某微型電動汽車麥弗遜前懸架設計優化
2020-03-30 02:26:36高坤明郭宗和于瑤瑤張裕晨
山東理工大學學報(自然科學版) 2020年3期
關鍵詞:優化
高坤明,郭宗和,于瑤瑤,張裕晨
(1.山東理工大學 交通與車輛工程學院, 山東 淄博 255049;2. 山東理工大學 材料科學與工程學院, 山東 淄博 255049)
隨著我國經濟和技術的不斷發展,微型電動汽車以其獨特的經濟性和實用性,吸引了眾多消費者對汽車市場的關注,特別是近些年,中國微型電動汽車的生產和銷量經歷了突飛猛進的增長。但是由于微型電動汽車的設計和制造成本有限,如何在保證微型電動汽車經濟性的基礎上,實現更高性能的設計是微型電動汽車的重要課題。目前,國內外很多學者致力于微型電動汽車懸架系統的性能優化[1-3],其中麥弗遜懸架以簡單的結構設計、良好的操縱性能以及較小的占用空間成為微型電動汽車最常用的前懸架結構之一。近些年,國內外學者對麥弗遜懸架進行了更加深入的研究[4-6],上官文斌等[7]建立了一種基于麥弗遜懸架的1/4汽車模型,分別將PID控制和開關天棚控制應用于模型中,驗證了模型的正確性。為解決微電動汽車麥弗遜懸架系統優化過程中多個目標的沖突性問題,多目標優化控制方法被廣泛應用于麥弗遜懸架的設計優化過程[8-10],馬娜等[11]以基準車輛的前束角、外傾角和側向滑移量為設計目標,運用響應面法對懸架導向機構的硬點位置參數進行多目標優化設計,提高了電動汽車操縱穩定性和乘坐舒適性。隨著群體仿生進化算法的發展,一些隨機搜索方法被廣泛應用到汽車懸架的優化設計中,其中遺傳算法[12-13]在懸架優化中的應用尤為廣泛,梁永勤等[14]運用Adams/Insight對懸架參數進行了靈敏度分析,運用遺傳算法對該懸架系統進行優化,改善了懸架的運動特性。
本文以某微型電動汽車麥弗遜前懸架為實例,結合虛位移原理推導出懸架彈簧剛度的求解公式,分析前穩定桿所受到的彎曲應力和扭轉應力,推導并計算麥弗遜前懸架側傾角剛度,并通過多目標遺傳算法對麥弗遜懸架參數進行仿真和驗證。
1 懸架參數設計計算
1.1 懸架線剛度
懸架的線剛度是車輪保持在地面前提下車廂作垂直運動時,單位車廂位移下,懸架系統給車廂的總彈性恢復力。偏頻是懸架系統的重要參數,偏頻的大小直接影響乘客的乘坐舒適性,因此選取一個合理范圍的偏頻,可以達到乘坐舒適性和行駛穩定性的目的。由偏頻可以計算出懸架線剛度,即
ka=(2·π·n)2·m
(1)
