基于Grasshopper的汽車格柵CAS模型參數化設計
2020-03-26 06:19:30王立宏
汽車零部件 2020年2期
王立宏
(北京現代汽車有限公司,北京 101300)
0 引言
參數化設計最早在建筑領域應用較多,目前已有大量實際建筑應用,國內比較著名的參數化建筑有鳥巢及水立方等。隨著參數化設計工具的推廣及現代制造工藝的進步,越來越多的汽車上出現了參數化造型特征,其中汽車前格柵最易被參數化設計,如圖1所示的奔馳CLA參數化造型前格柵,稱之為“滿天星”,通過小六邊形的亮點圍繞著奔馳三叉戟圓形LOGO及前格柵邊框有規律地排布,營造出緊致而又精致的美感,為整體造型錦上添花。對于“滿天星”等參數化造型特征,傳統的建模方式可實現,但無論是初次建模還是后期方案推敲修改,均避免不了大量的手工操作,嚴重影響造型開發效率。合理運用參數化設計可很大程度上提高CAS建模速度,縮短造型開發周期。

圖1 奔馳CLA
1 參數化設計優勢與工具介紹
1.1 參數化設計優勢
參數化設計(Parametric design)目前還沒有一個廣泛認可的定義,一般理解為將某些重要因素變成某個函數的變量,通過改變該變量值,改變函數結果,從而生成不同的方案。
(1)傳統設計的局限性
