高速動車組永磁同步電機牽引控制仿真研究
2020-03-25 07:22:26翟士述
儀器儀表用戶 2020年3期
翟士述
(遼寧鐵道職業技術學院,遼寧 錦州 121000)
永磁同步電機具有體積小、重量輕、運行效率高等特點,并且啟動轉矩大,調速范圍寬,比較適合作軌道動車組的牽引電機。隨著永磁同步電機(PMSM)的發展以及新的永磁材料的出現,永磁同步電機將在軌道交通領域有著更重要的作用[1]。
結合動車組運行的工況,在給定牽引特性曲線下運行,尋找電機的最優工作點,規劃電流軌跡。文獻[2]討論按電流極限圓弱磁的規律,電機一直在極限狀態運行,不適合動車組牽引系統,本文提出按動車組牽引特性曲線運行的正常工況下,或降負載運行時的一種電流路徑規劃。
1 永磁同步電機調速區域劃分
同步旋轉坐標系下電動機定子繞組電壓方程為[3]


圖1 永磁同步電機電壓電流相平面圖Fig.1 Permanent magnetic synchronous motor voltage current phase plan
電動機定子磁鏈方程

式中:ωe為電角速度;ψf為永磁體的磁鏈;Ld與Lq為發電機的d、q 軸電感;id和iq為d、q 軸的輸出定子電流分量;ud和uq為d、q 軸輸出定子電壓分量;受中間直流環節電壓的影響,電壓極限圓方程為

根據永磁同步電機的約束關系,可以把電機運行區間劃分成3 個區間[4]。
區間Ⅰ(ω<ω1),又稱作恒轉矩區間,電機在基速以下運行,采用最大轉矩電流比控制(MTPA)可以獲得最大轉矩,并保持最大轉矩穩定。
轉折速度為

其中,C 為

區間Ⅱ(ω1<ω<ω2),當電機轉速大于ω1時,由于電壓極限圓的限制,電機將不能維持穩定運行,不能維持最大力矩,需要弱磁運行,電機運行進入恒功率狀態。
區間Ⅲ(ω2<ω),隨著電機轉速的升高,電壓極限圓不斷縮小,與力矩曲線相切時,是電機最大轉矩電壓比的穩定運行點,弱磁區間Ⅲ就是最大轉矩電壓比曲線(MTPV),又稱最大功率曲線,在MTPV 上運行電機在轉速一定時,輸出功率最大。只有當ψf/Ld≤is時,才會出現最大轉矩電壓比曲線。
2 永磁同步電機弱磁區域的確定
為滿足動車組的牽引需要,啟動時有很大的啟動轉矩,運行時有較寬的調速范圍,在基速以下采用最大轉矩電流比控制,電機可以沿著最大轉矩電流比曲線運行。工作在A 點,當電機達到基速以上時,電機沿著電流極限圓運行由A 點到C 點;當電機達到最大轉矩電壓比曲線時,按最大轉矩電壓比曲線運行,電機一直工作在最大運行能力。
動車組想要在低擋位牽引特性曲線運行或由高擋位變到低擋位時,電機按最大轉矩電流比曲線由A 點向B 點運行,此時電機電流最小,效率最高;當電機轉速升高時,電壓極限圓縮小電機不能穩定運行,需要采用新的弱磁控制,按電壓極限圓與力矩曲線的交點運行,由B 點到P 點運行,直到達到最大轉矩電壓比曲線,滿足電機的低牽引特性曲線運行。
2.1 弱磁控制數學模型
在極限工況下,最大轉矩電流比控制下交直軸極限電流分別為

當電機按電流極限圓工作時,交直軸電流分別為
2.2 低擋位運行時最大轉矩電流比控制
動車組是按牽引特性曲線運行,永磁同步電機采用力矩控制,在保證輸出力矩達到要求的情況下,永磁同步電機采用最大轉矩電流比控制,所需要的電流最小,提高輸出效率。
最大轉矩電流比控制數學模型

