管道懸空災(zāi)害的分布式光纖實(shí)時(shí)監(jiān)測(cè)方法研究
2020-03-30 07:11:36滕建強(qiáng)楊耀輝
水利與建筑工程學(xué)報(bào) 2020年1期
關(guān)鍵詞:變形
趙 毅,滕建強(qiáng),2,楊耀輝,馮 新
(1.中國石油化工股份有限公司 西北油田分公司, 新疆 烏魯木齊 830011;2.中國石化縫洞型油藏提高采收率重點(diǎn)實(shí)驗(yàn)室, 新疆 烏魯木齊 830011;3.大連理工大學(xué) 建設(shè)工程學(xué)部, 遼寧 大連 116024)
根據(jù)國家發(fā)改委發(fā)布的《中長期油氣管網(wǎng)規(guī)劃》,預(yù)計(jì)到2020年,全國油氣管網(wǎng)規(guī)模將達(dá)到16.9萬km,其中原油、成品油、天然氣管道里程分別為3.2萬km、3.3萬km、10.4萬km;到2025年,全國油氣管網(wǎng)規(guī)模將進(jìn)一步擴(kuò)大到24萬km。因此,我國油氣管網(wǎng)還將處于一個(gè)較長的發(fā)展時(shí)期。我國幅員遼闊,油氣藏的分布極不均勻,油氣管道面臨復(fù)雜的地質(zhì)和自然災(zāi)害情況。國際上的經(jīng)驗(yàn)表明,雖然第三方破壞、腐蝕、誤操作等因素是導(dǎo)致管網(wǎng)失效的主要原因,但是對(duì)于存在地質(zhì)災(zāi)害風(fēng)險(xiǎn)的區(qū)域,因滑坡、侵蝕、沉降、流動(dòng)沙丘以及洪水等地質(zhì)或自然災(zāi)害造成的管道斷裂卻頻繁發(fā)生,且后果遠(yuǎn)較一般地區(qū)更為嚴(yán)重[1]。例如,發(fā)生于1987年的厄瓜多爾管線斷裂事件,因強(qiáng)降雨及地震引發(fā)滑坡,導(dǎo)致Trans-Ecuadorian管線系統(tǒng)的70 km管道遭受破壞,造成了歷史上單一管線的最大事故,僅修復(fù)就花費(fèi)了6個(gè)月的時(shí)間,直接、間接經(jīng)濟(jì)損失巨大[2]。
滑坡、侵蝕、流動(dòng)沙丘等地質(zhì)災(zāi)害通常導(dǎo)致管道發(fā)生懸空,引起管壁出現(xiàn)較大的彎曲應(yīng)力,嚴(yán)重時(shí)造成管道斷裂事故。但是對(duì)于沙漠或山區(qū)等野外條件,管道懸空的及時(shí)發(fā)現(xiàn)卻極其困難。盡管激光雷達(dá)(LiDAR)和無人機(jī)(UAV)等新技術(shù)已經(jīng)在管道完整性檢測(cè)中得到應(yīng)用[3-4],但是這些技術(shù)存在無法實(shí)時(shí)監(jiān)測(cè)、成本高、數(shù)據(jù)解釋困難的問題,還不能滿足長輸油氣管道懸空監(jiān)測(cè)和預(yù)警的要求。近年來,分布式光纖傳感技術(shù)逐漸應(yīng)用于埋地和海底管道,它具有實(shí)時(shí)監(jiān)測(cè)、遠(yuǎn)程傳感、分布式測(cè)量的優(yōu)勢(shì),可以在線獲得管道任意位置應(yīng)變和泄漏等在位狀態(tài)[5-9]。管道懸空將引起復(fù)雜的管-土相互作用,如何根據(jù)管道的應(yīng)變分布評(píng)價(jià)管道懸空狀態(tài),目前仍是一個(gè)挑戰(zhàn)性的問題。筆者基于懸空管道的力學(xué)響應(yīng)機(jī)理,提出一種監(jiān)測(cè)管道懸空災(zāi)害的分布式光纖監(jiān)測(cè)方法,并通過一系列的模型試驗(yàn)研究方法的有效性。
