基于MED-EEMD和ELM的軸向柱塞泵松靴故障診斷研究*
2020-03-31 09:41:26劉生政曾祥輝王志堅
機電工程 2020年3期
劉生政,張 琳,2,曾祥輝,蘭 媛,2*,王志堅,程 珩,2
(1.太原理工大學 機械與運載工程學院,山西 太原 030024;2.太原理工大學 新型傳感器與智能控制教育部(山西省)重點實驗室,山西 太原 030024;3.中北大學 機械工程學院,山西 太原 030051)
0 引 言
柱塞泵是液壓系統的重要部件之一,其具有強耐壓、效率高、傳輸功率大等優點,但是它內部結構復雜、維護困難。同時,柱塞泵的工作環境相對惡劣,而且長時間處于高壓和高速運轉的工作狀態,所以不可避免會出現各種故障,而這些故障信號通常都被強噪聲信號所埋沒,不易察覺,因此,對柱塞泵進行狀態監測與診斷是系統正常運行的重要保證[1-2]。
柱塞泵常見的故障有松靴故障、配流盤磨損和滑靴磨損等故障。松靴故障是柱塞泵的主要失效形式,但由于在強噪聲干擾下故障信號微弱和故障特征提取困難等一系列問題,成為柱塞泵故障診斷研究的重點和難點。松靴故障通常是由于制造或裝配誤差及柱塞泵在動作過程中的壓力沖擊,導致柱塞球頭與滑靴間隙增大而產生的。柱塞泵缸體在轉動過程中,柱塞在缸體中往復運動。當缸體轉過一定角度時,經過上死點,柱塞進入吸油區,柱塞球頭與滑靴發生一次碰撞;當缸體轉動經過上死點后,柱塞球頭與滑靴發生相對運動;當轉過排油區時,高壓油作用在柱塞上,使柱塞迅速向球頭方向運動,從而又一次產生沖擊。缸體轉動一周,柱塞球頭與滑靴發生兩次碰撞,能量經過傳動軸和軸承傳遞到殼體上,所以松靴故障的特征頻率應為轉軸頻率的兩倍[3]。
由于工作環境惡劣,采集到的松靴故障特征信息很容易被背景噪聲所埋沒,對其故障特征信號進行去噪從而提取到有效的特征量將成為問題的關鍵。近年來國內外學者針對柱塞泵松靴微弱故障開展了廣泛的研究,小波分析[4]、經驗模態分解[5]、變分模態分解[6]、自適應隨機共振[7]等一系列信號處理方法已用于信號去噪和特征值提取中。其中由于小波基函數和閾值的選擇不具有自適應性,小波降噪的效果受人為因素的影響;經驗模態分解克服了傳統包絡分析中需要預先確定濾波器中心頻帶的難題,廣泛應用于非線型、非平穩信號的分析,但是其不足之處是存在模態混疊現象。綜上所述,在強噪聲干擾的情況下,以上方法對柱塞泵松靴故障的微弱信號特征量提取表現不足,因此非常有必要尋找一種新的方法來抑制噪聲的干擾,從而凸顯故障特征,同時有效提取表征柱塞泵工作狀態特征量。
基于上述問題,本文引入最小熵反褶積(MED),其出發點是尋求最優的濾波器使原信號的峭度值最大,抑制強噪聲的干擾,讓沖擊成分更加突出,從而提高原信號的信噪比。集合經驗模態分解(EEMD)是一種信號自適應分解方法,通過添加有限次的自適應白噪聲以及計算唯一的余量信號獲取模態分量,使得重構信號更加近似于原始信號。EEMD和經驗模態分解(empirical mode decomposition, EMD)相比,EEMD表現出更好的魯棒性和高效性,克服了EMD存在的分解不完整性、模態混疊和計算量大等缺點。
