們提出了兩點假設:
(1)人眼在識別圖像時會將每一個像素點與其周圍的點做距離的加權比較;
(2)人眼在對某個像素點做比較時,對周圍的點比中心點像素值高還是低會給出一個比較直觀的判斷.
根據假設(1)我們提出表達式:

根據假設(2)我們提出表達式:

其中,D表示整個圖像域,D1表示像素點x與其領域差值大于零的區域,D2表示像素點x與其領域差值小于零的區域,I(·)表示該點的像素值,K(·)是高斯核函數.Gmid表示像素點x與其鄰域的差值,GP(Gaussian Positive)和GN(Gaussian Negative)分別是像素點x與鄰域的差值為正和為負的部分.
通過上述的假設,可以根據計算出的GP和GN值進一步給出邊緣輪廓的凸顯算法,簡稱GPN(Gaussian Positive-Negative)輪廓凸顯算法.

?
從圖3 中可以看出,圖像中的每個像素點經過上述算法流程得到最終結果image1,從結果可以看出,位于輪廓區域像素點的像素值明顯高于其他區域的像素值.
2.2 GPN 神經網絡
根據GPN 輪廓凸顯算法流程,我們可以構造出一個全新的GPN 徑向基神經網絡以達到突顯輪廓的目的,如圖4 所示,第一層到第四層分別為:輸入層、展開層、隱層以及輸出層.輸入層由具有h個像素點圖像的像素點xi組 成,i=1,2,···,h,計算每個像素點與其鄰域的差值,并將結果輸入到第二層展開層;第三層為隱層,該層使用高斯函數作為隱函數,表達式如下:

其中,x為上一層的輸出結果,參數 σ表示高斯函數的方差,而且該層中所有節點均使用同一個 σ.通過該層函數,我們可以將低維數據映射到高維空間,根據Cover 定理,低維空間不可分的數據到了高維空間會更有可能變得可分.然后通過連接權值傳入第四層輸出層,線性輸出結果.GPN 徑向基神經網絡結構中輸入層和展開層以及展開層和隱層之間的權值全設置為1.
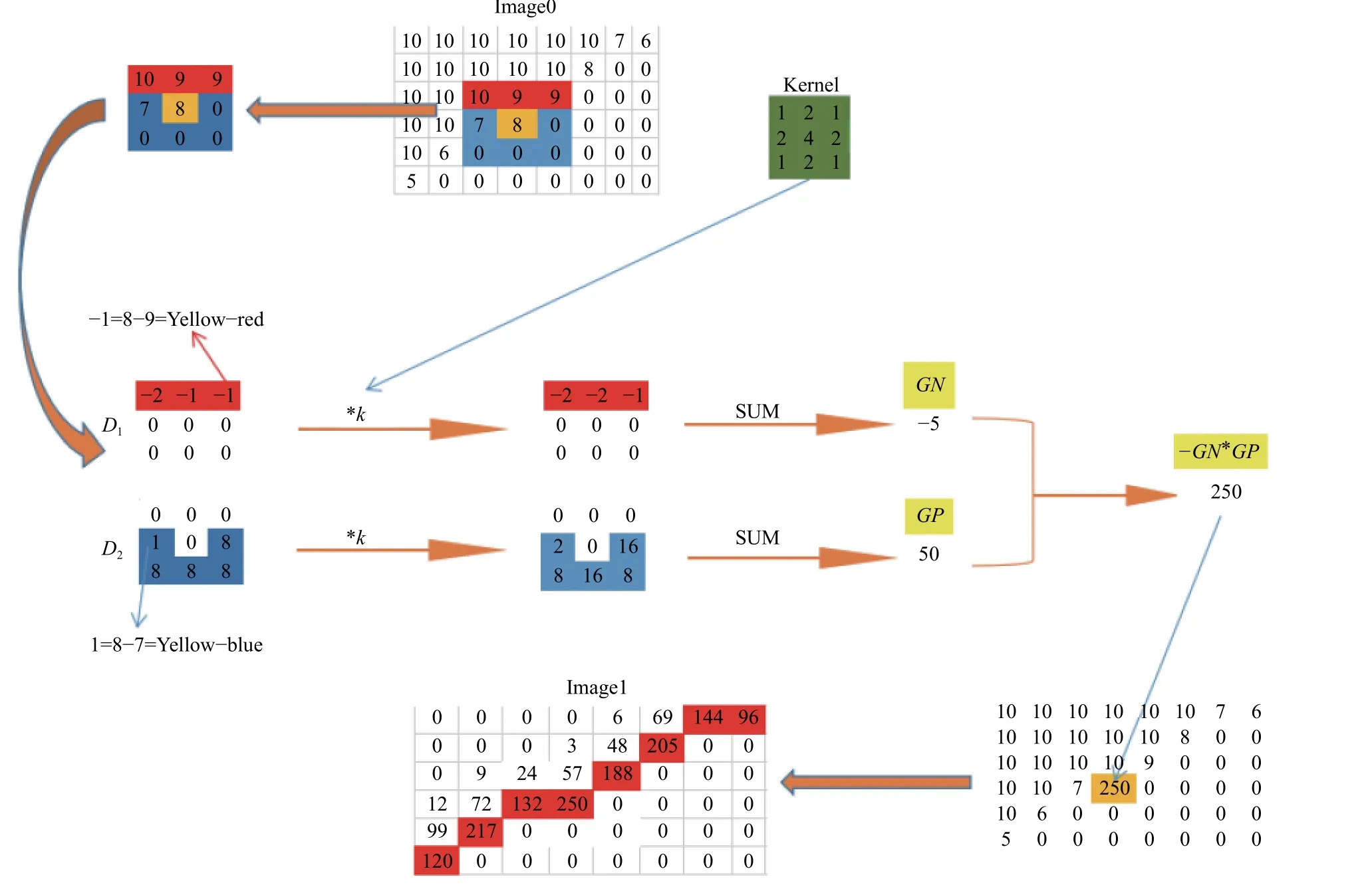
圖3 邊緣凸顯示意圖