1 監(jiān)測(cè)方法
1.1 埋地管道懸空監(jiān)測(cè)原理
埋地管道在自重、覆土荷載、交通荷載等作用下,與地基土體之間將發(fā)生復(fù)雜的相互作用。為了描述管-土相互作用,通常將埋地管道視為受到彈簧約束作用的無限地基梁,其中最為常用的是Winkler模型[10]。在Winkler模型中,地基土體的約束作用由一系列等間距排列、相互獨(dú)立的彈簧所代替,每一個(gè)彈簧向管道提供法向或切向的抵抗作用,其作用可用單參數(shù)、雙參數(shù)或三參數(shù)來描述。若只考慮豎直面內(nèi)的管-土相互作用,則系統(tǒng)的控制方程可寫為:
(1)

而管道一旦因引言所述的各種原因形成懸空(如圖1(a)所示),則難以利用Winkler模型獲得管道力學(xué)響應(yīng)的分析解答, 但是我們?nèi)匀豢梢愿鶕?jù)管-土相互作用的基本原理,考察懸空管道的力學(xué)行為。假設(shè)管道非懸空部分仍為彈性地基上的無限長梁,在懸空段由于土體支撐作用的喪失,管道在自重作用下發(fā)生向下的撓曲變形,撓度在懸空段中點(diǎn)達(dá)到最大。隨著位置向兩側(cè)土體趨近,管道撓曲變形逐漸減小。當(dāng)管道由懸空段進(jìn)入兩側(cè)土體后,土體仍然向管道提供約束作用,撓曲變形進(jìn)一步減小,但是由于變形協(xié)調(diào),其變形的方向?qū)l(fā)生變化,并且隨著位置逐漸遠(yuǎn)離懸空段,反方向的撓曲變形先增加后減小,直至消失,在變形消失處形成了兩個(gè)“錨固點(diǎn)”,我們將懸空段兩側(cè)坡肩至錨固點(diǎn)的范圍定義為“轉(zhuǎn)換段”。在轉(zhuǎn)換段內(nèi),土體仍可被視作Winkler模型的土彈簧,若將該段土體約束作用離散為等間距的土彈簧,則管道懸空段和轉(zhuǎn)換段的力學(xué)模型如圖1(b)所示,于是這三段管道便成為一個(gè)具有彈性支撐的連續(xù)梁,其邊界條件(錨固點(diǎn))為簡(jiǎn)支。根據(jù)結(jié)構(gòu)力學(xué)原理可知,懸空導(dǎo)致的附加彎矩分布如圖1(c)。其中,錨固點(diǎn)以外的管道不會(huì)因懸空而產(chǎn)生附加彎矩;懸空段會(huì)在跨中形成最大正彎矩,然后向兩側(cè)逐漸減小,并且在靠近轉(zhuǎn)換段處形成負(fù)彎矩區(qū);在轉(zhuǎn)換段的起點(diǎn)即坡肩處,負(fù)彎矩達(dá)到最大值,形成反彎點(diǎn),然后負(fù)彎矩逐漸減小,至錨固點(diǎn)處則完全消失。圖1(c)所示的附加彎矩分布給出了懸空導(dǎo)致的管道應(yīng)變/應(yīng)力變化曲線,如果通過監(jiān)測(cè)獲得兩個(gè)相繼狀態(tài)的管道應(yīng)變分布曲線具有圖1(c)的形狀,就可以判斷管道出現(xiàn)了懸空,并且可以判斷管道懸空段和轉(zhuǎn)換段的位置和長度。