在傳統造型概念設計過程中,設計師通過頭腦風暴、聯想、比擬、仿生等思維創作汽車造型,產生出概念方案,選定方案效果圖后根據效果圖在三維軟件如Alias中搭建汽車三維模型,此過程稱為汽車CAS設計階段。在此階段經常會進行方案調整或者衍生出其他方案,但CAS設計師通過Alias軟件等手動調整方案或者搭建衍生方案時往往需要重新建模,耗費大量時間與精力,而設計師在等待CAS模型修改的時候也容易淡化創作靈感,創作思維不連續。
(2)參數化設計的優勢
參數化設計方法主要在CAS模型階段進行,通過構建邏輯規則,將主要的造型特征變量用參數驅動,通過更改參數可即時生成三維模型,并衍生出多個造型方案,模型具有逆向可調性,極大地縮減CAS模型搭建時間;同時設計師可直觀觀察對比各個衍生方案的優缺點,進行選擇或者二次創作,設計靈感不再隨機、創作思維得以連續。
參數化設計解決了傳統造型設計遇到的瓶頸,最重要的意義在于提高了效率,降低了成本,縮短了CAS建模時間,拓展了造型設計思路,有利于突破汽車造型的現有局面。
1.2 參數化設計工具介紹
目前參數化設計工具主要有Grasshopper、Dynamo等,其中Grasshopper功能強大、穩定性好,本文作者采用Grasshopper進行參數化模型搭建。