式中:ka為懸架線剛度;n為偏頻;m為前懸架滿載簧載質量。
1.2 彈簧剛度
懸架的彈簧剛度是懸架設計過程的重要參數之一,正確求解彈簧剛度是懸架設計的關鍵。虛位移原理是解決力學問題的一種方法,利用虛位移原理可以更準確地求解懸架的彈簧剛度。
麥弗遜懸架系統可以看做是一個具有理想約束的質點系,作用于質點系的所有主動力在任何虛位移所作虛功之和等于零即可使得系統平衡。
∑Fi·li=0
(2)
在麥弗遜懸架系統中,某輪胎接地點等效剛度和懸架彈簧線剛度的關系由懸架某時刻瞬心位置確定,通過瞬心的位置可以求得各個主動力在虛位移上所作的虛功。麥弗遜懸架某時刻的瞬心由三心定理作圖求得,其剛度計算示意圖如圖1所示。

圖1 麥弗遜懸架剛度計算示意圖Fig.1 Schematic calculation diagram for McPherson suspension stiffness
圖1中:a點為車輪輪轂和三角擺臂連接的球鉸運動副;b點為三角擺臂的兩個襯套與車架之間連接的等效點,是與空間直角坐標系yoz平行的平面和穿過擺臂球鉸與兩襯套中心連線相交的交點;c點為阻尼器和螺旋彈簧的上支座支撐點;d點為螺旋彈簧下支座支撐點。由三心定理可知,通過c點作螺旋彈簧中心線的垂直線與ab兩點連線的延長線的交點M即為懸架在某一時刻的瞬心。車輛軸線和輪胎接地點到瞬心連線的交點即為懸架的側傾中心R。
由虛位移原理可知,在麥弗遜懸架系統中所有主動力所做虛功之和等于零,即
W1+W2=0
(3)
其中:
W1=F1·l1·dθ·cosα
(4)
W2=-F2·l2·dθ·cosβ
(5)
式中:
F1=ka·l1·dθ·cosα
(6)
F2=ks·l2·dθ·cosβ
(7)
則可以求得一側螺旋彈簧的線剛度為
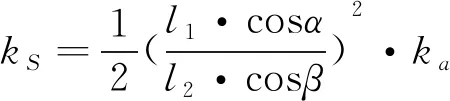
(8)
1.3 橫向穩定桿的線剛度
橫向穩定桿結構如圖2所示,當汽車轉彎時,穩定桿扭轉并變形,穩定桿各段變形產生的能量分別為:lT和l1段的扭轉位能U1、U2,l4、l1、l2、l0段的彎曲位能U3、U4、U5、U6以及橡膠支座的變性能,且
U1=F2l2lT/4GJP
U2=F2l52l1/4GJP


F2l2(l22+3l2l3+3l32)/6EJ


(9)
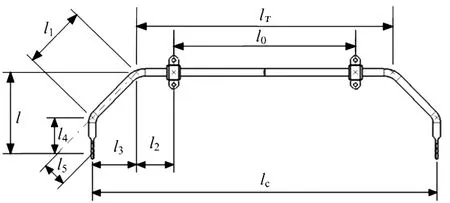
圖2 橫向穩定桿結構示意圖Fig.2 Structural diagram of stabilizer bar