本文針對通過EEMD在強噪聲環境下對松靴故障特征提取表現不佳,提出先用MED對振動信號降噪處理,然后對降噪信號進行EEMD分解,對得到的信號進行奇異值分解(singularity value decomposition,SVD),將得到的特征矩陣輸入超限學習機模型(extreme learning machine, ELM),從而實現對松靴故障的診斷。
1 最小熵反褶積(MED)
MED是一種自適應系統識別方法,最早是由Wiggins提出,Sawalhi[8]在2007年首次將MED用于滾動軸承與齒輪故障診斷。MED的基本原理是解反褶積突出少數大的尖脈沖,根據峭度最大原理,峭度值越大表明信號沖擊成分所占比例越多,該特性能更好突出沖擊脈沖,因此,它對旋轉機械沖擊性故障的降噪處理非常適用[9]。
假設當柱塞泵滑靴發生故障時信號表達為:
y(n)=h(n)x(n)+e(n)
(1)
式中:e(n)—噪聲;x(n)—滑靴故障的沖擊序列;h(n)—傳遞函數;y(n)—振動信號。
由于環境噪聲及傳輸路徑的影響x(n)衰減為y(n)后失去源信號的特性,導致熵變大。解反褶積的目的是得到一個逆濾波器f(n),由輸出y(n)恢復輸入x(n)所具有的特性,即:

(2)
式中:L—逆濾波器f(n)的長度。
解反褶積是提取信號中較大的尖端脈沖成分,沖擊特征越強,峭度值也就越大。將目標函數設置為信號x(n)的峭度最大化,即:
(3)
為了求得最優逆濾波器f(n),使目標函數K(f(j))的一階導數為零。
MED尋找最小熵的算法可以歸納如下:
(1)初始化濾波器系數f∶f0=1;
(4)計算f(i)=A-1b(l)(式中:A—序列y(n)的L×L自相關矩陣);

2 集合經驗模態分解(EEMD)
EMD是根據振動信號自身的時間尺度特征來進行分解,而且事先不需要設定任何參數,但是具有一定的缺陷,比如存在模態混疊現象。針對該不足,Huang[10]提出了EEMD方法,利用白噪聲序列具有零均值、多次平均后被相互抵消的特點,有效改善了EMD分解產生模態混疊的弊端。具體分解步驟如下:
(1)在待分解信號R(t)中加入頻譜均勻分布的白噪聲am(t);
(2)對所得信號S(t)進行EMD,分解過程如下:
①確定信號S(t)上的所有局部極值點,上、下2條包絡線是用3次樣條曲線分別將所有的局部極大值點和局部極小值點聯結起來而得到的,即S(t)max和S(t)min;
②求每個時刻的上下包絡的平均值,即:
(4)
③得到新信號:
Y1(t)=S(t)-u(t)
(5)
判斷Y1(t)是否滿足IMF分量的兩個條件((a)在整個數據序列中,極值點的數量與過零點的數量相等,或最多相差不能多于一個;(b)在任一點上,信號的局部最大值和局部最小值定義的包絡均值為零),如果滿足記為C1(t),即為第一個IMF分量,否則重復步驟1和2;
④將C1(t)從S(t)中分離出來得到一個差值信號:
V1(t)=S(t)-C1(t)
(6)
⑤將V1(t)作為原始數據,重復求IMF1的步驟得到IMF2,重復n次得到n個IMF分量,于是有:
V1-C2=V2(t)
?