Grasshopper(下文簡稱GH)是一款在犀牛軟件環境下運行的采用程序算法生成模型的插件,是目前比較流行的參數化設計工具。GH把相關功能封裝在一個運算器內,這些運算器又稱為“電池”。GH將編程節點可視化,設計人員只需對運算器輸入某些參數,就可以得到相關結果,降低了設計人員的學習成本,不過仍需相關設計人員具有編程知識。打開犀牛軟件加載GH插件后的界面如圖2所示,運算器連接起來的圖也稱之為“電池圖”。
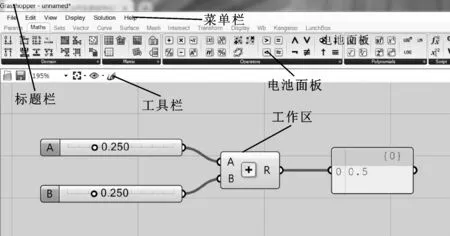
圖2 GH界面
使用某個運算器時直接將運算器從面板中拖入工作區,點擊運算器兩側的半圓可以將各個運算器連接起來,如圖2所示為加法運算器,左側A和B為輸入端,右側為輸出端,輸出運算后結果。
2 格柵CAS模型參數化設計
汽車前格柵作為汽車前臉造型非常重要的部件,在造型設計中一直處于十分重要的地位,很多車型的家族化特征主要由其前格柵定義,如雷克薩斯紡錘形前格柵、寶馬雙腎形前格柵。
點陣式格柵是前格柵的常見形式,一般由基本的造型單元通過復雜的排列組合實現,如沿二維平面分布、圍繞中心布置、旋轉縮放等,此類排列組合是有規律的,可以通過調節某些參數實現。下面通過某個點陣式前格柵的建模簡述通過GH實現參數化設計的過程。
2.1 格柵參數化設計邏輯分析