為了簡化計算,對電機模型進行標幺化計算,記轉矩基值為Tb=1.5PnΨfib,電流基值為ib=Ψf/(Lq-Ld),可以得到電磁轉矩的方程為

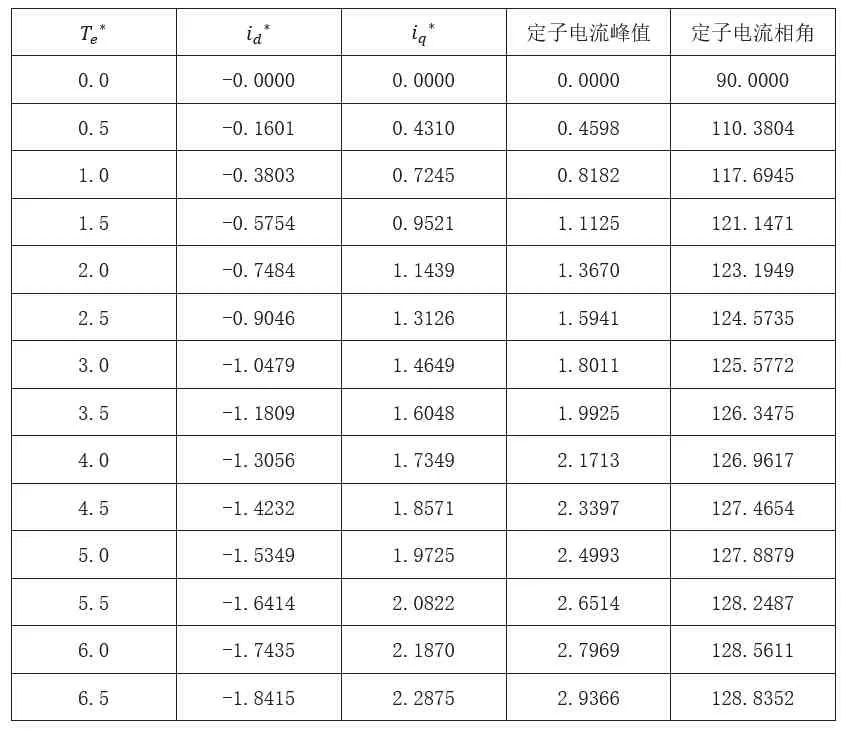
表1 最大轉矩電流比控制下的交直軸電流Table 1 Maximum torque current ratio of cross-straight shaft current under control
動車組是按牽引特性曲線控制的,力矩的大小是已知的,求出直軸的最小電流和交軸最小電流,作為電流控制器的給定實現IPMSM 的MPTA 控制。
式(11)的解析式為


可以看出,直軸電流的解析式十分復雜,可以將上式做成表格,進行實時控制時可以查表使用,見表1。
3 PMSM矢量控制系統仿真分析
搭建永磁同步電機矢量控制系統結構框圖,結合基于轉子磁場定向的矢量控制,其中,PMSM 參數為:額定轉速900r/min,定子電阻Rs=0.11Ω,極對數Pn=3,交軸電感Lq=29mH,直軸電感Lq=9mH,永磁體磁鏈Ψf=1.2Wb,轉動慣量J=0.8kg·m2,直流環節電壓Udc=750V。
3.1 仿真結果分析
在給定不同動車組牽引特性曲線下,分別分析最大牽引特性曲線工況下電流軌跡,并研究變工況下電機電流的運行軌跡。

圖2 永磁同步電機矢量控制系統結構框圖Fig.2 Structure diagram of the vector control system of the permanent magnetic synchronous motor

圖3 給定動車組牽引特性曲線Fig.3 Given group traction characteristic curve

圖4 電流極限圓運行軌跡Fig.4 Current limit round run track
圖3 中紅色為動車組最大牽引能力運行曲線。由圖4可知,在id 和iq 相平面上為一段圓弧,由弱磁Ⅰ區到弱磁Ⅱ區的電流極限圓。圖5 為動車組最大運行牽引特性曲線下的電機功率。
3.2 低檔位牽引特性曲線工況下電機電流運行軌跡
由圖6 可知,動車組恒力矩啟動,當速度達到7km/h時,動車組力矩開始減小,此時電機仍然工作在弱磁Ⅰ區,繼續采用最大轉矩電流比控制,能減小電機工作電流。由圖7 可知,電機工作點移動到(-77,103),當動車組速度達到10km/h 時,受中間直流環節的影響,電機工作進入弱磁Ⅱ區,切換平滑、去磁電流增大、總電流小,滿足動車組的牽引特性曲線。圖8 為低檔位下動車組運行功率,由恒力矩進入恒功率工況。
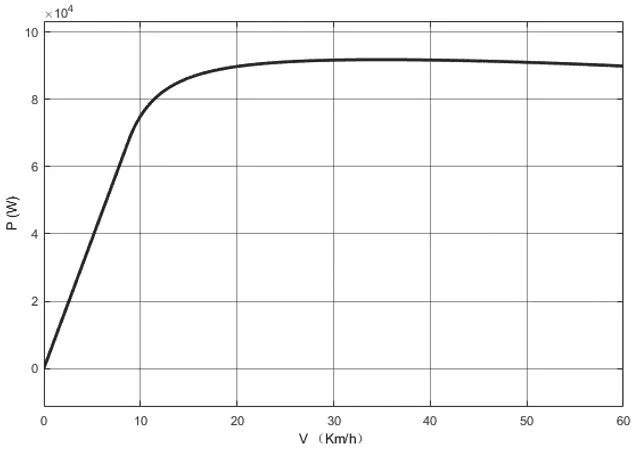
圖5 動車組運行功率Fig.5 Motor group operating power

圖6 低檔位id電流Fig.6 Low gear id current

圖7 低擋位牽引特性曲線Fig.7 Low gear traction characteristics curve

圖8 低檔位動車組運行功率Fig.8 Low-grade moving group operating power
4 結論
本文對永磁同步電機基本數學模型進行分析,采用矢量控制方法,搭建了矢量控制系統,對不同工況下電機電流運行軌跡進行分析,給出了電機最大運行能力運行曲線與變工況下電機電流運行軌跡,提高效率,實現平滑過渡。