基于卡爾曼濾波器的索道轎廂相對定位方法及應用
2020-03-22 03:30:56丁洪濤
機械工程與自動化 2020年1期
蒙 娟,丁洪濤
(1.北京勞動保障職業學院,北京 100029;2.深圳前海索士科技有限公司,廣東 深圳 518052)
0 引言
客運索道是一種現代化的立體軌道交通設施,由于它安全、快捷、高效、環保,目前在我國風景區和滑雪場得到了廣泛應用。隨著經濟的發展,人們對乘坐索道的安全性和舒適性有了更高的要求。其中,索道轎廂的實時精準定位是實現索道運營安全、乘坐舒適的必要前提。通過對索道轎廂的實時定位,人們能隨時掌握轎廂的精確位置,以便發生危險時進行緊急救援;通過對索道轎廂的實時定位,索道實現定位播放音視頻,旅客可以乘坐索道走到哪聽到哪,旅行途中不再單調,乘坐體驗感更好。因此,客運索道定位系統的研發受到索道行業的普遍關注。
而客運索道多是建造在奇山異水、崇山峻嶺之處,地理環境復雜惡劣,衛星信號容易受到森林、高山的遮擋,出現信號不連續、不穩定,定位精度不高等現象,造成索道轎廂位置定位不夠精準,同時,索道轎廂運行速度慢,且轎廂之間間距較小,加大了轎廂定位精準的難度。本文提出一種基于卡爾曼濾波器的GPS相對定位新算法用于解決這些問題。
1 索道轎廂相對定位原理
1.1 基于GPS的索道轎廂相對定位
GPS是一種無線電導航定位系統,它利用導航衛星進行測時和測距,確定用戶在空間特定坐標系中的位置。GPS定位分為單點定位和相對定位。GPS相對定位也叫差分定位,是目前GPS測量中定位精度最高的定位方法,它被廣泛應用于大地測量、精密工程測量、地球動力學的研究及精密導航中[1]。
索道轎廂相對定位就是設置一個固定位置即坐標精確已知的基站(通常為索道站房),通過測定索道每個轎廂與基站之間的Δx、Δy、Δz坐標分量,從而計算出每個轎廂的精確坐標。同時,根據轎廂相對定位隨時間的變化,結合索道線路的基本方位和走向信息,分別計算出索道多個轎廂的運行方向,為索道控制系統提供精確的轎廂定位信息[2]。索道系統包含轎廂和站房,適合采用差分定位技術進行索道轎廂的相對定位。
1.2 索道轎廂位移測量方法
索道轎廂相對定位的輸出結果是經緯度,而數據處理時需要的是索道轎廂實際位移,因此需要將經緯度換算成位移。把半徑為R的地球置于直角坐標系中,球心位于坐標原點,赤道L所在平面與坐標X、Y構成的平面重合,將經緯度換算成位移示意圖如圖1所示。(注:地球實際為橢球體,長半徑為6 378 137.07 m,短半徑為6 356 752.48m[3],若將地球看成球體,誤差為千分之三,對項目影響非常小,因此本文將地球看成球體進行計算。)

圖1 將經緯度換算成位移示意圖
地球表面有一點P,坐標為(x,y,z),設α、β分別是經度和緯度,顯然有:


若P點移動一段位移ds,則:

對式(5)~式(7)求平方得:
將式(8)~式(10)代入式(4)得:

可見位移ds被分解成沿東西方向的分量Rcosβdα和沿南北方向的分量Rdβ。
2 基于卡爾曼濾波器的索道轎廂相對定位
卡爾曼濾波是一種利用線性系統狀態方程,通過系統輸入輸出觀測數據,對系統狀態進行最優估計的算法。由于它便于計算機編程實現,并能夠對現場采集的數據進行實時的更新和處理,因此,卡爾曼濾波在通信、導航、制導與控制等多領域得到了廣泛的應用[4]。卡爾曼濾波器要求建立數學模型來描述系統,所建立的數學模型與系統的真實模型越匹配,則濾波器輸出的最優估計值越接近于真實值。
為了方便乘客上下,使乘客獲得更好的乘坐體驗感,一般客運索道的行駛速度不會太高且運行平穩,大多數索道站內速度不高于1m/s,站外速度不高于10 m/s。而GPS采樣周期很短,因此我們可以將索道轎廂的運動看作是勻速運動,并以此來建立數學模型。
首先我們要利用系統的過程模型,來預測下一狀態的系統。設轎廂與站房之間的距離狀態量為S,建立的狀態方程如下:

其中:S(n)為在n時刻索道轎廂與站房之間的距離;T為采樣周期;U(n)為系統激勵輸入向量;w(n)~N(0,Q)為過程噪聲。
設轎廂與站房之間的距離實際測量值為Zg,建立的觀測方程如下:

其中:Zg(n)為在n時刻的系統測量結果,由1.2中通過GPS定位采集的計算式(11)導出;H(n)為測量系統參數,此處 H(n)=I,I為單位矩陣;v(n)~N(0,R1)為測量噪聲。
根據上述的狀態方程和觀測方程建立卡爾曼濾波器。
2.1 預測
(1)預測值。設S(n|n-1)為卡爾曼濾波器在n時刻的預測值,則:

其中:S(n-1|n-1)為n-1時刻系統的最終優化狀態值。系統激勵輸入向量U(n)推導過程如公式(15)所示:

其中:Ku為U(n)的卡爾曼誤差增益。
(2)預測方差矩陣。設P(n|n-1)為系統預測方差,則:

其中:P(n-1|n-1)為上一時刻的系統修正方差;Q為過程噪聲高斯分布尺度參數。
2.2 修正
(1)誤差增益。設Ks為S(n)的卡爾曼誤差增益,則:

其中:R為測量噪聲高斯分布尺度參數。
(2)修正值。設S(n|n)為系統在n時刻的最終優化狀態值,也就是卡爾曼濾波器的系統輸出值,即濾波結果,則有:
S(n|n)=S(n|n-1)+Ks(n)[Zg(n)-S(n|n-1)].(18)
(3)測量值。測量值Zg(n)的值由索道轎廂的位移測量方法得出,詳見1.2中公式(11)的推導,即:

(4)修正方差矩陣。設P(n|n)為系統修正方差,則:

至此,已經完成整個系統的遞推計算。卡爾曼濾波器的輸入為GPS定位模塊采集的經緯度,即α、β,通過對其進行轉換可得索道轎廂相對索道站房的實測距離,經過上述遞推演算,最終獲得系統濾波結果S(n|n)。
3 實驗結果及分析
采用本文所研究的基于卡爾曼濾波器的索道轎廂相對定位方法,對深圳市東部華僑城景區索道開展實驗。由于天氣、環境、索道運行速度等因素都會對轎廂位置的測量造成影響,因此通過設置特定濾波系數、修正值和不確定系數后,獲取索道轎廂位置在濾波前、后的試驗結果,如表1所示。表1中,濾波前的值為測量值,即Zg(n),濾波后的值為濾波器輸出值,即S(n|n)。
濾波前、后的索道轎廂時間—位移曲線如圖2所示。由圖2可以看出,濾波后轎廂位移均勻有序,符合索道正常運行特征。
4 結論
本文針對索道行業中索道轎廂在線路上的定位問題,結合GPS定位的特點,計算出各個轎廂以索道站房為坐標原點的相對定位,通過卡爾曼濾波器對相對定位的東西分量和南北分量分別濾波,同時考慮到索道走向對濾波系數的影響,為不同走向的索道研制出一套相對定位的通用算法,既滿足了定位精準度,又保證了數據的實時性。其結果符合索道的運營要求,已經成功應用于索道行業,為國內多條索道的運營提供了幫助。

表1 索道轎廂位移在濾波前、后數據對比
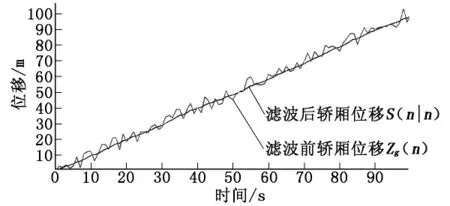
圖2 濾波前、后索道轎廂時間—位移曲線
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