圖3為點陣式前格柵的方案圖,可以看出,基本造型單元為一個梯形體,除了中間部分其他造型單元均有規律排列,通過陣列可以在平面上實現。但一般前格柵造型單元空間排列都比較飽滿,側面看是向外鼓出的,基本造型單元趴在一張空間立體面上,采用常規建模方法在平面陣列完成后,仍需要手動或者通過其他方式將其排列到空間位置,耗費很多時間;在推敲此方案時,如增多幾行幾列或者排列角度再變化一些,手動建模繁瑣耗時。

圖3 前格柵效果圖分析
經過分析,正面看,造型排列如圖3中虛線所示,基本的梯形造型單元可以在Alias中手動完成,造型單元排列比較復雜,趴在了一張空間曲面上,在GH中實現比較方便,基本邏輯順序見圖4。
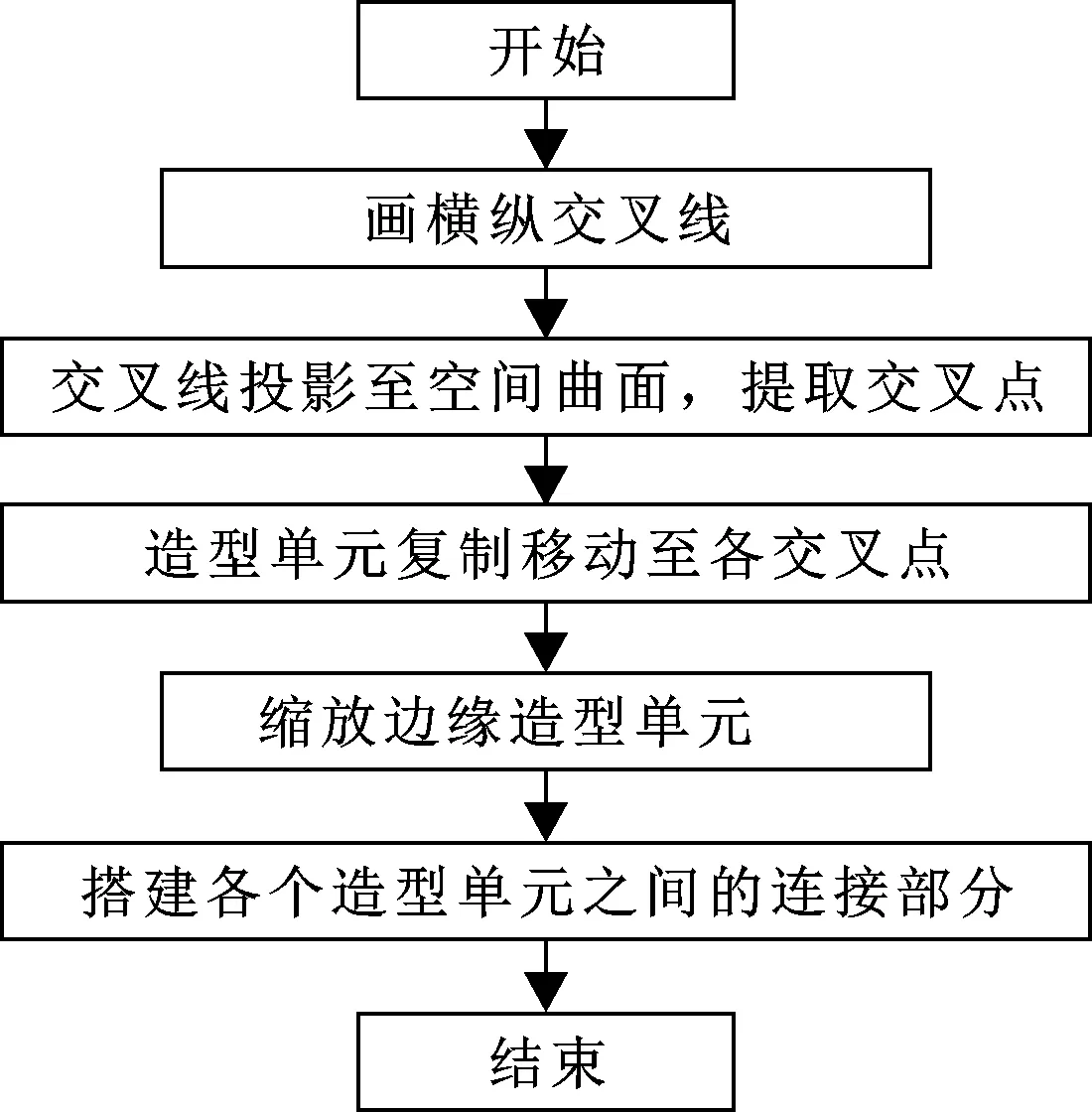
圖4 格柵參數化設計邏輯
下文即按圖4中邏輯順序在GH中一步步搭建出格柵。
2.2 畫縱橫交叉線
通過3個點畫出一條NURBS曲線,作為橫條,按Z方向陣列(Linear Array運算器)6個,同理做出豎條并陣列,陣列后每根豎條曲線繞著一端端點轉動(Rotate 3D運算器)某個角度,離Y0線越遠的曲線轉動角度越大,每個線的轉動角度可由等差數列實現,電池圖如圖5所示,“犀牛”里生成的曲線如圖6所示。