Vn-1-Cn=Vn(t)
(7)
當Vn(t)符合給定的終止條件(即Vn(t)為單調函數)時,循環結束。由式(6)和式(7)可得到:
(8)
即原始信號被表示為本征模態函數分量和一個殘余函數Vn(t)的和。各分量C1(t),C2(t),…,Cn(t)分別涵蓋了原始信號中從高到低不同頻率段的信息,且隨信號自身的改變而改變。
(3)每次加入不同白噪聲后重復過程(1)和(2);
(4)將多次EMD分解后的各IMF分量的均值作為最終結果。
3 超限學習機(ELM)
ELM最初是由黃廣斌教授在2004年提出的[11-13],該方法是一種簡單易用且有效的單隱層前饋神經網絡學習算法。其在訓練的過程中隨機給定輸入層與隱含層之間的權值,以及隱層神經元的閾值,且在算法完整運行過程中這兩個參數保持恒定,單在給定隱含層神經元個數的情況下,神經網絡就可以得到最優解,且最優解唯一[14]。
對于樣本數為N的數據集(xi,yj)∈Rn×Rm,L個隱層節點的SLFN可描述為:
(9)
式中:wi—輸入權值;bi—隱層神經元閾值;βi—隱層第i個神經元與輸出層的連接權值;G(wi·xj+bi)—隱層神經元的激活函數。
以矩陣的形式表示為:
Hβ=Y
(10)
式中:H—神經網絡隱層輸出矩陣。
因為隨機產生輸入權值和隱層神經元閾值,不需要調整H,隱層與輸出連接權值β通過求解方程解得,即:
(11)
式中:H+—隱層輸出矩陣H的Moore-Penrose廣義逆。
因此,ELM算法步驟如下:
(1)確定前饋神經網絡的結構(隱層節點數、激活函數類型);
(2)隨機生成前饋神經網絡的輸入權值和偏置;
(3)求解前饋神經網絡輸出權值[15-16]。
備注:Huang等人使用增量的方法分析了ELM的通用逼近能力,并且表明了隨機生成(多種)隱層參數可讓單層前饋網絡逼近任何連續的目標函數。
4 實驗及結果分析
本文以軸向柱塞泵為研究對象,采集了泵殼振動信號作為原始信號,將振動信號通過MED降噪,再進行EEMD自適應分解之后再通過SVD分解作為特征矩陣,最后將以上提取的特征矩陣導入ELM進行分類,實現軸向柱塞泵松靴故障的檢測與診斷。
具體研究過程如圖1所示。
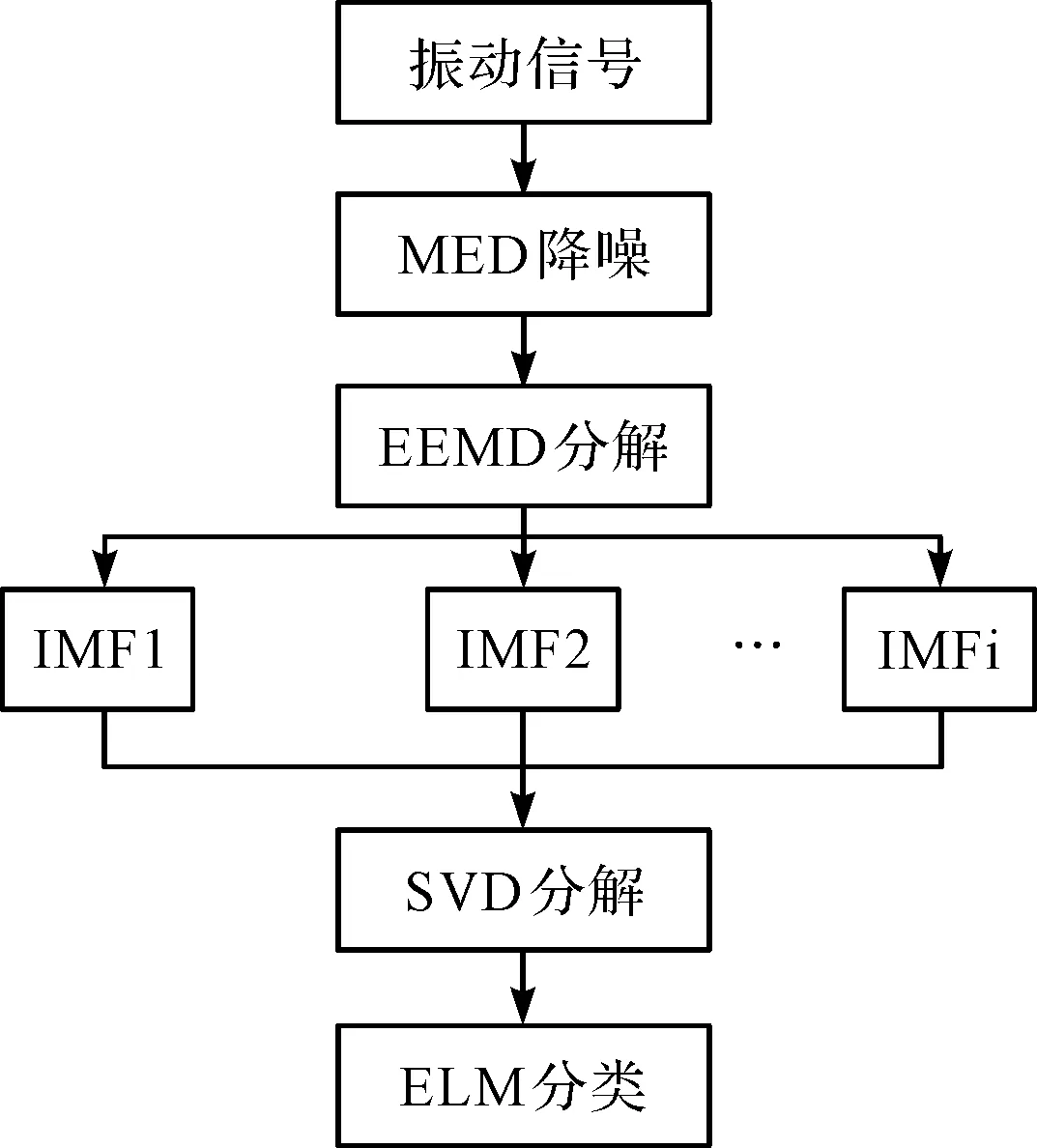
圖1 研究思路流程圖
4.1 實驗裝置
為了驗證MED-EEMD方法的有效性,筆者將其應用到柱塞泵松靴故障中,實驗系統圖如圖2所示。
實驗臺采用交流電機驅動方案,電機經過聯軸器直接驅動柱塞泵,結構簡單且平穩可靠。實驗調定主油路壓力為10 MPa。通過振動加速度傳感器采集泵殼振動信號,該信號經過耦合器和采集卡,并通過轉換儲存于計算機中。
部分元件型號及性能參數如下:
(1)驅動電機。型號Y225S-4,額定轉速為1 480 r/min;
(2)軸向柱塞泵。型號A10VSO45,柱塞數為9,額定壓力為28 MPa;
(3)加速度傳感器。型號KISTLER8795A50,頻率響應范圍1 Hz~4 000 Hz;
(4)耦合器。型號為KISTLER 5134;