圖4 GPN 徑向基神經網絡結構圖
GPN 徑向基神經網絡的具體訓練步驟如下:
步驟1.固定法確定中心點.
GPN 徑向基神經網絡中隱層節點數和輸入數據的數目是相同的,因此為了圖像信息的完整性,根據式(2)和式(3)令中心點di為 每一個輸入數據,i=1,2,···h,這么做不僅節省了選取中心點的時間提高了效率,并且確保了不會丟失圖像信息,所以這樣從輸入樣本中選取的中心點是合理的.
步驟2.固定法求解方差σ .
GPN 徑向基神經網絡使用高斯函數作為隱函數,其方差可由式(5)求解:

式中,Xmax為 圖像像素值的最大值,Xmin為圖像像素值的最小值,h為圖像像素點的個數.這樣不通過訓練直接求解方差 σ的方法,對于不同的圖像都能得到一個比較適合方差 σ,并且在一定程度上加快了訓練效率.
步驟3.計算隱層到輸出層間的權值.
由于GPN 徑向基神經網絡中輸入層節點數、隱層節點數以及方差 σ的值都確定,所以GPN 徑向基神經網絡從輸入到輸出就可以構成一個線性方程,其輸出權值訓練可以通過最小二乘法求解,如式(6)所示:

當GPN 徑向基神經網絡訓練完成后,在測試時可以繞過高維展開層壓縮,因為訓練完成后映射關系也就確定了,之后只要輸入值確定以后,就可以將輸入值直接映射到隱空間,這樣就可以對GPN 徑向基神經網絡結構進行簡化,如圖5 所示.

圖5 GPN 徑向基神經網絡輸入到隱層結構簡化圖
GPN 徑向基神經網絡還利用了CNN 中的權值共享和稀疏連接的特點,降低了網絡的復雜性,特別是對這種多維輸入向量的圖像可以直接輸入網絡這一特點,避免了特征提取過程中數據重建的復雜度.因此GPN徑向基神經網絡可以看做是對徑向基神經網絡的擴展,相當于給徑向基神經網絡的第一層加上了固定的權值.
將濾波后的60 幅圖像構成輸入樣本,作為輸入層訓練GPN 徑向基神經網絡.圖6 是GPN 徑向基神經網絡輸出的結果圖,可以明顯看到突顯的邊緣輪廓.最后根據輸出的結果,使用輪廓跟蹤的方法將邊緣提取出來以達到邊緣檢測的目的.

圖6 GPN 徑向基神經網絡結果圖
3 實驗分析
所有實驗均在Intel(R)Core(TM)i3-3220 CPU 3300和4.00 GB RAM 的個人計算機(PC)上使用Matlab R2016a 軟件實現.為了展示我們提出方法的有效性,通過人眼觀察和定量分析這兩個方面來進行實驗.在實驗中測試了5 個標準圖像,所有圖像的大小不定.分別采用文獻[15]中基于PCNN 的邊緣檢測方法、文獻[17]中基于遺傳神經網絡的邊緣檢測方法以及文獻[19]中基于CNN 的邊緣檢測方法與我們提出的方法進行比較,具體的評價指標有峰值信噪比(PSNR)、運行時間以及一種基于連通成分數的評價方法[23]進行算法優劣的評價,即基于4-連通成分數B、基于8-連通成分數C 以及C/B 的比值.C/B 的大小反映邊緣線形連接程度,而線形連接程度對邊緣檢測的總體影響反映在錯檢和漏檢中.已經證得C/B 值越小時,邊緣線形連接度越好,提取的邊緣效果越好.
實驗1 是采用本文方法與文獻[15,17,19]的方法對原圖以及添加椒鹽噪聲的圖像進行邊緣檢測,檢測結果如圖7 所示.實驗中,GPN 徑向基神經網絡采用5×5 大小且標準差為1 的高斯函數.輪廓跟蹤的其他參數設置為:threshold1=0.5,threshold2=0.2.其中圖7 的第2 行圖像是在第1 行圖像的基礎上添加0.1 的椒鹽噪聲圖像,以上4 種方法的運行時間、PSNR 和C/B的值如表1 所示.
從表1 可以看到,文獻[15,17,19]的峰值信噪比分別為38.4851 dB、41.1864 dB 和46.2710 dB,運行時間分別為3.66 s、3.94 s 和2.82 s,以及C/B 的值分別為0.7121、0.6738 和0.6051,而本文算法的峰值信噪比為48.6415 dB,運行時間為2.41 s,以及C/B 的值為0.5795,與之相比,本文提出的方法能較好的濾除椒鹽噪聲,在針對添加了椒鹽噪聲的圖像時能得到更好的邊緣檢測結果,并且在效率上也同樣具備優勢.