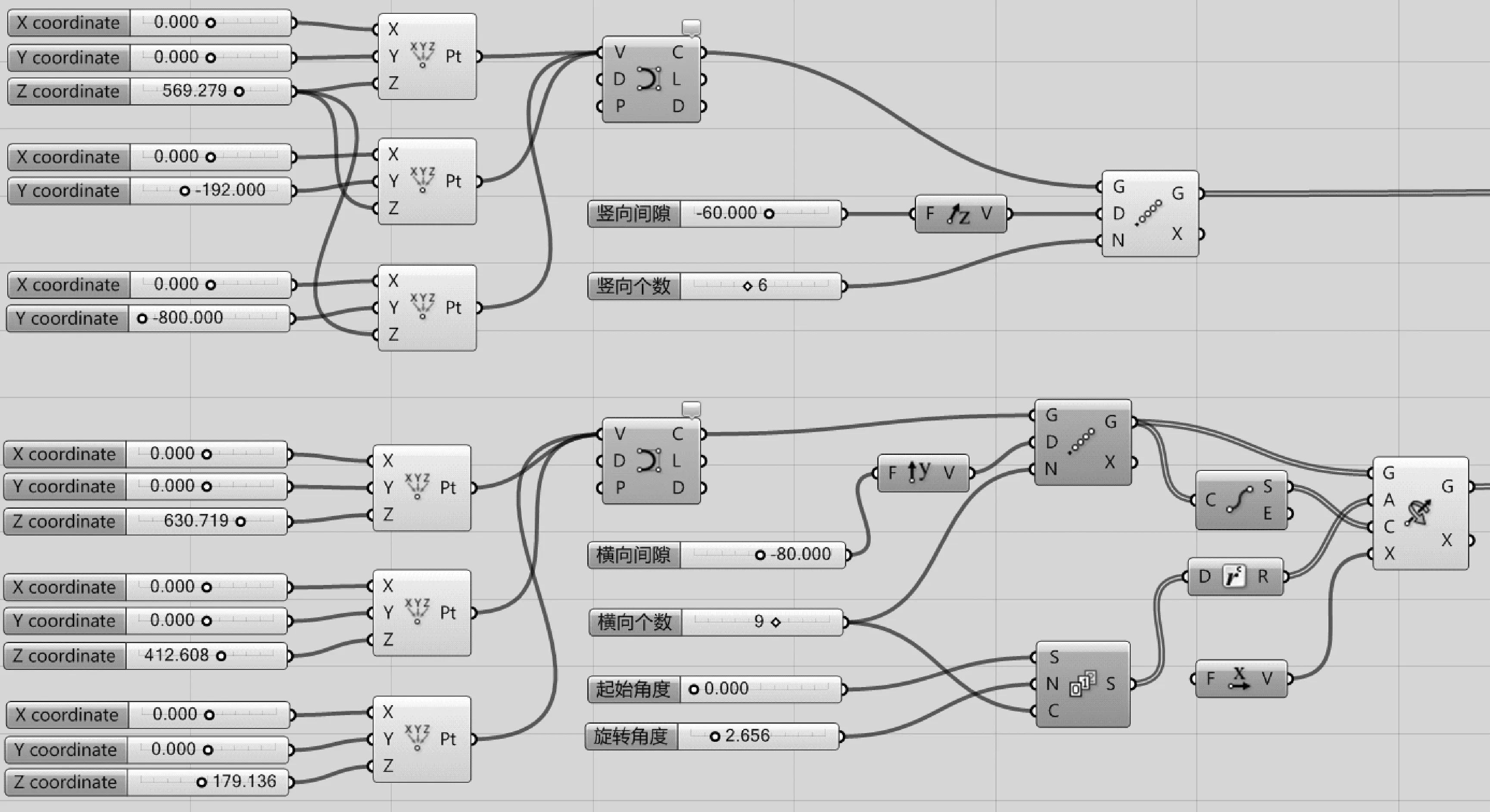
圖5 畫縱橫交叉線電池圖
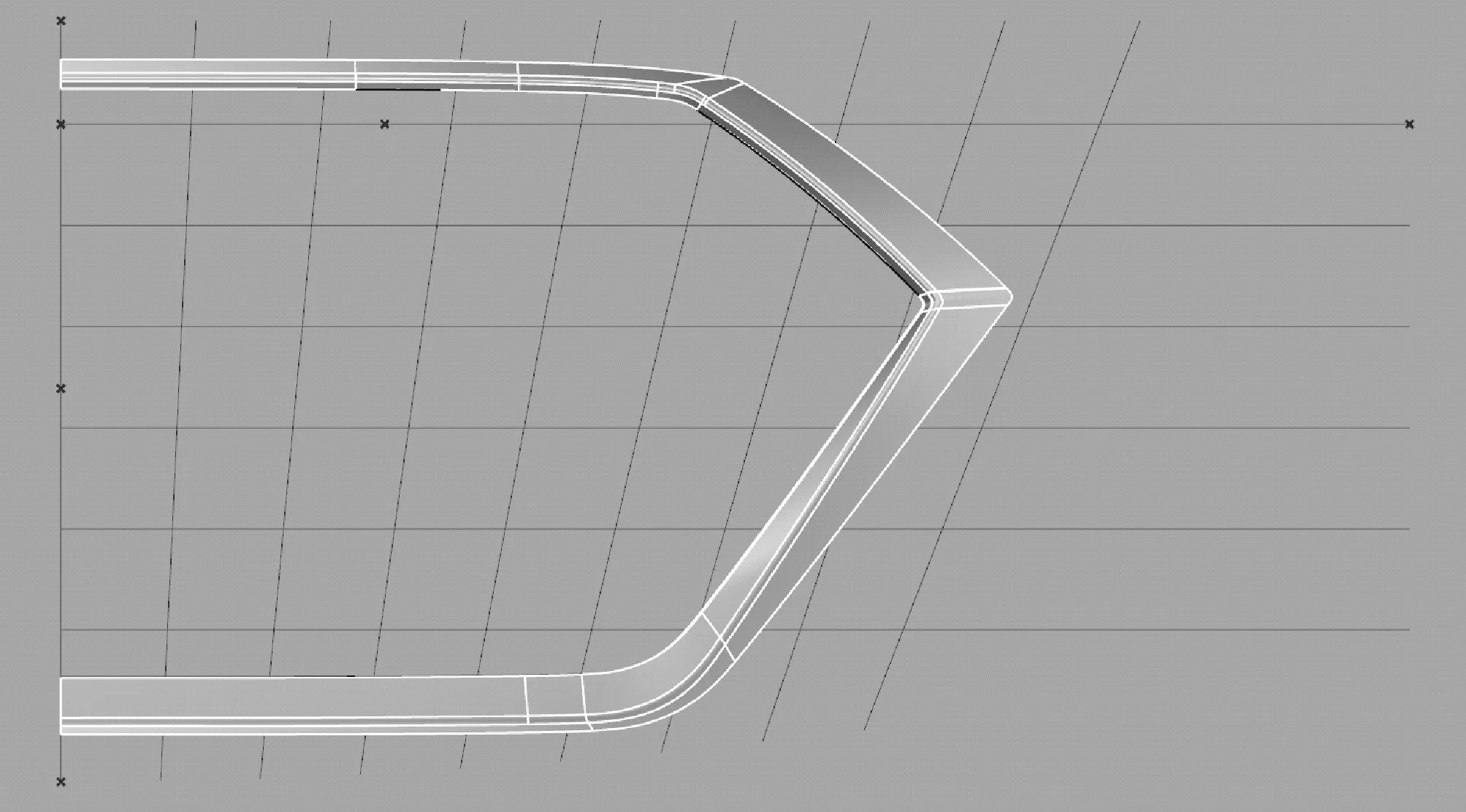
圖6 “犀牛”里中生成的縱橫交叉線
2.3 交叉線投影至空間曲面,提取交叉點
將上一步中生成的橫縱線投影至指定的曲面,提取交點,用Point List運算器可顯示各個點的編號,再使用分流運算器(Dispatch),輸入端P的參數為布爾值TRUE、FALSE,即第0個點對應TRUE,分流至輸出端A;第1個點對應FALSE,分流至輸出端B;第2個點對應TRUE,分流至輸出端A;第3個點對應FALSE,分流至輸出端B。以此類推,從中篩選出想要的點,作為格柵每個造型單元最后要移動到的位置點。此案例中要用到的點為A端輸出的點,即序號為0、2、4、6、......的偶數點。相關電池圖見圖7,犀牛里生成的圖像見圖8。
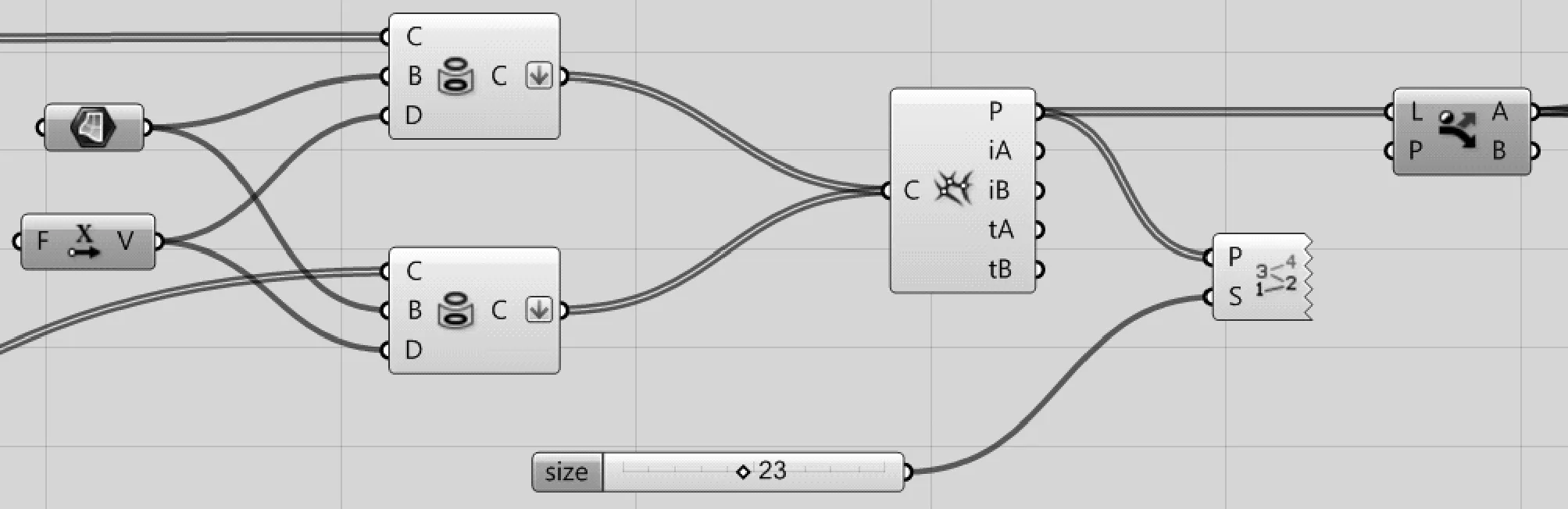
圖7 投影并提取交叉點電池圖
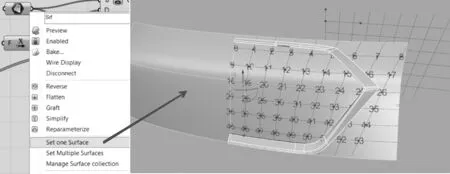
圖8 投影并提取交叉點后的模型
2.4 造型單元復制移動至各交叉點
