自動送貨機器人結構設計
2020-03-22 03:30:38董小雷李冬梅
機械工程與自動化 2020年1期
關鍵詞:結構
董小雷,李冬梅
(華北理工大學 機械工程學院,河北 唐山 063210)
0 引言
近年來,我國快遞業發展迅速,企業數量大幅增加,業務規模持續擴大。但與此同時,快遞業務的迅速增長也帶來了諸多問題,其中末端配送環節更是成為快遞服務質量提升的軟肋。末端配送又稱“最后一公里”配送,它是快遞企業配送的最后一個環節,是實現物品從配送中心轉移到消費者手中的關鍵環節[1]。
目前,快遞末端配送存在的問題主要包括服務質量不高、配送時效性差、取貨便捷程度低、包裹破損和丟失率高、大件配送難、配送車輛不規范等。而園區人口密集、管理森嚴,為保障居民的安全,通常禁止快遞三輪車入內,再加上園區居民時間規律性差,接收快件時間不固定,而物業又不愿代收快件。作為園區“最后一公里”配送人員,其配送業務量較大,配送包裹內容復雜且分散,因無法準確把控收件人接收時間,導致二次配送較多。
本文基于這樣的背景,研究設計了一種能實現園區內自主送貨的自動送貨機器人,有效地解決了園區“最后一公里”配送存在的一系列問題。
1 研究現狀
1.1 國內研究現狀
2017年6月18日,京東快遞機器人進行了首次試運營。該機器人能夠實現360°環境監測、自動避障、準確識別紅綠燈、自主停靠配送點等功能。2018年4月,國內第一輛可實現電梯交互的蘇寧自動送貨機器人“臥龍一號”首次執行包裹配送任務。2017年8月,唯品會研制出智能快遞無人車,擁有20個快遞儲存空間且可自由組合。該車能夠獨立完成訂單配送的一系列過程,包括路徑規劃、自主導航、智能避障等。其中,最具代表性的是京東送貨機器人,如圖1所示。
1.2 國外研究現狀
英國于2015年年底推出的第一臺配送機器人Starship,載重為9kg,配送范圍最遠可以到物流中心方圓1.6km的地方。美國研發的Nuro機器人行駛區域廣泛,其車身結構和材料都是為了最大程度上保護周圍的行人而設計的。其次,Nuro配備冷藏和加熱裝置,可以滿足不同物品配送需求。2018上半年,韓國推出一款Dilly食品配送機器人,主要實現食品配送任務。美國Nuro機器人如圖2所示。

圖2 Nuro機器人

圖1 京東送貨機器人
2 自動送貨機器人整體結構的設計
自動送貨機器人系統主要包括機械系統和控制系統兩大部分[2]。機械系統是機器人系統的基礎,執行控制系統發出的運動控制指令。自動送貨機器人機械系統主要包括行走機構、底盤、快件廂柜、取貨裝置以及車體外殼。首先由SolidWorks軟件繪制各部分結構的零件圖,然后將其裝配成一個整體。自動送貨機器人整體結構如圖3所示。
考慮到自動送貨機器人的功能性和實用性,其機械結構應滿足以下要求:
(1)結構簡單合理,傳動力求簡單。
(2)具有較強的承載能力,能為后期添加的貨物預留足夠的承重空間。
(3)整車質量輕便、穩定性好,同時框架結構符合強度、剛度要求。
(4)盡量使用標準件,方便后期維修。
2.1 行走機構
機器人行走機構主要包括足式、履帶式、輪式三種[3]。足式行走機構路面適應力強,可以行走、跳躍、上下臺階,但其設計和控制難度較大。履帶式行走機構對松軟和不平坦地面的適應能力高,但它轉彎不靈活,容易損壞機體和路面光滑度。輪式行走機構自重輕、機構簡單、驅動和控制相對方便,適合在平坦的路面上移動。綜上所述,輪式行走機構相比較足式和履帶式具有更好的綜合性能[4]。
本設計選用四輪輪式行走機構,前兩輪為主動輪,后兩輪為從動輪,每個主動輪由電機單獨驅動,通過兩個主驅動輪的差速來實現轉向[5]。同時,為了加大底盤空間布局,降低機器人自身重量,本設計將電動機整合到車輪中,變成輪轂式電動機,這種布局是通過電動機來直接帶動輪子轉動,縮短了電動機傳遞動力到輪子的作用路徑。這種設計不僅簡化了底盤結構,且具有傳動效率高、運行平穩、結構連接方便等特點。
2.2 取貨裝置
取貨裝置的作用是實現貨物的選取和傳送。目前取貨裝置主要有機械手和貨叉兩種方式。機械手的智能化程度高,定位精確,運送過程平穩,但其自由度多,結構復雜,控制難度較大。貨叉可以實現雙向取貨,結構簡單,傳動容易實現。本設計選用三級貨叉取貨裝置,其主要包括水平移動機構、縱向立柱、貨叉及載貨臺[6],其結構如圖4所示。

