基于FBG 的行星齒輪箱內齒圈齒根應變動態檢測方法研究*
2020-03-22 03:30:46楊隆慶孫文磊安鵬程
機械工程與自動化 2020年1期
楊隆慶,何 麗,孫文磊,安鵬程
(新疆大學 機械工程學院,新疆 烏魯木齊 830046)
0 引言
行星齒輪箱具有體積小、傳動效率高、承載能力強等特點,因而被廣泛應用于各類機械設備中[1-2]。行星齒輪箱處于低速重載的工作環境中,發生故障的概率較高,因此,為提高機械設備的運行效率,降低維護工作量,開展對行星齒輪箱運行狀態的監測是十分必要的。
行星齒輪箱運行過程中,既有各齒輪的自轉,同時還有行星輪隨行星架的公轉,運行狀態比較復雜,這就造成了以加速度信號作為載體來反映行星齒輪箱的運行狀態存在一定困難。近些年來,針對光纖光柵傳感器(FBG)的研究取得了突飛猛進的發展,因其具有結構簡單、體積小、穩定性好、抗干擾能力強等特點,應用場合正在不斷被擴展[3-4]。在行星齒輪箱內部,內齒圈處于固定不動的狀態,因此十分適合布置傳感器,同時齒根應變直接或間接反映行星齒輪箱內部各齒輪的嚙合狀態,故本文采用FBG對行星齒輪箱內齒圈齒根應變進行檢測,進而監測行星齒輪箱運行狀態。
1 FBG傳感模型的建立
光纖光柵傳感器(FBG)屬于波長調制型非線性作用的光纖傳感器,通過光刻技術,在普通光纖上加工柵格周期為Λ的光柵。從光源發出的寬帶入射光經過光柵區域時,特定波長的光會被反射,根據光纖耦合理論[5-6],FBG傳感器反射光波長λB的計算公式為:
λB=2neffΛ . (1)
其中:neff為光纖纖芯材料的有效折射率。
當FBG傳感器受到外界力的作用時,光纖則會產生拉伸或壓縮變形,導致柵格周期發生變化,進而導致反射光波長發生變化,形成波長漂移,記做ΔλB。根據耦合理論,FBG的軸向應變與波長漂移量成正比關系。因此,通過解調模塊監測FBG傳感器的反射光波長,即可反演推算得到FBG的軸向應變量,進而得到行星齒輪箱內齒圈齒根應變。FBG的軸向應變εz與波長漂移量的關系為:
2 FBG傳感器布設方案設計
根據FBG傳感理論模型可知,其只能檢測軸向應變,因此需要對內齒圈齒根應變敏感區域進行分析,使得FBG傳感器位于應變最大區域。利用ANSYS Workbench軟件對輪齒進行接觸受力分析,將內齒圈完全約束,對行星齒輪施加扭矩并提取應變結果。由分析結果可知,齒根應變主要集中于沿齒寬方向兩側齒根圓角處以及沿周向齒槽根部,如圖1所示。考慮實驗臺齒輪的模數為1mm,其頂隙為0.25mm,而實驗用的FBG直徑約為0.24mm,因而無法保證輪齒根部圓角位置有充分空間來安裝FBG傳感器。因此,在實驗過程中,將FBG傳感器安裝于內齒圈齒槽根部,沿周向布置,如圖2所示。
3 內齒圈齒根應變檢測實驗
3.1 實驗裝置
實驗以SQI風力發電機傳動系統實驗臺中行星齒輪傳動部分為研究對象,其太陽輪、行星輪和內齒圈的參數如表1所示。
實驗臺以變頻電動機為原動機,以磁粉制動器為模擬負載裝置,傳動系統主要包括平行軸齒輪箱和行星輪齒輪箱兩部分。根據前文分析,將FBG傳感器粘貼于行星齒輪箱內齒圈齒槽根部,再將傳感器與光源、解調模塊、數據采集模塊連接,組成行星齒輪箱內齒圈齒根應變動態檢測系統,如圖3所示。