找好造型單元要移動到的位置點后,把造型單元復制移動到對應的位置點即可,但在實現復制移動前,為了方便調整,此處增加兩項功能:(1)縮放功能,即圖9中A區域電池圖,對應圖10(a);(2)移動功能,即圖9中B區域電池圖,對應圖10(b),以后可通過調整此處,實現整體排列多樣化。GH中移動物體需要指定移動向量,圖9中C區域的提取向量起始點對應圖10(c),Vector 2P運算器將C區域提取的向量起始點與圖8篩選后的點合成移動向量,之后造型單元(見圖11)按這些向量移動即完成復制移動,生成格柵主體。圖9中D區為顯示向量,對應圖12中箭頭,圖9中E區為移動運算器,對應圖12中造型單元。
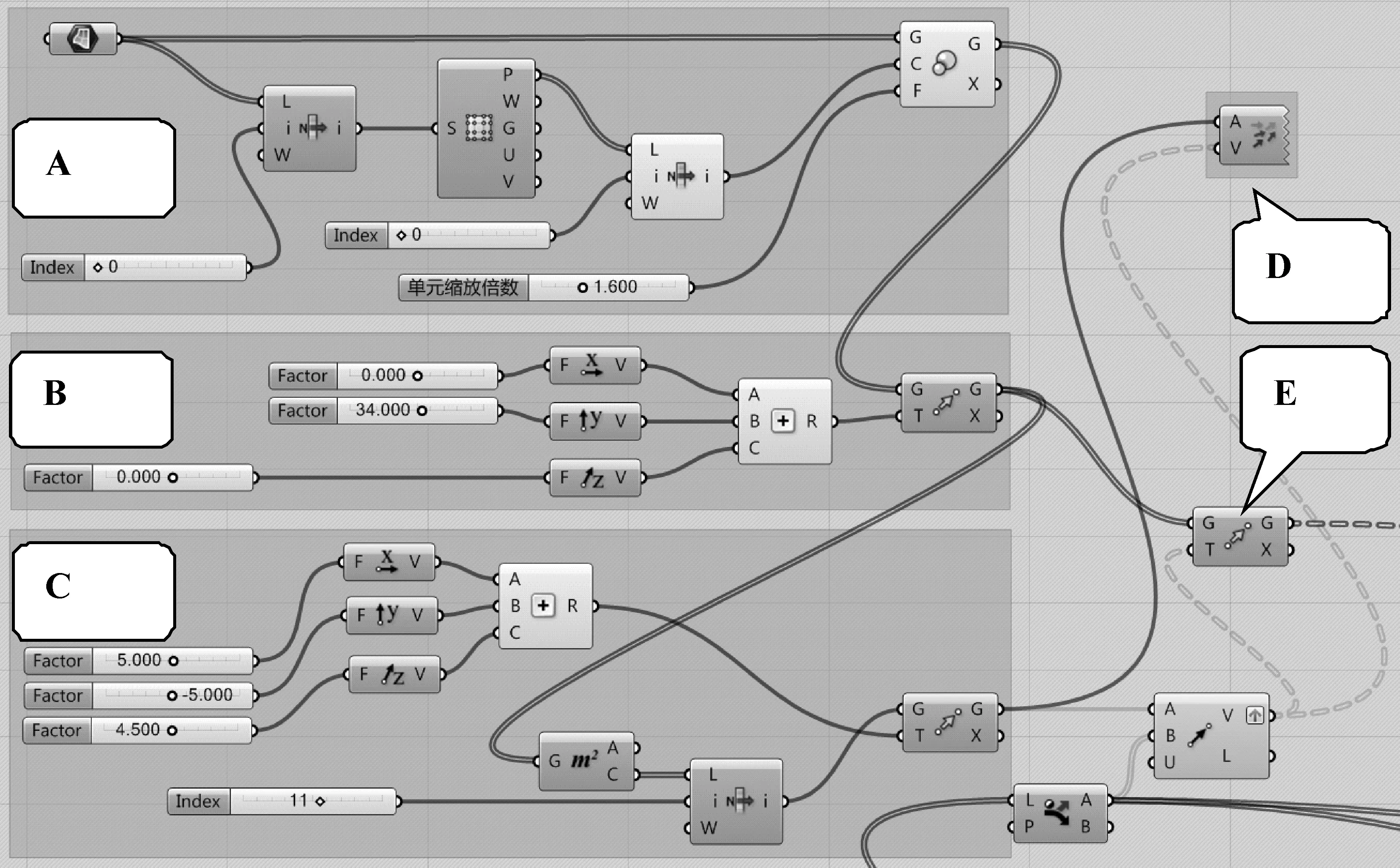
圖9 造型單元復制移動至各交叉點電池圖
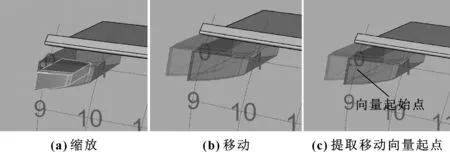
圖10 A,B,C區域電池圖模型
圖11 選取基本造型單元

圖12 復制移動造型單元
2.5 縮放邊緣造型單元
效果圖中為越接近格柵邊框的造型單元越小。可以提取格柵邊框上的線,稱之為干擾曲線,依次計算每個造型單元位置點到這條線的距離,以此距離除以某個合適的數值,作為各自造型單元的縮放倍數。為保證不至于縮放過于夸張,此處使用Minimum運算器和Maximum運算器將縮放比例限制為0.58~1,電池圖見圖13,生成的效果見圖14。