圖1 埋地管道懸空變形與附加彎矩分布式示意圖然
1.2 埋地管道懸空分布式光纖監(jiān)測(cè)方法
上節(jié)給出了一種根據(jù)彎曲應(yīng)變變化曲線識(shí)別管道懸空狀態(tài)的基本原理,但是如果只對(duì)特定截面的管道進(jìn)行離散式的應(yīng)變監(jiān)測(cè),顯然無法得到圖1(c)所示的附加彎矩曲線,因此埋地管道懸空災(zāi)害監(jiān)測(cè)的關(guān)鍵問題是獲得管道的彎曲應(yīng)變分布。目前,國內(nèi)外較為成熟的分布式應(yīng)變監(jiān)測(cè)技術(shù)是基于Brillouin散射原理的分布式光纖應(yīng)變傳感方法,實(shí)現(xiàn)了埋地管道彎曲應(yīng)力、整體屈曲和局部屈曲的精準(zhǔn)識(shí)別與定量評(píng)價(jià)。
雖然管-土相互作用可以簡(jiǎn)化為Winkler地基梁模型,但是管道的變形卻具有典型的三維空間特性,而Brillouin光纖傳感器卻只能獲得一維的應(yīng)變分布。為了完整獲得管道的空間變形和應(yīng)變分布,可采用螺旋布設(shè)和平行布設(shè)兩種方式安裝分布式光纖傳感器,然而前者對(duì)傳感器的安裝位置要求極其嚴(yán)苛,并且布設(shè)困難、施工效率低下,后者雖然需要平行布設(shè)3條分布式光纖傳感器,但是傳感器均沿管道縱向布設(shè),比較便于施工,因此本文采用這種傳感器布設(shè)方式,其具體布設(shè)位置如圖2所示,即在截面的12點(diǎn)鐘、3點(diǎn)鐘和9點(diǎn)鐘位置分別沿管道縱向布設(shè)3條Brillouin光纖應(yīng)變傳感器。
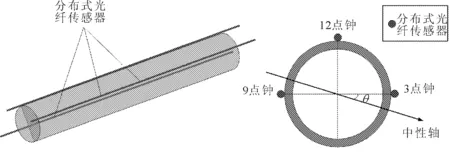
(a) 縱向 (b) 橫向
沿管道縱向布設(shè)的分布式光纖傳感器并不能直接得到管道的彎曲應(yīng)變,測(cè)量結(jié)果是彎曲應(yīng)變和軸向應(yīng)變疊加的結(jié)果,并且由于施工以及管道空間變形等原因,傳感器與管道中性平面之間也可能存在一定角度。針對(duì)上述問題,筆者已經(jīng)建立了根據(jù)分布式光纖應(yīng)變監(jiān)測(cè)數(shù)據(jù)提取管道彎曲和軸向應(yīng)變的方法[11-15],具體計(jì)算公式如下:
(2)
式中:x為管道縱向的任意位置;εt(x)、εL(x)和εR(x)分別為管道縱向x處截面上12點(diǎn)鐘、9點(diǎn)鐘和3點(diǎn)鐘位置的傳感器所獲得的應(yīng)變觀測(cè)值;θ為管道中性平面與水平面的夾角;εb(x)和εa(x)分別為x處管道的彎曲和軸向應(yīng)變。當(dāng)利用圖2中所示的Brillouin光纖應(yīng)變傳感器獲得管道縱向應(yīng)變數(shù)據(jù)后,即可根據(jù)式(2)完整獲得管道的彎曲應(yīng)變和軸向應(yīng)變,進(jìn)而將彎曲應(yīng)變數(shù)據(jù)根據(jù)圖1(c)的特征進(jìn)行管道懸空狀態(tài)判別。
2 模型試驗(yàn)
2.1 試驗(yàn)裝置