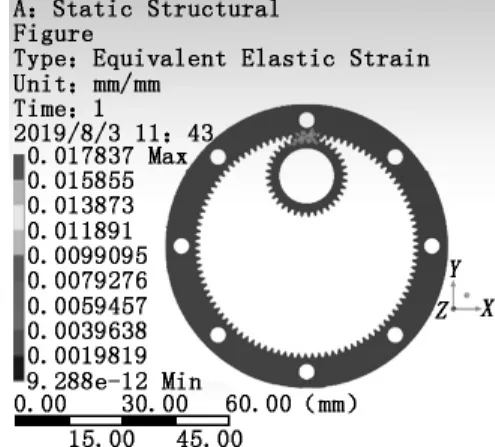
圖1 行星齒輪與內齒圈嚙合應變云圖
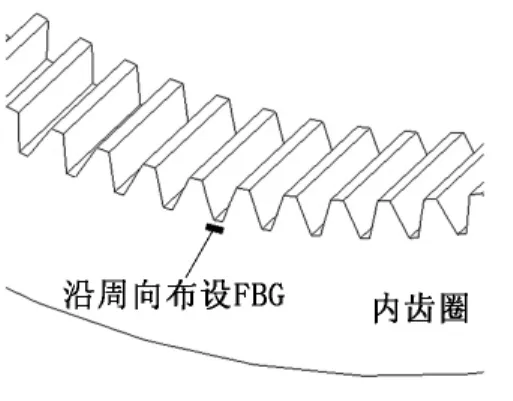
圖2 FBG傳感器安裝位置
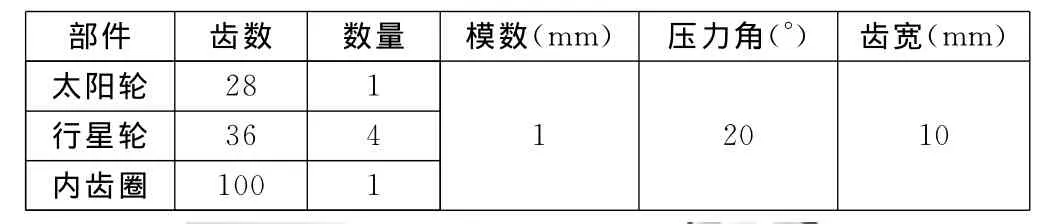
表1 行星齒輪箱結構參數
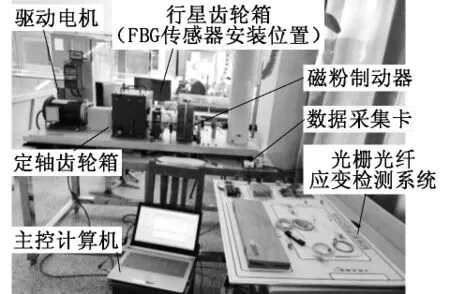
圖3 齒根應變動態檢測系統
3.2 實驗結果分析
設置實驗臺驅動電機轉速為450r/min,磁粉制動器分別處于17N·m、35N·m、60N·m、75N·m四種不同負載扭矩下,利用所搭建的齒根應變檢測系統采集行星齒輪箱內齒圈齒根應變信號與輸出軸鍵相信號。利用MATLAB軟件對采集的電壓信號進行濾波降噪,并截取穩定區域以便進行分析。
圖4為驅動電機轉速為450r/min、負載扭矩為75 N·m時采集的內齒圈齒根應變信號時域及頻域圖譜。圖5為驅動電機轉速為450r/min,負載扭矩分別為60 N·m、35N·m、17N·m情況下的內齒圈齒根應變信號時域圖譜。由圖4(a)可知,在輸出軸(行星架)兩個鍵相信號中間,可以觀測到行星齒輪箱中4個行星齒輪與內齒圈固定齒嚙合時產生的應變信號,在一對輪齒的完整嚙合周期內,FBG傳感器先后經歷拉伸和壓縮兩個過程,造成信號圖譜上出現正負電壓交替的現象,每一個應變信號的波峰之間的間隔為行星架轉動周期的1/4,并且由于安裝誤差的存在,每一個行星齒輪與固定齒嚙合所產生的應變信號形態也不完全一致。由圖4(b)可知,電壓幅值最高的譜線為行星架轉頻的4倍頻,這是由于行星齒輪箱內部存在4個行星齒輪,其通過頻率與行星架轉頻耦合,形成該現象。
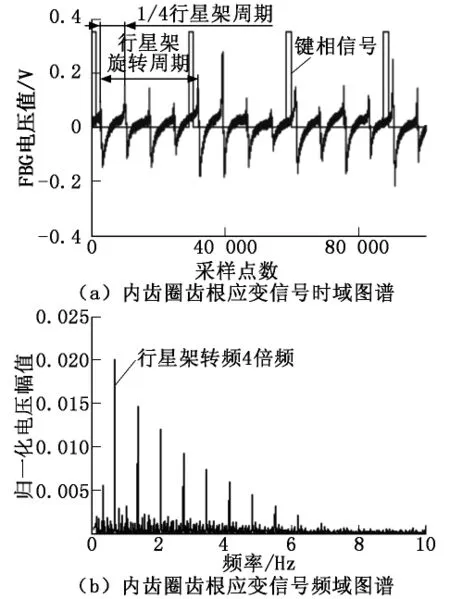
圖4 電機轉速為450r/min、負載扭矩為75N·m時的內齒圈齒根應變信號時域及頻域圖譜
由圖5可知,隨著負載扭矩的不斷減小,行星齒輪與內齒圈相互嚙合過程中所傳遞的嚙合力逐漸減小,造成齒根應變信號的幅值不斷減小,并且由于安裝誤差的影響,在行星架的一個旋轉周期之內會出現某個行星齒輪與齒圈嚙合的齒根應變信號淹沒于噪聲之內。
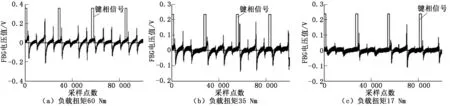
圖5 驅動電機轉速為450r/min不同負載扭矩情況下的內齒圈齒根應變信號時域圖譜
上述現象與理論分析能夠較好地吻合,說明齒根應變信號能夠反映行星齒輪箱的嚙合狀態,對行星齒輪箱狀態監測工作能夠提供支撐。
4 結論
本文通過分析FBG傳感器的傳感模型與耦合理論,并對寬帶光源、傳感光路、光電轉換、信號解調以及數據采集等模塊進行集成,搭建了齒根應變動態檢測系統。并針對行星齒輪箱的不同負載工況進行了多次實驗驗證與數據分析,結果證明該方法能夠實現對行星齒輪箱內齒圈齒根應變動態檢測,采集的數據能夠與理論分析相吻合,能夠為后續行星齒輪箱嚙合狀態監測提供參考。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