因此可以求得由穩定桿各段桿件引起的一側變形為

(10)
又由于穩定桿橡膠支座是彈性體,在汽車轉向時會產生一定的變形,引起穩定桿端點處產生一定的變形,通過力偶平衡和力與橡膠支座剛度關系可以求得橡膠支座的變形位移為Δb=Flc/l0c0,其中c0為橡膠支座徑向剛度。由三角形相似可以求得由橡膠支座變形引起的穩定桿一端變形為Δ2=Flc2/l02c0,由此可以計算得到整個穩定桿的變形為Δ=2(Δ1+Δ2)。從而可以得到橫向穩定桿的線剛度為
(11)
根據虛位移原理可以求得穩定桿輪胎接地點等效剛度計算公式為
(12)
式中:c為穩定桿下球銷中心到瞬時轉向中心的水平距離;p為輪胎接地點到瞬時轉向中心的水平距離。
1.4 前懸架側傾角剛度計算
懸架側傾角剛度是汽車的重要參數之一,體現了汽車轉彎時的轉向及操縱穩定性,它由兩部分組成:橫向穩定桿角剛度和螺旋彈簧角剛度,計算公式如下:
(13)
式中,B為麥弗遜懸架輪距。
1.5 減震器參數計算
減振器的阻尼系數是影響汽車舒適性的重要參數,阻尼器中阻尼力F與振動速度v之間的關系為
F=δv
(14)
式中,δ為減振器阻尼系數。
在行駛過程中,車身與車輪產生相對位移,懸架阻尼器起作用,車身的振動模式為周期性衰減振動,相對阻尼系數ψ的大小用于評價振動衰減的快慢程度,ψ的表達式為
(15)
式中:C為懸架系統剛度;ms為簧載質量。
懸架阻尼系數δ為
δ=2ψmsω
(16)

2 麥弗遜懸架系統模型
本文采用1/4的車身與車輪兩自由度振動系統懸架模型,模型如圖3所示。
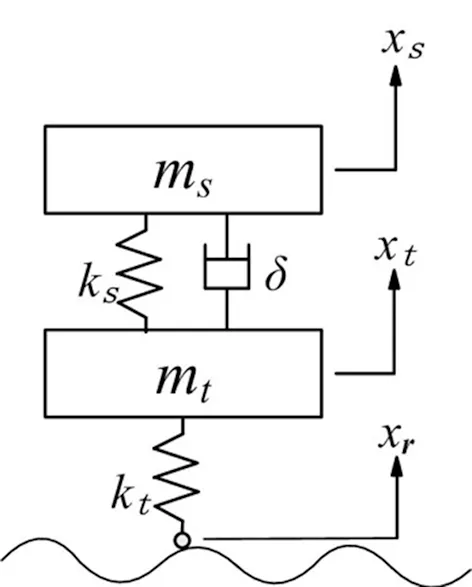
圖3 二自由度1/4汽車模型Fig.3 The 2-DOF model of quarter-vehicle body
圖3中,ms和mt分別為簧載質量和非簧載質量,輪胎等效為一個剛度為kt的彈性體,懸架由螺旋彈簧ks和δ阻尼組成,xs、xt和xr分別為車身位移、輪胎位移和路面隨機激勵。
根據牛頓第二定律,可以建立懸架系統的微分方程。懸架系統動態模型如下:

將懸架系統模型的狀態變量定義為
x=[x1,x2,x3,x4]T

南太平洋溫暖的海水中蘊藏著大量的營養物質,這也是飛魚選擇在熱帶及暖溫帶水域生活的原因。經過一個月左右的時間,小飛魚已經長大了不少。它們逐漸強壯起來,尾鰭擺動的力量增強了,游泳的速度也越來越快。這個時候,淺海區的浮游生物已經無法滿足它們生長的需要。小飛魚必須離開珊瑚礁“幼兒園”,到更廣闊的大海里去尋找食物。
