基于RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制研究
2020-03-30 02:26:36夏志成鄒廣德
山東理工大學(xué)學(xué)報(自然科學(xué)版) 2020年3期
關(guān)鍵詞:結(jié)構(gòu)模型
夏志成,鄒廣德,董 威
(山東理工大學(xué) 交通與車輛工程學(xué)院, 山東 淄博 255049)
防抱死制動系統(tǒng)是汽車上最重要的主動安全裝置之一。當(dāng)汽車在行駛過程中遇到緊急情況時,駕駛員通常會猛踩制動踏板以期望獲得最強的制動效果,但對裝備常規(guī)制動器的汽車,它的4個車輪很快會處于“抱死”狀態(tài),即車輪不再滾動,而是在路面上拖滑,結(jié)果不但不能帶來最佳的制動效果,而且由于車輪被抱死,汽車不能實現(xiàn)轉(zhuǎn)向,在非對稱附著系數(shù)的路面上極易喪失直線行駛穩(wěn)定性,從而發(fā)生側(cè)滑、甩尾及急轉(zhuǎn)等危險現(xiàn)象。ABS系統(tǒng)能把車輪的滑移率控制在一定范圍內(nèi),可充分利用輪胎與路面之間的附著力,發(fā)揮制動器的制動性能,提高制動減速度、縮短制動距離,并能有效提高汽車的方向穩(wěn)定性,從而大大提高汽車的行駛安全性。
目前ABS的控制方法主要有邏輯門限值控制、PID控制、滑模變結(jié)構(gòu)控制和模糊控制等。每種方法都有其優(yōu)缺點,邏輯門限值控制器設(shè)計簡單,便于實現(xiàn),但各門限值需要反復(fù)試驗確定,調(diào)速較困難[1-2]。PID控制器在工程中較常用,便于調(diào)試,但不適用于高度非線性系統(tǒng)[3-5]。模糊控制是基于經(jīng)驗的控制方法,實際應(yīng)用中很難建立合適的控制規(guī)則[6-7]。滑模變結(jié)構(gòu)控制對非線性和參數(shù)不確定的系統(tǒng)具有很強的魯棒性,但其固有的抖振會影響控制效果。
本文利用RBF神經(jīng)網(wǎng)絡(luò)對滑模變結(jié)構(gòu)控制器切換項的增益進行實時整定,提出一種基于RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制器,以期有效降低系統(tǒng)高頻抖振,保證系統(tǒng)對外界干擾具有較強的魯棒性。
1 ABS系統(tǒng)建模
1.1 單輪車輛制動模型
為了簡化研究問題,本文采用表征汽車制動過程主要運動特性的單輪車輛制動模型(如圖1所示),并且忽略汽車的滾動阻力偶矩、滾動阻力、空氣阻力及旋轉(zhuǎn)質(zhì)量減速時產(chǎn)生的慣性力偶矩,認為輪胎無變形,每個車輪所受載荷相等。

圖1 單輪車輛制動模型Fig.1 The braking model of a quarter-car
對車輪進行受力分析,可得單輪車輛制動模型的運動微分方程為
(1)

(2)
Fb=Fz·μ
(3)
式中:m為1/4車輛質(zhì)量;u為車輪中心速度;Fb為地面制動力;J為車輪轉(zhuǎn)動慣量;ω為車輪角速度;Tb為制動力矩;Fz=mg為地面法向反力,g為重力加速度;μ為地面縱向附著系數(shù);W為垂直載荷。
1.2 輪胎模型
輪胎是車身與地面接觸的唯一部件,簡化和建立合理的輪胎模型對汽車ABS制動性能的分析極為重要。目前建立的輪胎模型有多種形式,由于Burckhardt輪胎模型形式簡單,待擬合參數(shù)少,且給出了縱向附著系數(shù)與滑移率之間的關(guān)系,因此本文采用Burckhardt輪胎模型,其方程式為
μ(λ)=c1(1-exp(-c2λ))-c3λ
(4)
式中:c1、c2、c3為模型參數(shù);λ為滑移率,其表達式如下:
(5)
為了簡化問題,假設(shè)路面條件是不變的,通過查閱文獻,取模型參數(shù)c1=0.857,c2=33.822,c3=0.347,對式(4)求導(dǎo)并令其等于零,可得最大地面附著系數(shù)對應(yīng)的滑移率,即最佳滑移率為
(6)
2 滑模變結(jié)構(gòu)控制器設(shè)計
制動過程中,輪胎與路面之間的摩擦特性導(dǎo)致防抱死系統(tǒng)具有非常明顯的非線性、時變性和不確定性,而滑模變結(jié)構(gòu)控制能很好地滿足這種特性要求[8]。由ABS的基本原理可知,其制動過程的本質(zhì)就是將車輪的縱向滑移率控制在最大地面附著系數(shù)對應(yīng)的滑移率λd,因此,本文定義控制器的跟蹤誤差為
e=λ-λd
(7)
選取滑模變結(jié)構(gòu)控制的切換函數(shù)為