(5)數字采集卡。型號NI-USB-6343,采樣頻率為45 kHz。
由于柱塞泵內部結構緊湊,受外界干擾嚴重,振動能量會以信號的形式通過各種介質傳播到傳感器,為了最大程度地將故障信息通過振動信號表征出來,本研究將三軸加速度傳感器分別安裝于頂部、側面和端蓋。
三軸加速度傳感器布點位置如圖3所示。
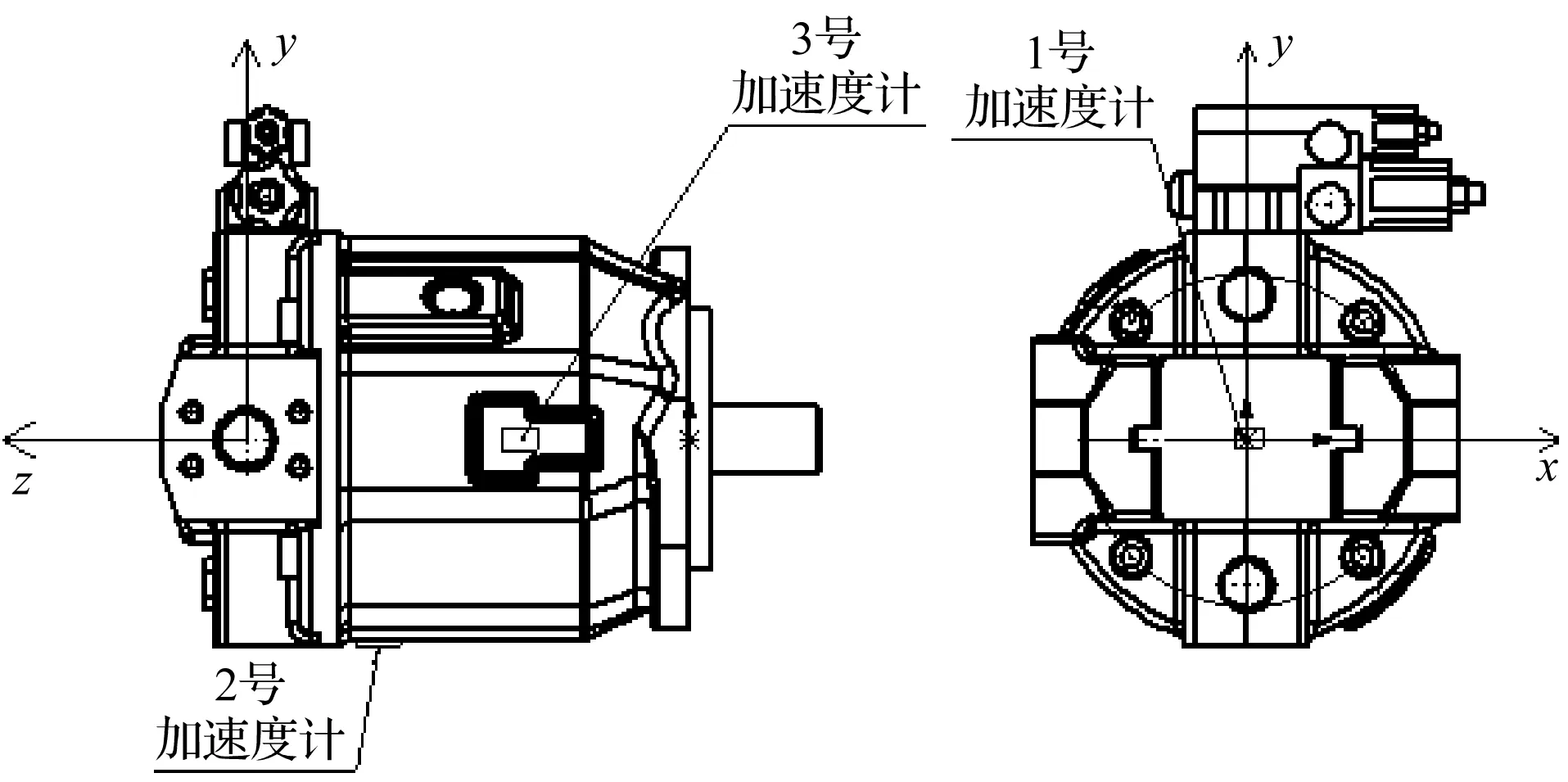
圖3 三軸加速度傳感器布點位置
三軸加速度傳感器方向如表1所示[17]。
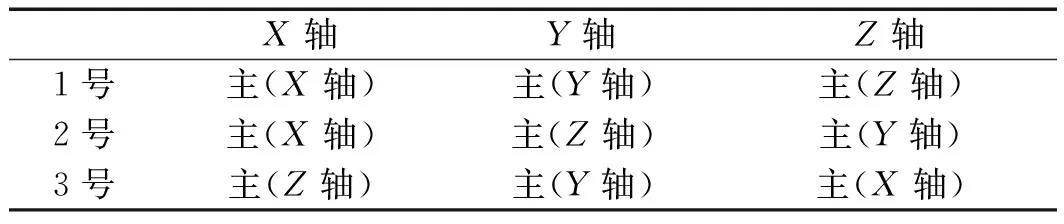
表1 三軸加速度傳感器方向說明
注:X軸,Y軸,Z軸-各傳感器的軸方向;主(X軸),主(Y軸),主(Z軸)-圖3中所示方向
4.2 實驗數據分析
實驗中采集了柱塞泵正常和松靴兩種模式下的信號分析,如圖4所示。

圖4 振動信號分析
其時域波形如圖4(a~b)所示,故障信號已經完全被噪聲淹沒,從時域信號中看不出任何明顯的故障特征,從而很難直接斷定柱塞泵的狀態。
而MED可以有效地提取信號中的微弱沖擊成分,經過MED降噪如圖4(c~d)所示,可以看到信號中周期性的沖擊成分明顯提高。每個沖擊之間的間隔約分別為0.04 s,0.02 s,對應轉軸頻率和松靴故障特征頻率。
松靴狀態MED去噪包絡譜如圖4(e)所示,可以看出,經過MED去噪和包絡解調,振動信號的峰值確實在轉軸頻率和其倍頻處,同故障機理分析保持一致。
4.3 故障特征提取