則系統的狀態方程為
3 多目標優化設計
3.1 目標函數選擇
對微型電動汽車麥弗遜懸架進行優化時,既要考慮車輛的乘坐舒適性,還要考慮車輛的行駛穩定性。車身垂直加速度和懸架動行程是評價汽車乘坐舒適性的重要指標,在懸架動行程不超過極限要求的前提下,選擇盡可能小的車身垂直加速度可以極大改善汽車的乘坐舒適性。同時車輪與地面之間的動位移直接影響車輪與地面的附著效果,可以通過降低車輪動位移改善汽車的行駛穩定性,目標函數如下:
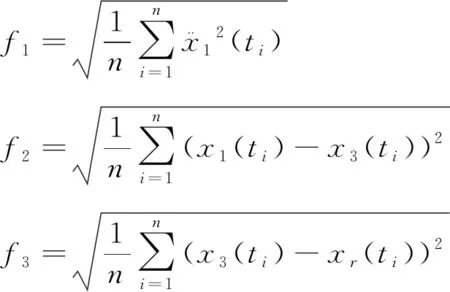
式中,f1、f2和f3分別為車身垂直加速度的均方根、懸架動行程的均方根和輪胎動位移均方根。
多目標優化方法的關鍵是解決目標之間的矛盾性,使多個目標能夠達到均衡最優,在麥弗遜懸架的優化過程中,多個目標之間存在沖突,車身垂直加速度的優化將不可避免地導致懸架動行程和輪胎動位移性能的損失,因此多目標優化方法的應用尤為重要。
同時懸架側傾角剛度也是汽車行駛穩定性的重要參考指標,側傾角剛度過大或者過小都不好,當側向慣性力等于車重的2/5時,要求車身側傾角在2.5°~4°之間。
3.2 多目標優化問題的提出
多目標優化是多準則決策的一個領域,即涉及多個目標的數學問題的同時優化。由懸架數學模型可知,懸架設計優化的實質是具有多個變量及各類約束的非線性優化問題,電動汽車的乘坐舒適性和行駛穩定性由麥弗遜懸架中的3個參數K=[ks,δ,cw]所決定,通過選擇這些參數的取值來滿足3個目標,同時根據麥弗遜懸架的3個參數可以將多目標優化設計問題寫成函數

合適的適應度函數可以顯著增加算法的收斂速度,各目標函數值滿足約束條件下盡可能小是主動懸架優化問題所要實現的,所以直接將多目標函數轉化為適應度函數即可獲得較好的效果,適應度函數可表示為
Fit(K)=min{f1,f2,f3}
3.3 多目標遺傳優化算法
利用進化算法求解多目標優化問題是近年來的研究熱點,遺傳算法將問題參數編碼為染色體,然后通過迭代過程實現選擇、交叉和變異,不斷更新新的個體和種群,最終獲得滿足優化目標的染色體。在優化過程中調用遺傳算法運行程序,整個優化程序的流程如圖4所示。
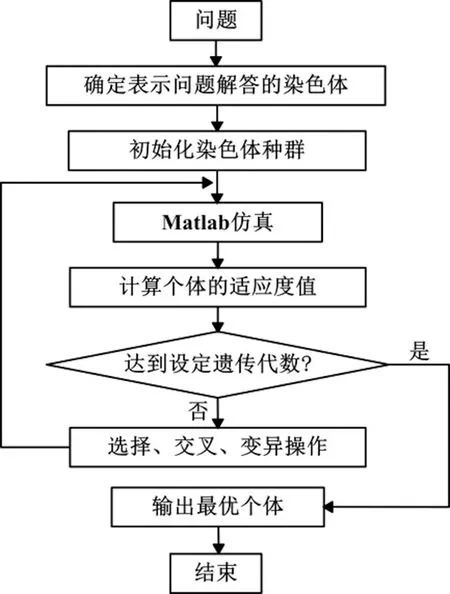
圖4 遺傳算法優化流程Fig. 4 Process of genetic algorithm optimization