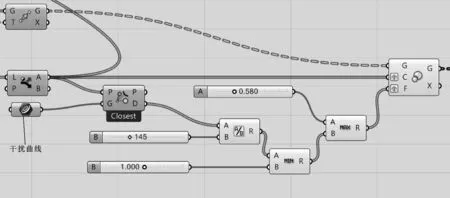
圖13 縮放邊緣造型單元電池圖
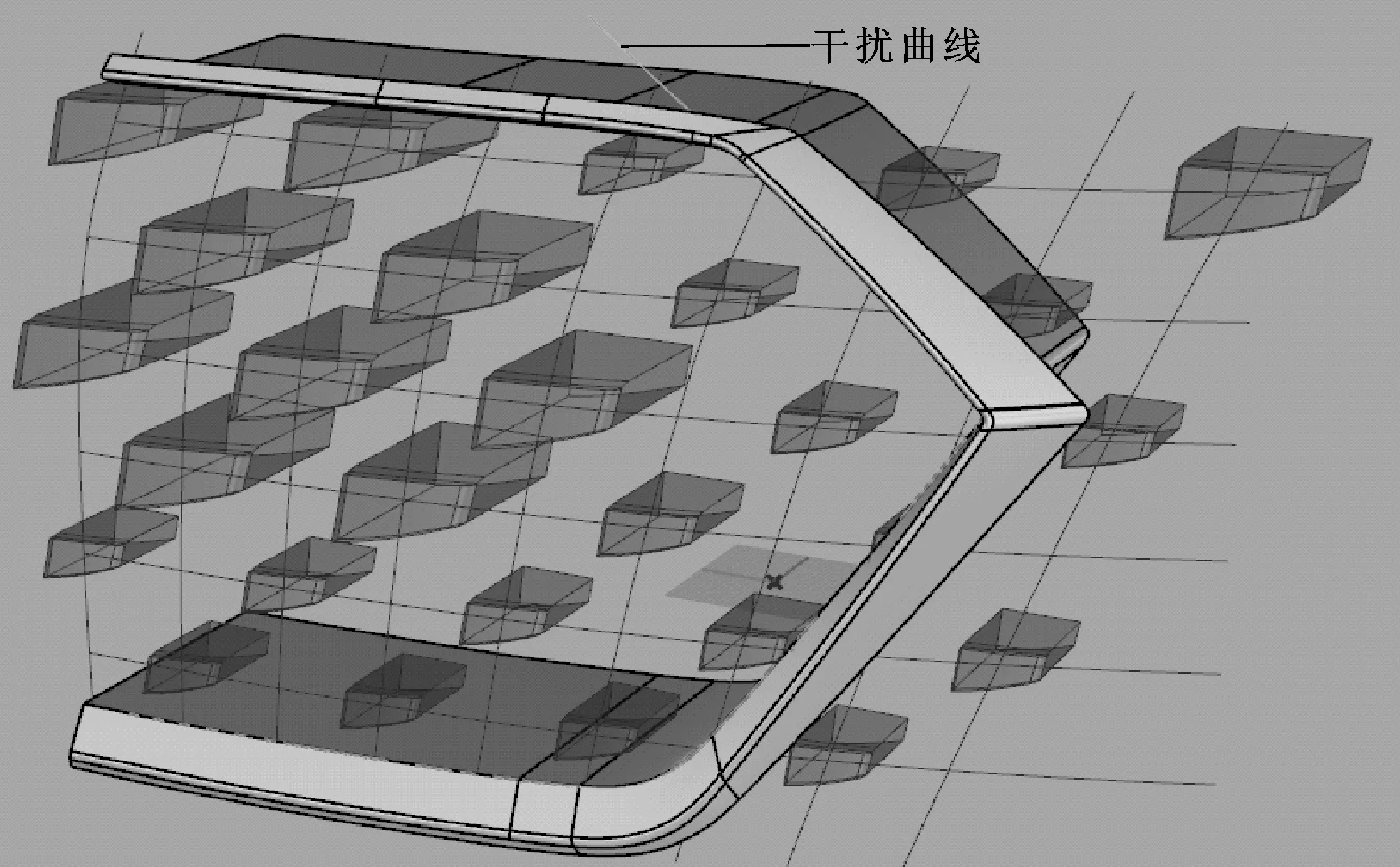
圖14 縮放后的模型
2.6 搭建各個造型單元之間的橋連部分
做各個造型單元之間的橋連部分。橋連分橫豎兩部分,此處闡述橫向橋連做法,豎向橋連做法一致,只是參數需要調整。橫向橋連基本思路為先畫出兩兩單元間的連線,觀察圖15可得,序號為0的造型單元右邊的點連接序號為1的造型單元左邊的點,需要提取兩組點,一組造型單元右邊的點,一組左邊的,兩組點提取過程一致,但兩點連線時須錯開一位造型單元(Shift運算器),見圖16,否則出現圖17所示情況。
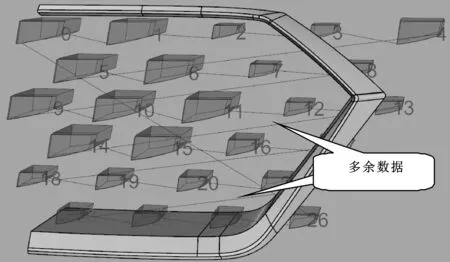
圖15 搭建好的橋連曲線

圖16 搭建橋連曲線電池圖

圖17 未錯開的橋連曲線
看圖15可得,每行換行處以及一頭一尾處出現了多余的數據,其長度明顯長于所需要的數據。此處進行分流,剔除較長的線,保留想要的線段,同時拉伸相關曲面做出完整的橋連結構,具體電池圖如圖18所示,同理調整相關數值做出豎向的橋接曲面,可得最后的結果如圖19所示。