(8)
式中:a為大于零的常數(shù);t為時間。
對式(7)、式(8)求導(dǎo)并整理得
(9)
對式(5)求導(dǎo)得

(10)
整理式(1)、式(2)、式(3)、式(10)并代入式(9)得
(11)
本文采用指數(shù)趨近律得

(12)
式中:ε為切換項增益,k為系數(shù),且均大于零;sgn(·)為符號函數(shù)。
由式(11)、式(12)可得滑模變結(jié)構(gòu)控制器的控制律為
Tb=Fzμr-

(13)
定義Lyapunov函數(shù)為
(14)
對式(14)求導(dǎo),并將式(12)代入得
(15)
根據(jù)Lyapunov穩(wěn)定性原理可知,系統(tǒng)漸近穩(wěn)定。
3 基于RBF神經(jīng)網(wǎng)絡(luò)的增益調(diào)節(jié)
采用RBF神經(jīng)網(wǎng)絡(luò)自適應(yīng)調(diào)節(jié)切換項增益ε,在保證系統(tǒng)魯棒性的同時,削弱系統(tǒng)的抖振[9-12]。RBF神經(jīng)網(wǎng)絡(luò)采用2-3-1的三層網(wǎng)絡(luò)結(jié)構(gòu),其網(wǎng)絡(luò)結(jié)構(gòu)關(guān)系如圖2所示。
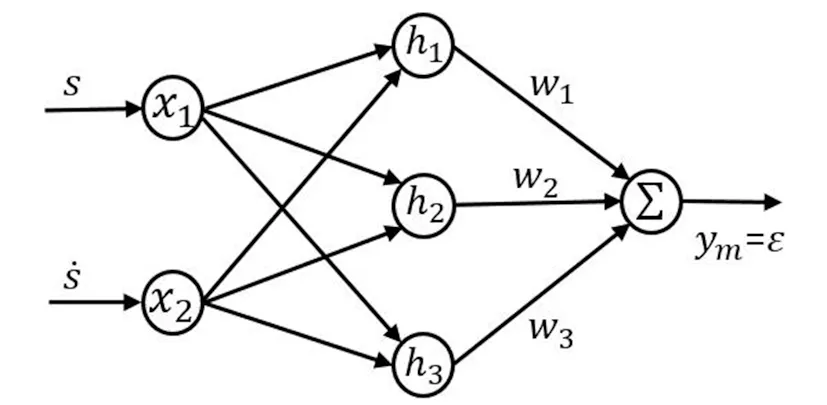
圖2 RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.2 Architecture of RBF neural network
ym=ε=|wTh(x)|
(16)
其中w=[w1,w2,w3]T為RBF神經(jīng)網(wǎng)絡(luò)的權(quán)值,h(x)=[h1(x),h2(x),h3(x)]T為高斯函數(shù)。

(17)
式中:i=1,2,3;ci為第i個神經(jīng)元的中心位置;bi為第i個神經(jīng)元的寬度。
神經(jīng)網(wǎng)絡(luò)權(quán)值調(diào)整的指標(biāo)為

(18)
神經(jīng)網(wǎng)絡(luò)權(quán)值調(diào)整算法和學(xué)習(xí)算法分別為:

(19)
式中:η為網(wǎng)絡(luò)學(xué)習(xí)速率,η∈(0,1);α為慣性量系數(shù),α∈(0,1) 。
神經(jīng)元中心位置的參數(shù)調(diào)整算法和學(xué)習(xí)算法分別為:
(20)
神經(jīng)元寬度的參數(shù)調(diào)整算法和學(xué)習(xí)算法分別為:
(21)

4 仿真分析
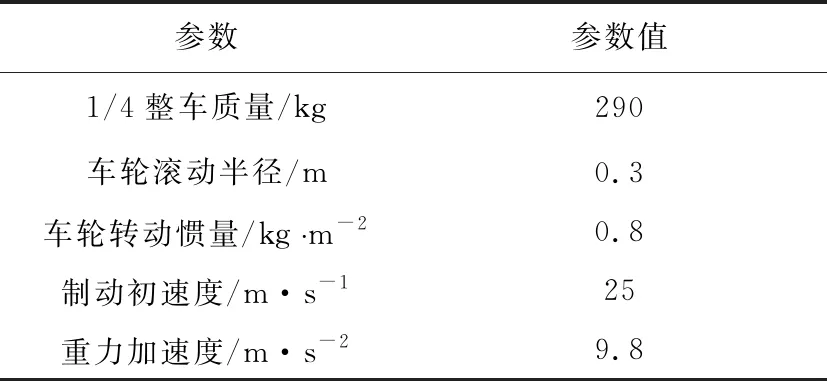
通過MATLAB/Simulink仿真平臺對基于RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制策略進行仿真分析。車輛主要仿真參數(shù)見表1。
表1 車輛主要仿真參數(shù)
Tab.1 Main simulation parameters of vehicle
在MATLAB/Simulink環(huán)境中搭建基于RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制模型,如圖3所示。

圖3 RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制模型Fig.3 ABS sliding mode control model based on RBF neural network