圖7 實驗1 邊緣檢測結果,其中第2 行是在第1 行的基礎上添加0.1 的椒鹽噪聲圖像

表1 圖7 中第二幅原圖的處理結果
實驗2 是采用本文方法與文獻[15,17,19]的方法對原圖以及添加高斯噪聲的圖像進行邊緣檢測,檢測結果如圖8 所示.實驗中,GPN 徑向基神經網絡采用5×5 大小且標準差為1 的高斯函數.輪廓跟蹤的其他參數設置為:threshold1=0.65,threshold2=0.2.其中圖8 的第2 行圖像是在第1 行圖像的基礎上添加0.1 的高斯噪聲圖像,以上4 種方法的運行時間、PSNR 和C/B的值如表2 所示.

圖8 實驗2 邊緣檢測結果,其中第2 行是在第1 行的基礎上添加0.1 的高斯噪聲圖像

表2 圖8 中第2 幅原圖的處理結果
從表2 可以看到,文獻[15,17,19]的峰值信噪比分別為39.1816 dB、43.4181 dB 和46.1767 dB,運行時間分別為3.15 s、3.62 s 和2.63 s,以及C/B 的值分別為0.6989、0.6509 和0.5991,而本文提出方法的峰值信噪比為48.6488 dB,運行時間為2.27 s,以及C/B 的值為0.5718,相比文獻[15,17,19],本文提出的方法在針對添加了高斯噪聲的圖像時同樣能得到較好的邊緣檢測結果,并且在效率上也有優勢.
從實驗1 和實驗2 可以看出,文獻[15]基于PCNN的邊緣檢測方法由于PCNN 模型中較為龐大的參數群以及參數設置方法的選擇,導致該方法的效率較慢;文獻[17]基于遺傳神經網絡的邊緣檢測方法中編碼染色體和評價函數選擇的困難以及為了尋求最優解,導致所需時間過長;文獻[19]基于CNN 的邊緣檢測方法中由于CNN 模型依賴于分類函數,而分類函數很慢且不一致,所以效率有所降低;而本文提出的基于GPN 徑向基神經網絡的邊緣檢測方法,相較于其他方法,在效率上有所提升且能得到較好的邊緣檢測結果.
實驗3 是采用本文方法與文獻[15,17,19]的方法以及Canny 算子分別對灰度不均勻的圖像進行邊緣檢測,檢測結果如圖9 所示.實驗中,GPN 徑向基神經網絡采用5×5 大小且標準差為1 的高斯函數.輪廓跟蹤的其他參數設置為:threshold1=0.5,threshold2=0.5.基于連通成分數評價結果的具體數據如表3 所示.

圖9 實驗3 邊緣檢測結果

表3 圖9 中第2 幅原圖的連通性結果
從表3 可以看出,與Canny 算子以及文獻[15,17,19]中的方法相比,在弱邊緣較多的標準圖像中,由于本文提出的GPN 徑向基神經網絡突顯了邊緣,加強了弱邊緣的提取能力,所以檢測到的8-連通成分數和4-連通成分數的比值最小,說明本文方法檢測到的邊緣圖像的線形連接程度是最好的,同樣也說明了由本文方法得到的邊緣檢測結果是最好的.
4 結論與展望
本文從人眼視覺系統的特性出發,提出了一種基于GPN 徑向基神經網絡的邊緣檢測方法.首先,在預處理階段利用高斯濾波平滑圖像,之后將預處理后圖像中的每個像素點輸入GPN 徑向基神經網絡,經過擴展層和隱層計算后輸出結果,最后根據GPN 神經網絡的輸出結果利用輪廓跟蹤的方法將輪廓提取出來達到邊緣檢測的目的.由于GPN 徑向基神經網絡構造上的特性,從而使本文方法相較于其他基于神經網絡的邊緣檢測算法在效率上有所提升,且能得到較好的邊緣檢測結果.GPN 徑向基神經網絡方法的不足是,方法在針對部分圖像凸顯輪廓的同時加粗了邊緣的厚度,接下來的工作是設計更精細的結構,既能凸顯輪廓,又能保持原始邊緣的寬度,得到更好的邊緣檢測結果.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