至此,格柵主體部分已經完成,整理后如圖20所示,若要變化格柵行列數或者旋轉角度等通過調整相關參數即可,程序幾秒內自動輸出結果,相比在Alias里手動搭建格柵主體效率提升明顯,同時變化多端而又豐富規律的造型也激發設計人員的創作靈感,拓展了設計思路。圖21為通過調整不同參數衍生出的拓展方案。格柵主體在GH中創建,格柵邊緣裁剪部分在Alias中處理。
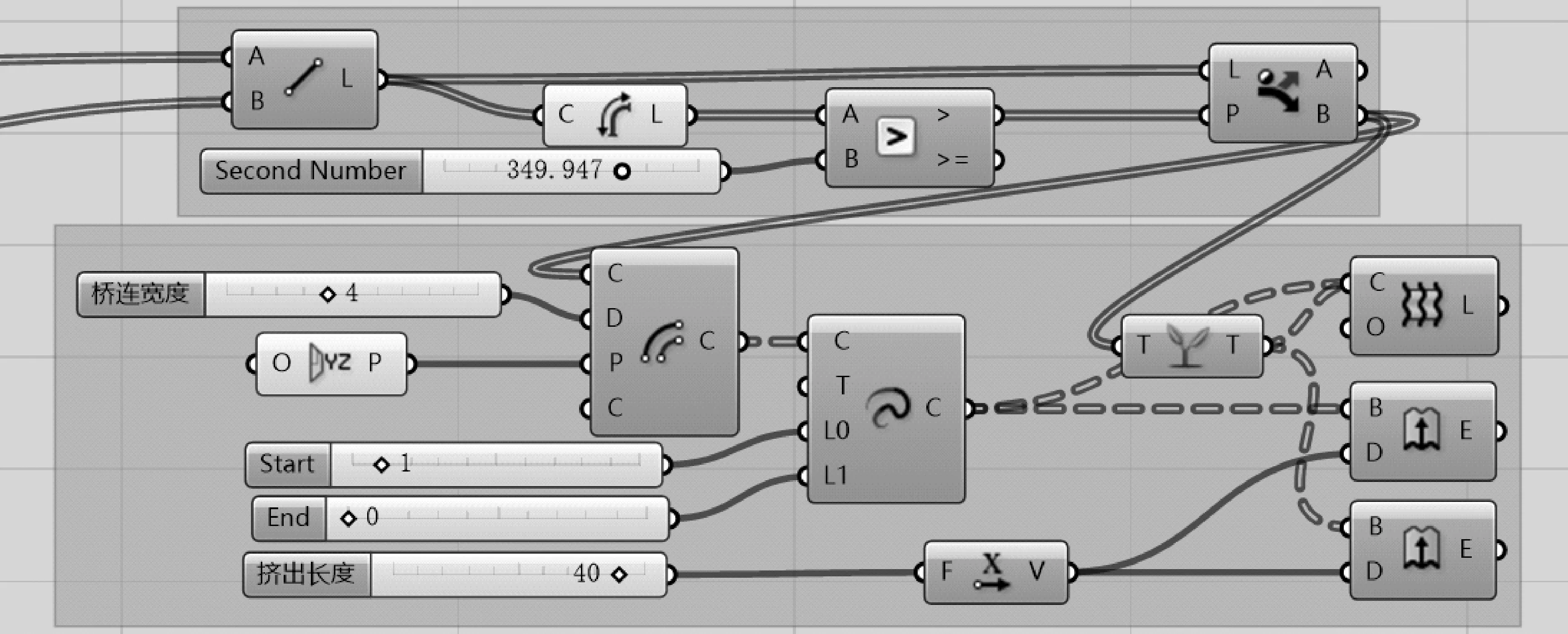
圖18 搭建橫向橋連曲面及擠出曲面
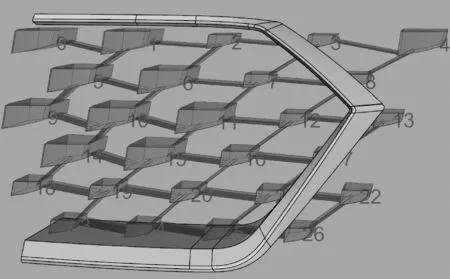
圖19 最終格柵
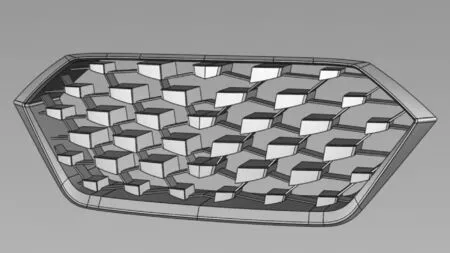
圖20 整理后的格柵模型
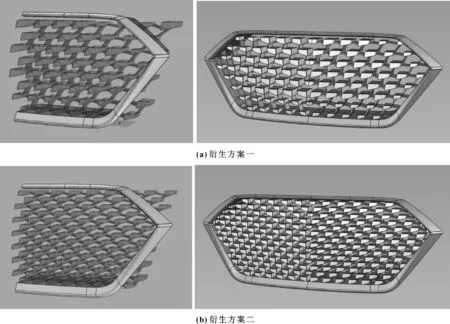
圖21 調整參數后的衍生格柵模型
3 結束語
運用參數化設計工具Grasshopper,給出點陣式格柵一般參數化建模思路和方法。在此基礎上應不斷創新,緊跟市場流行設計趨勢,及時高效地開發出具有未來感科技感的新造型方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03