為了驗(yàn)證第2部分所提方法對(duì)管道懸空災(zāi)害監(jiān)測(cè)的有效性,進(jìn)行了埋地管道分布式光纖監(jiān)測(cè)的模型試驗(yàn)研究。該試驗(yàn)可看作是一個(gè)流動(dòng)沙丘作用下管道懸空監(jiān)測(cè)的小原型模擬,并不考慮嚴(yán)格的物理相似,僅考慮管道與土體的幾何相似,著重研究懸空形成及發(fā)展過程中管道應(yīng)變曲線的變化規(guī)律,重點(diǎn)考察分布式光纖傳感器是否可以監(jiān)測(cè)管道的懸空狀態(tài)。
試驗(yàn)管道采用PPR管,長度為12 m,外徑為110 mm,壁厚為15.1 mm。PPR管材的彈性模量為808 MPa,密度為910 kg/m3。在幾何相似方面,以某Φ426鋼管為目標(biāo),管長和徑向的幾何比尺分別設(shè)計(jì)為12和3.87。并且為了模擬管道和內(nèi)部流體的重力效應(yīng),也對(duì)管道進(jìn)行了配重。
試驗(yàn)在圖3所示的大型管道試驗(yàn)箱(長12 m×寬1 m×高1.7 m)內(nèi)進(jìn)行,首先在試驗(yàn)箱內(nèi)鋪設(shè)厚度為1 m的碎石和土體并進(jìn)行夯實(shí),然后鋪設(shè)30 cm厚的細(xì)沙,接著將管道平鋪在沙床上,當(dāng)完成傳感器布設(shè)后在試驗(yàn)箱內(nèi)填埋細(xì)沙。考慮流動(dòng)沙丘的情況,管道上部覆沙可能已經(jīng)減薄,因此埋深約為10 cm(表面至管頂),根據(jù)幾何比尺換算后的實(shí)際覆沙厚度約為38.7 cm。試驗(yàn)中,懸空的模擬是由管道中心開挖,然后逐漸向兩側(cè)擴(kuò)大,但懸跨內(nèi)懸空高度一致,僅設(shè)置為3.5 cm,根據(jù)幾何相似,實(shí)際懸空高度約為14 cm。需要說明,試驗(yàn)并未考慮懸空長度和高度的極端情況,僅為驗(yàn)證監(jiān)測(cè)方法的可行性。
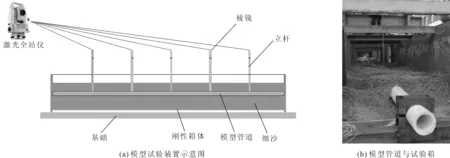
圖3 管道懸空監(jiān)測(cè)試驗(yàn)裝置
按照?qǐng)D2所示的位置將分布式光纖應(yīng)變傳感器固定在管道上,同時(shí)為了進(jìn)行數(shù)據(jù)比對(duì),在管道底部增設(shè)了一條分布式光纖應(yīng)變傳感器,共沿管道長度方向平行布設(shè)了4條分布式光纖傳感器。同時(shí)為了保證光纖監(jiān)測(cè)數(shù)據(jù)的可靠性,也在模型管道的1/6、1/3、1/2、2/3、5/6長度處,在管頂和管底分別等間距布設(shè)電阻應(yīng)變片。在這些位置上,也布置了輕質(zhì)剛性立桿,作為管道關(guān)鍵斷面的變形監(jiān)測(cè)靶點(diǎn),通過激光全站儀觀測(cè)不同試驗(yàn)工況下管道的變形狀態(tài)。
分布式光纖傳感器的數(shù)據(jù)采集采用NBX-6050A光納儀,空間分辨率設(shè)置為10 cm,距離分辨率5 cm,形成分布式的應(yīng)變測(cè)量。電阻應(yīng)變片的測(cè)量采用cDAQ多通道數(shù)據(jù)采集系統(tǒng),應(yīng)變片為1/4橋連接。管道變形采用RTS11R6 激光全站儀進(jìn)行測(cè)量。