圖4 輪速、車速及制動距離仿真曲線Fig.4 Simulation curves of wheel speed,vehicle speed and braking distance
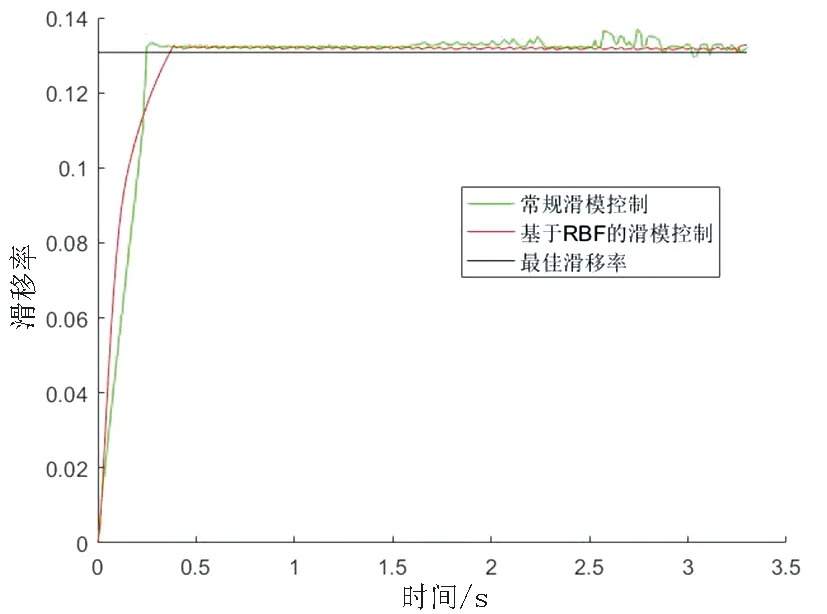
圖5 滑移率的時間響應(yīng)曲線Fig.5 Time response curve of slip rate
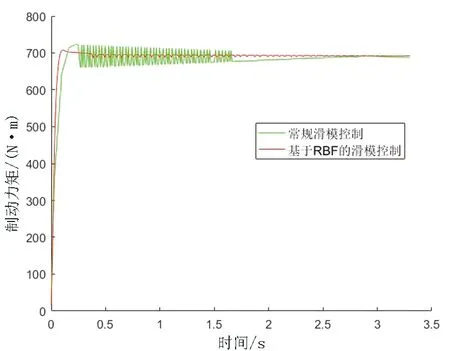
圖6 制動力矩的時間響應(yīng)曲線Fig.6 Time response curve of braking torque
從圖4和圖5可以看出,車輛在指定路面上以25 m/s的初速度制動時,經(jīng)3.1 s左右,車身速度和車輪速度同時減至零,車輛制動剎停,制動距離為41 m;車輪的滑移率在0.25 s左右達到最佳滑移率,之后在最佳滑移率附近波動,沒有出現(xiàn)抱死狀況,并且基于RBF神經(jīng)網(wǎng)絡(luò)的滑模變結(jié)構(gòu)控制的滑移率跟蹤誤差要小于常規(guī)滑模變結(jié)構(gòu)控制的滑移率跟蹤誤差。由此可見,基于RBF神經(jīng)網(wǎng)絡(luò)的滑模變結(jié)構(gòu)控制策略能夠使車輛獲得較大的地面縱向和側(cè)向附著系數(shù)、增大車輛制動力、降低制動距離,保證車輛的制動穩(wěn)定性和行駛安全性。
基于RBF的滑模控制策略利用RBF神經(jīng)網(wǎng)絡(luò)對常規(guī)滑模控制趨近率中的切換增益進行實時調(diào)整,期望控制目標(biāo)是:當(dāng)狀態(tài)遠離切換線時,有較大的切換增益,以保證系統(tǒng)較快的收斂速度;當(dāng)狀態(tài)接近切換線時,切換增益較小,以削弱抖振。由圖6可知,基于RBF神經(jīng)網(wǎng)絡(luò)的滑模變結(jié)構(gòu)控制輸出的制動力矩明顯比常規(guī)滑模變結(jié)構(gòu)控制的更為平穩(wěn),大大削弱了固定切換增益項開關(guān)函數(shù)帶來的抖振。
5 結(jié)論
1) 針對汽車防抱死制動系統(tǒng)提出的基于RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制策略是可行的,制動過程中車輪不發(fā)生抱死,車輪滑移率在最佳滑移率附近波動,能夠獲得最大的地面附著系數(shù),增大制動減速度,控制效果及穩(wěn)定性較為良好。
2)通過RBF神經(jīng)網(wǎng)絡(luò)對滑模變結(jié)構(gòu)控制器切換項增益的自適應(yīng)調(diào)整,有效削弱了由開關(guān)函數(shù)引起的抖振,從而降低了ABS系統(tǒng)對執(zhí)行器的要求。
3)為使本文提出的基于RBF神經(jīng)網(wǎng)絡(luò)的ABS滑模變結(jié)構(gòu)控制策略能夠適應(yīng)各種路面條件,還需要對路面狀況進行識別,實時計算當(dāng)前路面的最佳滑移率,以保證控制器能夠?qū)崟r跟蹤,從而適應(yīng)各種路面條件。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50