1)染色體編碼
將優化模型的3個變量依次連接成編碼串,每個編碼串代表種群中的1個個體,每一個個體都是可行解,初始種群數量設為100。
2)選擇、交叉和變異
選擇是為了從當前迭代群體中找到更加優秀的個體,并且使這些個體有更大的幾率遺傳到下一代,選擇概率設定為0.9。
交叉是將優秀的個體進行結合,使其在迭代過程中能夠更大概率地產生優秀個體,交叉概率設定為0.8。
變異可以保證種群的多樣性,通過變異能夠生成不同于父輩的新個體,變異概率設定為0.02。
3)終止條件
終止條件是用于實現遺傳算法迭代終止的條件,通過終止條件,算法程序自動停止,并輸出結束時的最優解,最大迭代次數設為300。
在應用多目標遺傳算法對麥弗遜懸架進行參數優化時,選擇參數K的取值范圍如下:
在Matlab下建立仿真程序,仿真時間為15 s,多目標最優解如圖5所示。
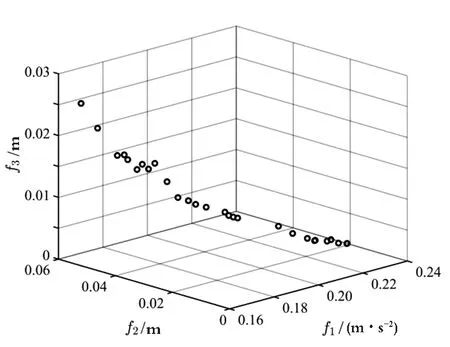
圖5 多目標最優解分布圖Fig.5 Distribution of multi-objective optimal solutions
4 仿真結果分析
為驗證所設計的多目標遺傳算法的可靠性,對某微型純電動汽車進行實例仿真,其中ms=175 kg,mt=49 kg,kt=190 000 N/m,懸架動撓度xR=0.08 m,根據實際需求初定前懸架滿載偏頻為1.36 Hz。將初定前懸架滿載偏頻帶入公式(1)~(8)可以求得螺旋彈簧線剛度為14 300 N/m,由公式(9)~(11)可以求得橫向穩定桿的線剛度為44 540 N/m,由公式(14)~(16)可以求得麥弗遜前懸架減振器阻尼系數為968.5N/(m/s)。
本文采用Deshpande[15]提出的隨機路面函數方程,表達式如下:
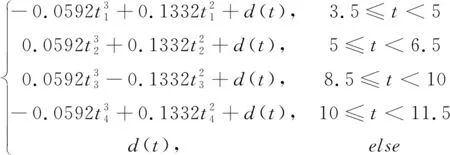
根據已建立的模型和算法,在上述路面條件下進行Matlab仿真,將優化后的麥弗遜懸架與優化前的懸架進行比較,仿真結果如圖6~8所示,優化參數和目標值對比見表1和表2。