試驗(yàn)工況共包括8種,即以管道中點(diǎn)為對(duì)稱中心向兩側(cè)等長度開挖,形成管道懸空。8種工況對(duì)應(yīng)的懸空長度分別為1.00 m、1.50 m、2.00 m、2.50 m、3.00 m、3.50 m、4.00 m和4.75 m。
2.2 試驗(yàn)結(jié)果分析
根據(jù)5處全站儀監(jiān)測(cè)數(shù)據(jù),將8種工況下管道的變形情況繪于圖4。可以發(fā)現(xiàn),在前4種工況下,管道在懸空段及其附近區(qū)域出現(xiàn)了向下的撓曲變形,每種工況均為跨中撓度最大,并且隨著懸空段長度增加,撓度也呈現(xiàn)遞增趨勢(shì),但是變形數(shù)值均較小,即使在懸空長度達(dá)到2.5 m時(shí)(工況4),跨中撓度也未超過0.2 cm;在第5種工況后,跨中撓度增加明顯,并且隨著懸空長度的增加,撓度也不斷增大,并且其影響范圍也逐漸擴(kuò)大;在第8種工況時(shí),懸空長度達(dá)到4.75 m,跨中撓度達(dá)到3.5 cm,已經(jīng)觀察到管道觸底現(xiàn)象。在圖4中,管道撓曲變形基本以跨中為中心對(duì)稱,但是實(shí)際中難以保證兩側(cè)土體約束條件完全一致,并且每種工況的開挖擾動(dòng)客觀存在,因此圖中撓曲線的對(duì)稱性也存在一定程度的偏差。
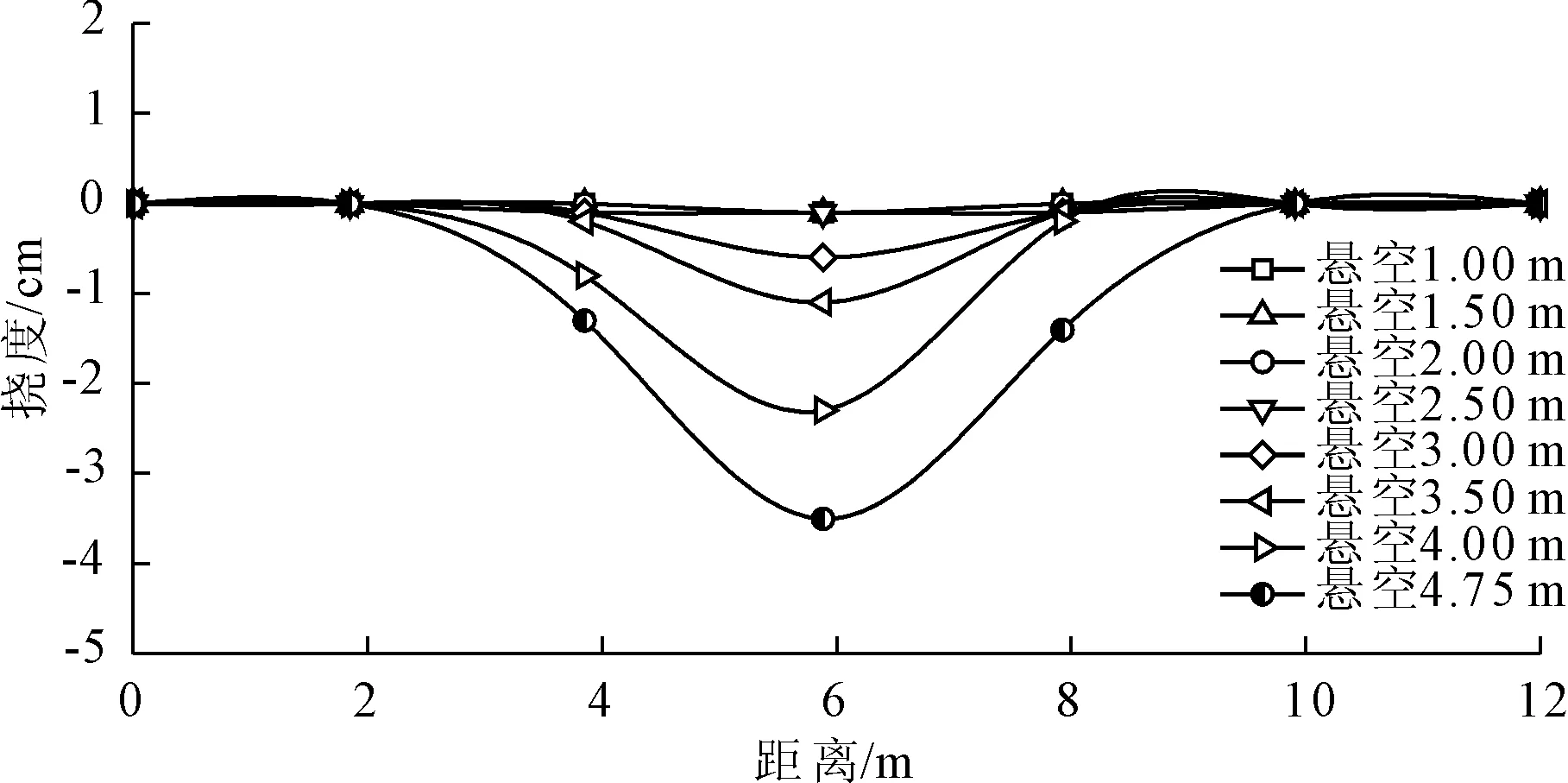
圖4 不同懸空長度下管道撓曲變形監(jiān)測(cè)數(shù)據(jù)
在每種工況下,都分別利用分布式光纖應(yīng)變傳感器和電阻應(yīng)變片,監(jiān)測(cè)懸空導(dǎo)致的管道應(yīng)變變化情況。試驗(yàn)中,位于管道截面3點(diǎn)鐘和9點(diǎn)鐘的分布式應(yīng)變數(shù)據(jù)分布趨勢(shì)基本一致,并且數(shù)值都在±50 με范圍內(nèi)波動(dòng),因此認(rèn)為管道軸向應(yīng)變較小,數(shù)據(jù)僅與測(cè)量誤差和試驗(yàn)擾動(dòng)有關(guān),本文限于篇幅不再列出,重點(diǎn)討論與彎曲應(yīng)變主導(dǎo)的管頂和管底的分布式應(yīng)變數(shù)據(jù)(見圖5)。同時(shí),為了檢驗(yàn)分布式應(yīng)變數(shù)據(jù)的可靠性,在圖5中也分別繪制了電阻應(yīng)變片的測(cè)量結(jié)果。對(duì)比二者數(shù)據(jù)可以發(fā)現(xiàn),所有工況中控制截面的測(cè)量結(jié)果均吻合較好,說明分布式光纖傳感器可以較為精確地測(cè)量管道應(yīng)變,但是如圖所示,分布式光纖傳感器可以獲得管道任意位置的縱向應(yīng)變,而電阻應(yīng)變片卻只能得到有限個(gè)離散測(cè)點(diǎn)的數(shù)據(jù),顯然無法滿足管道懸空監(jiān)測(cè)的需要。
圖5顯示,在前4種工況中,無論是管頂管底的分布式應(yīng)變數(shù)據(jù)均非常小,無法明顯觀測(cè)到圖1中的懸空特征,結(jié)合圖4中的撓曲線進(jìn)行分析,當(dāng)懸空長度不超過2.50 m時(shí),管道的變形較小,相對(duì)應(yīng)的,管道的應(yīng)變響應(yīng)也應(yīng)較小,因此還無法利用分布式應(yīng)變數(shù)據(jù)判別管道懸空的出現(xiàn)。