原始信號經過MED去噪,然后對去噪信號進行了EEMD分解,把振動信號分解為一系列本征模態函數,使其分布在不同的頻帶。為了精確、快速以及智能化的實現故障診斷,在EEMD處理信號之后,筆者根據IMF分量與原信號的相關性原則選取前5層進行奇異值分解,最終組成5維的特征向量。
本研究用EEMD對正常狀態和松靴狀態進行MED去噪,信號經過EEMD分解結果如圖5所示。
由圖5可以看出,經過EEMD分解之后,每個分量的沖擊特性都得到加強。
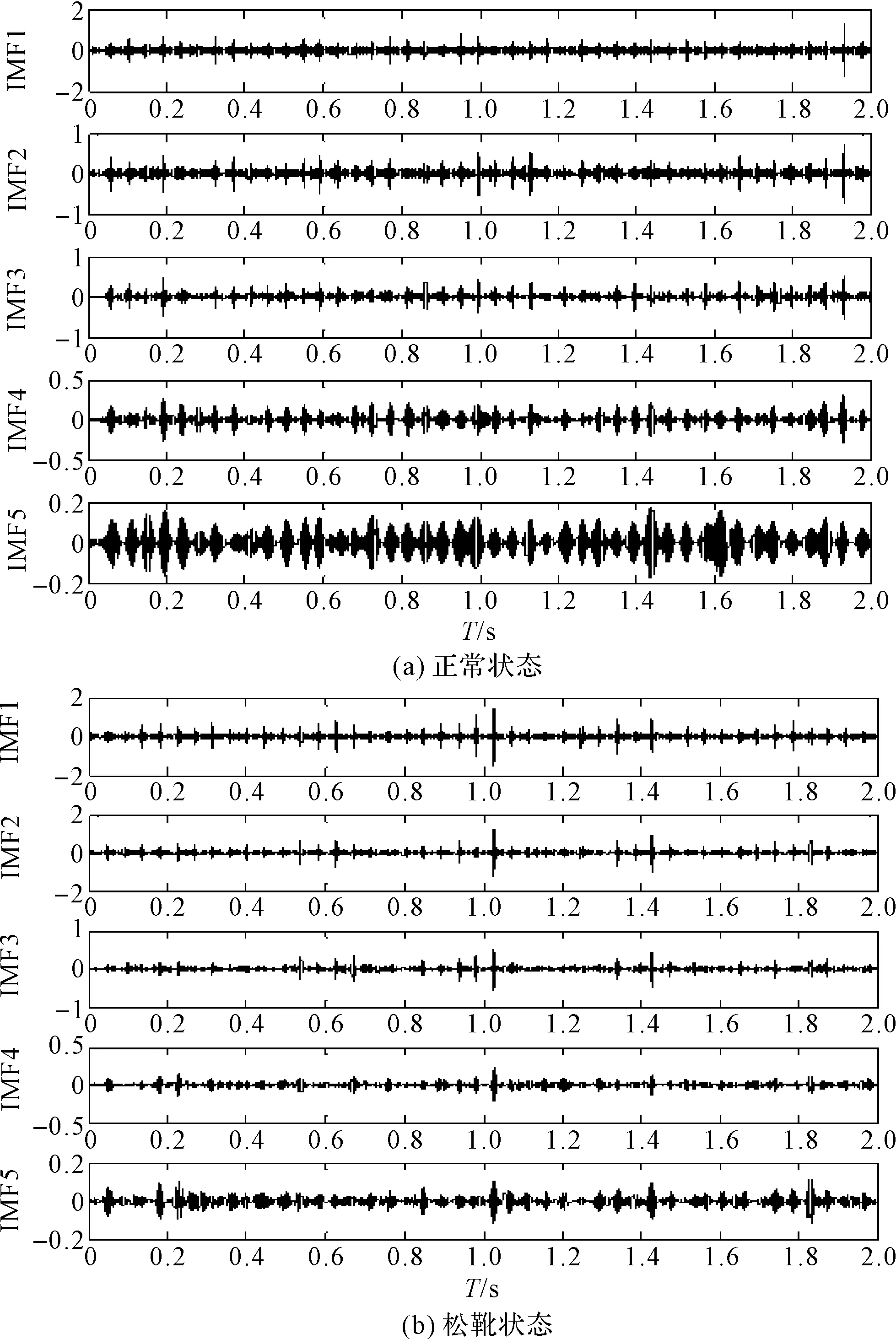
圖5 MED去噪信號經過EEMD分解
4.4 數據集分配
實驗借助于LabVIEW虛擬儀器和NI數據采集系統,采集了正常狀態和松靴故障模式下的振動信號。經過去噪,將其通過EEMD分解為一系列模態分量,對前5個分量再進行SVD分解,所以每種模式組成一個200×5的特征矩陣,最終將所有模式數據組合起來構成一個400×5特征向量矩陣,然后賦予相應的模式標簽。
數據分配與類別標簽如表2所示。

表2 數據分配與類別標簽
4.5 實驗結果分析
本文所有的計算都是建立在Matlab R2014a的平臺之上。為了能夠獲得可靠穩定的診斷模型,減小實驗誤差,本文采用交叉驗證法(Cross-validation)進行了20次訓練和測試求取均值。
實驗計算結果如表3所示。

表3 實驗結果分析