圖3 自動送貨機器人整體結構
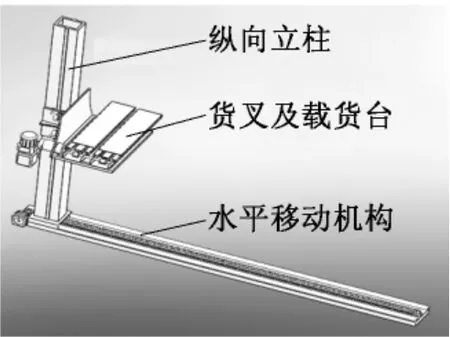
圖4 三級貨叉取貨裝置
取貨裝置工作過程如下:行駛過程中,取貨裝置不工作,處于預先設定好的初始位置。當取貨裝置接收到動作指令后開始工作,首先水平移動機構通過滑動導軌帶動立柱、貨叉及載貨臺定位到貨物所在列,然后載貨臺連同三級貨叉通過上升或下降的垂直運動定位到貨物所在層,最后判別貨叉的伸縮方向進行取貨。取貨過程中,立柱、上貨叉和載貨臺的位移隨時間的變化曲線如圖5所示。
貨叉采用三級直線差動式伸縮貨叉,由下叉、中叉和上叉組成[7],其結構是根據貨格尺寸和貨架間的寬度來設計的,如圖6所示。下叉固定在載貨臺上,其兩側有導向滑輪用于導向運動。動力裝置安裝在下叉上,通過傳動機構驅動中叉相對于下叉運動,由于下叉、中叉和上叉之間采用了柔性同步帶連接,當中叉相對于下叉以速度v運動時,中叉會以相同的速度帶動上叉運動,使得上叉相對于下叉的速度為2v,從而實現三級貨叉的伸縮運動。
2.3 快件廂柜
快件廂柜作為快件的載體,其結構對機器人配送量和安全性能都有很大的影響。本文所設計的快件廂柜與機器人本體配合使用,能夠實現快件的合理存放、取貨裝置結構緊湊、取件口便于控制等目標,以滿足存儲空間利用率高、貨物破損率低、能夠自動控制等要求。快件廂柜結構如圖7所示,由于主要是針對塑料袋、紙袋和小型紙箱包裹配送,因此左右兩側貨架設置成三種規格尺寸,分別為275mm、400mm、325mm。貨格的單位尺寸為100mm,每個快件單獨存放在一個貨格內的托盤上。每列貨格間的托盤可以隨意移動或拆卸,以實現大小包裹間的柔性存儲。
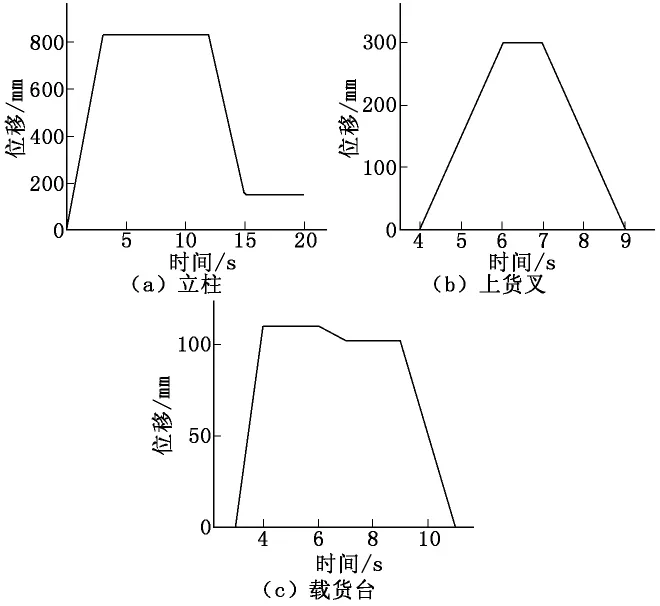
圖5 立柱、上貨叉、載貨臺的位移隨時間變化曲線

圖6 貨叉結構

圖7 快件廂柜結構
2.4 車架與底盤
車架類型主要包括邊梁式、中梁式和無梁式[8]。邊梁式車架一般由兩根縱梁和若干根橫梁通過鉚釘或焊接方式連接。中梁式車架由一根中央縱梁和橫向懸伸托架組成,其扭轉剛度較大,行駛穩定性好,但缺點是制造工藝復雜,安裝難度大。無梁式車架是指沒有單獨的車架,所有的總成和零部件都安裝在車身上,由車身承受各種力和力矩。綜合考慮,自動送貨機器人采用邊梁式車架。車架作為電機、底盤和車身中各主要總成的安裝基體,承受著機器人的各種載荷和行駛時從車輪傳來的沖擊。應滿足如下要求:
(1)有足夠的剛度和強度。
(2)車架的質量盡可能輕,車架的高度盡量低以減小整車重心的離地距離。
由于機器人的底盤上要裝載所必須的設備,因此自動送貨機器人的底盤要具有一定的承載能力和運動能力。底盤布局如圖8所示。送,還能用到生活中的很多方面,具有較廣闊的發展前景。
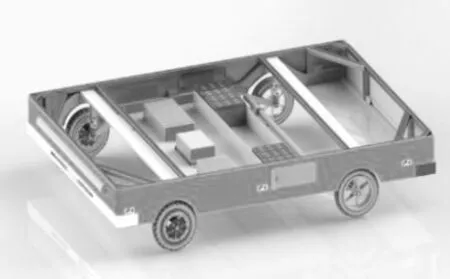
圖8 底盤布局
3 結語
根據快遞業的發展狀況以及末端配送存在的一些問題,本文設計了一種結構簡單、貨物裝載量大且可以在相對復雜的環境中作業的新型送貨機器人。它極大地改善了園區內末端配送呈現的配送效率低、成本高、配送員勞動強度大等問題。由于機器人高度的可擴展性,未來自動送貨機器人不僅可以用在末端包裹的配
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