圖5 不同懸空長度下管道分布式應(yīng)變監(jiān)測(cè)數(shù)據(jù)
當(dāng)懸空長度增加至3.00 m時(shí)(工況5),圖5顯示管頂和管底的分布式應(yīng)變數(shù)據(jù)都出現(xiàn)了明顯的懸空特征,即在懸空段形成正彎矩(管底最大拉應(yīng)變約為451 με),在懸空段兩側(cè)出現(xiàn)負(fù)彎矩,負(fù)彎矩逐漸增加然后減小,可判斷該范圍為轉(zhuǎn)換段。轉(zhuǎn)換段的應(yīng)變?cè)诩s3.00 m和9.00 m處減小為0,然后至管道兩端均無應(yīng)變反應(yīng),說明3.00 m和9.00 m為錨固點(diǎn),懸空對(duì)其以外的區(qū)域沒有影響。與實(shí)際懸空長度相比,工況5的分布式應(yīng)變監(jiān)測(cè)數(shù)據(jù)顯示,左側(cè)負(fù)彎矩峰值約位于4.00 m處,而左側(cè)坡肩在 4.50 m處,右側(cè)負(fù)彎矩峰值約位于7.50 m處,基本與右側(cè)坡肩重合。除此以外,工況5中管道的應(yīng)變分布也未以管道中點(diǎn)對(duì)稱分布。這兩種情況應(yīng)與懸空兩側(cè)土體性質(zhì)的非一致性、開挖擾動(dòng)以及復(fù)雜的管-土相互作用有關(guān),但是監(jiān)測(cè)數(shù)據(jù)可以準(zhǔn)確判斷懸空的出現(xiàn),并對(duì)懸空導(dǎo)致的管道應(yīng)變(應(yīng)力)分布給出定量結(jié)果,同時(shí)對(duì)懸空長度也可給出一定精度的估計(jì)。
隨著懸空長度增加至3.50 m和4.00 m(工況6和工況7),分布式應(yīng)變數(shù)據(jù)的形狀都具有清晰的懸空特征,并且懸空段的峰值應(yīng)變也明顯增加,工況6和工況7懸空段的峰值應(yīng)變分別達(dá)到716 με和1 075 με。在轉(zhuǎn)換段內(nèi),負(fù)彎矩峰值對(duì)應(yīng)的應(yīng)變數(shù)值也逐漸增加,同時(shí)錨固點(diǎn)位置不斷外擴(kuò)。在這兩種工況中,負(fù)彎矩峰值點(diǎn)的位置都稍位于坡肩外側(cè),但是差別均不超過0.50 m,說明監(jiān)測(cè)數(shù)據(jù)對(duì)懸空長度的識(shí)別也基本正確。
懸空長度達(dá)到4.75 m時(shí)(工況8),圖4的跨中撓度監(jiān)測(cè)結(jié)果表明,管道底部已經(jīng)部分觸底,因此應(yīng)變分布曲線不再呈現(xiàn)典型的懸空特征。與工況7比較,圖5中懸空段峰值應(yīng)變沒有繼續(xù)增加(1 051 με),并且在5.00 m至6.00 m范圍內(nèi),其應(yīng)變數(shù)值反倒明顯降低,雖然6.00 m至8.00 m區(qū)域的應(yīng)變數(shù)值有所增大,但是也較工況7峰值應(yīng)變減小約50%,說明觸底使管道懸空段的應(yīng)變得到了釋放和重新分布。