從仿真結果中可以看出,采用多目標遺傳算法對麥弗遜懸架優化后,車身的垂直加速度、懸架動行程和輪胎動位移均在一定程度上得到了改善,同時麥弗遜前懸架側傾角數值在合理的范圍內。從圖6和表2可以看出,與優化前的麥弗遜懸架相比,優化后懸架的車身垂直加速度的均方根值減少了29.2%,有效提高了汽車的乘坐舒適性;由圖7和表2數據可以看出,懸架動行程保持在限位要求的0.08 m之內且均方根值減少了22%,降低了彈簧支座撞擊限位塊的風險;由圖8和表2可以看出,輪胎動位移的均方根值減少了 15.8%,有效改善了汽車輪胎的抓地能力,減少了側向力的產生,從而提高了汽車的行駛穩定性。
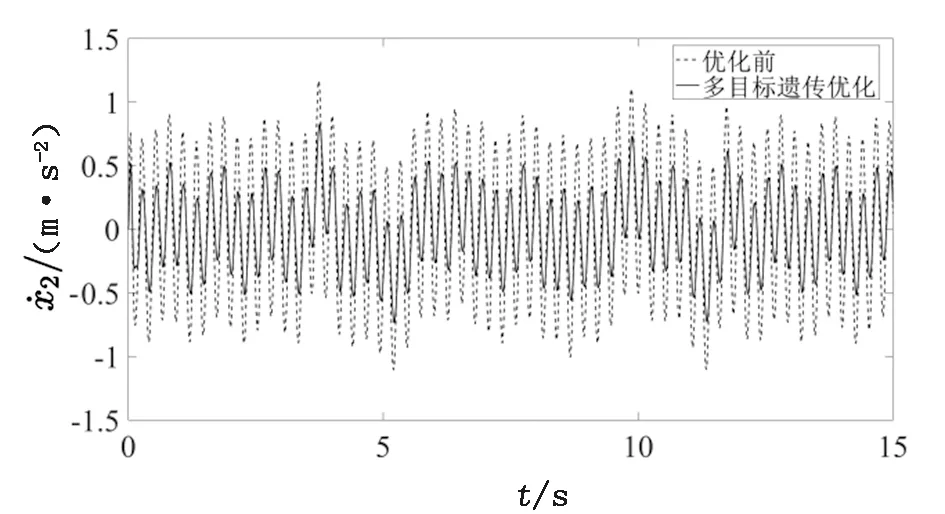
圖6 車身垂直加速度對比曲線Fig.6 Vertical acceleration curve of the vehicle body
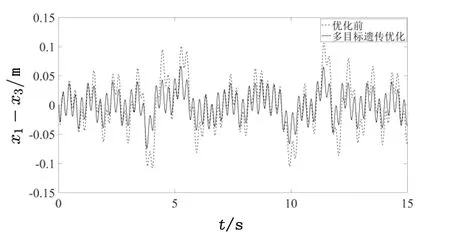
圖7 懸架動行程對比曲線Fig.7 Suspension travel comparison curve
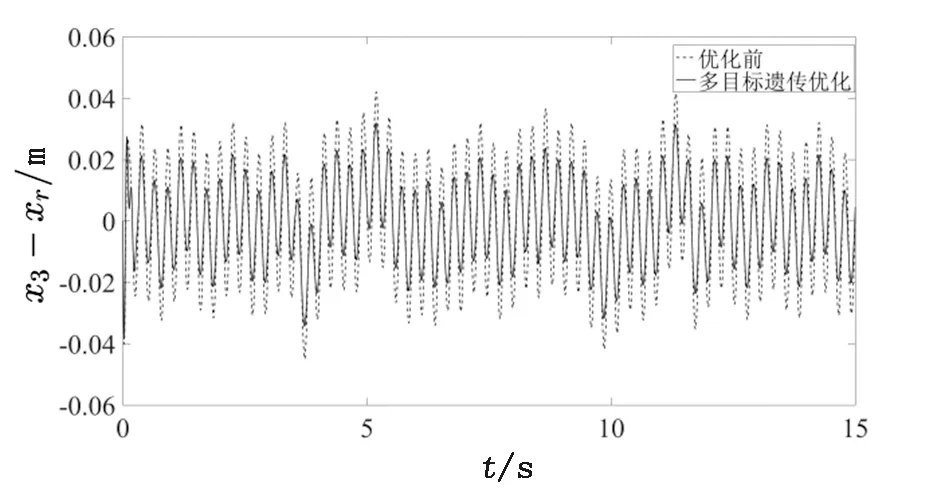
圖8 輪胎動位移對比曲線Fig.8 Tire dynamic displacement curve
表1 優化前后懸架參數
Table.1 Suspension parameters before and after optimization
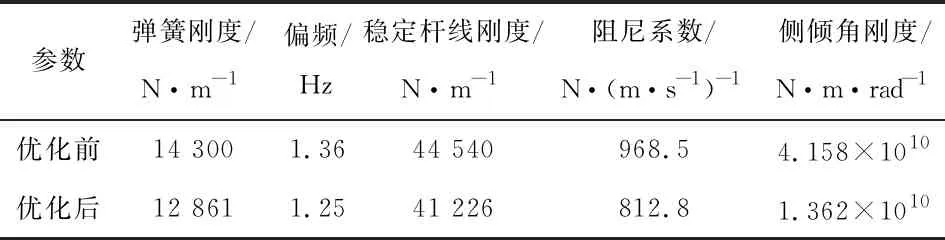
參數彈簧剛度/N·m-1偏頻/Hz穩定桿線剛度/N·m-1阻尼系數/N·(m·s-1)-1側傾角剛度/N·m·rad-1優化前14 3001.3644 540968.54.158×1010優化后12 8611.2541 226812.81.362×1010
表2 優化前后目標值
Tab.2 Target value before and after optimization

目標值f1/(m·s-2)f2/mf3/m側傾角/(°)優化前0.7680.0860.0380.86優化后0.5440.0670.0322.93
5 結束語
本文結合虛位移原理推導出麥弗遜懸架彈簧剛度和穩定桿線剛度,計算了麥弗遜前懸架側傾角剛度和減振器阻尼系數,建立了汽車1/4懸架物理模型,并運用多目標遺傳算法對麥弗遜懸架系統進行了參數優化。仿真結果表明,與優化前的麥弗遜懸架相比,車身垂直加速度明顯減小,懸架動行程和輪胎動載荷也得到了改善,減振效果顯著,提高了汽車的乘坐舒適性和行駛穩定性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45