該實驗結果給出了采用不同的特征提取方法(MED+EEMD,EEMD)以及不同的模式識別算法(BP,SVM,ELM)時,軸向柱塞泵松靴故障的診斷結果。對于任一模式識別算法,采用MED+EEMD的特征提取方法,相比于僅通過EEMD的特征提取方法,可以獲得更高的診斷精度。對于任一特征提取方法,采用ELM模式識別算法可以獲得更高的診斷精度,同時ELM模式識別算法所需的訓練時間最短。
5 結束語
本文針對用EEMD在強噪聲環境下對松靴故障特征提取表現不佳,通過MED對柱塞泵松靴故障振動信號去噪,突出了信號的沖擊成分,增強了特征值提取的準確性,從而提高了分類精度。
(1)EEMD是一種自適應信號分解方法,其分解效果相對于EMD分解可以有效避免沖擊性信號引起的模態混疊,能夠更加準確地反映出故障信息;
(2)將MED和EEMD相結合的方法可以有效地提取出柱塞泵松靴故障特征。ELM分類器可以有效地對柱塞泵進行故障診斷。
本文通過實驗驗證了所提出的方法可以實現柱塞泵的松靴微弱故障的更高精度診斷。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2019年15期)2019-08-27 01:12:00
數學物理學報(2017年6期)2018-01-22 02:26:40
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
計算物理(2014年2期)2014-03-11 17:01:44
計算物理(2014年2期)2014-03-11 17:01:39