工況8的錨固點(diǎn)約位于2.00 m和10.00 m處,轉(zhuǎn)換段的峰值應(yīng)變較工況7有所增加,對(duì)應(yīng)的位置分別為3.20 m和8.60 m處,仍稍稍位于坡肩外側(cè),但與坡肩的偏差均不超過0.30 m,說明隨著懸空長度的增加,管道下?lián)线M(jìn)一步加劇,轉(zhuǎn)換段對(duì)管道提供的豎向反力不斷增加,其負(fù)彎矩峰值的位置更加接近理想情況,其對(duì)懸空長度的識(shí)別更加精確。工況8的試驗(yàn)結(jié)果表明,所建立的懸空監(jiān)測(cè)方法,不但可以準(zhǔn)確識(shí)別管道懸空的發(fā)展,而且可以有效判斷管道的觸底行為。
3 結(jié) 論
流動(dòng)沙丘、滑坡和侵蝕等地質(zhì)災(zāi)害均可導(dǎo)致埋地管道發(fā)生懸空,威脅管道安全運(yùn)行。實(shí)時(shí)監(jiān)測(cè)管道懸空的形成與發(fā)展,可以為管道安全預(yù)警提供科學(xué)依據(jù)。根據(jù)懸空管道響應(yīng)機(jī)理,提出了一種利用分布式光纖應(yīng)變傳感器監(jiān)測(cè)懸空附加彎矩曲線的方法,建立了管道懸空的識(shí)別技術(shù)。該方法的特點(diǎn)是可以對(duì)管道任意位置的縱向應(yīng)變進(jìn)行實(shí)時(shí)監(jiān)測(cè),通過數(shù)據(jù)分析獲得管道懸空的發(fā)展變化情況。模型試驗(yàn)結(jié)果表明:分布式光纖應(yīng)變傳感器與電阻應(yīng)變片在控制斷面的監(jiān)測(cè)數(shù)據(jù)基本吻合,說明該方法對(duì)于管道縱向應(yīng)變的監(jiān)測(cè)具有較高的可靠性,但是卻可以有效避免應(yīng)變片和光纖光柵(FBG)等點(diǎn)式測(cè)量技術(shù)無法對(duì)管道全長任意位置進(jìn)行監(jiān)測(cè)的局限性;當(dāng)懸空導(dǎo)致管道產(chǎn)生一定的撓曲變形后(≥6 mm),分布式光纖監(jiān)測(cè)數(shù)據(jù)呈現(xiàn)典型的懸空特征,可以準(zhǔn)確判斷管道懸空的出現(xiàn),并且根據(jù)負(fù)彎矩峰值及其消失點(diǎn)的位置,可以定量識(shí)別懸空長度及其影響范圍(轉(zhuǎn)換段);分布式光纖傳感器提供了管道全長的應(yīng)變分布情況,可以實(shí)時(shí)評(píng)估管道的彎曲應(yīng)力狀態(tài),為懸空災(zāi)害導(dǎo)致的管道失效提供預(yù)警數(shù)據(jù)。為了適應(yīng)實(shí)際監(jiān)測(cè)評(píng)價(jià)的需求,未來應(yīng)進(jìn)一步研究基于人工智能的監(jiān)測(cè)數(shù)據(jù)懸空特征提取方法,實(shí)現(xiàn)管道大范圍懸空災(zāi)害的定量診斷與智能預(yù)警。
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級(jí)版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36