基于模糊神經網絡的人體摔倒特征參數算法研究
2020-04-02 09:27:30譚曉靜
山西大同大學學報(自然科學版) 2020年1期
關鍵詞:檢測
譚曉靜
(閩南理工學院電子與電氣工程學院,福建石獅362700)
我國隨著老齡化趨勢日趨明顯,針對老年人的健康監護等相關問題越來越受到政府和組織機構的重視。研究發現,老年人在運行狀態中有較高的致病率,伴隨摔倒,使其具有很高的住院率和死亡率[1]。關于國內外學者關注對老年人監控設備開發,對摔倒檢測及報警方面,做了很多研究[2-3]。在現有研究成果的基礎上,提出基于模糊神經網絡的人體摔倒檢測方案,利用運動數據、脈搏信號和溫度作為特征參量進行數據融合算法,通過網絡模型進行實驗驗證。
1 檢測控制系統硬件結構
人體溫度傳感器選用MAX30205MTA,工作電壓 2.7 ~3.3V,測溫范圍 370C ~ 390C,測量精度0.10C;運動狀態信號傳感器選用GY-9250,內部低壓差穩壓,供電電源3 ~5V,內置AD轉換器,16位數據輸出;脈搏心率傳感器選用MAX30102,主要用于智能監測設備用于心率和血氧監測,利用光反射(PPG)檢測信號,LED峰值波長660 nm/880 nm,采用5V 獨立電源,可實現電源始終維持供電狀態。系統硬件設計結構如圖1所示。

圖1 系統結構框圖
2 模糊神經網絡
2.1 模糊神經網絡模型
提出的模糊神經網絡共6層,模糊神經網絡結構如圖2所示。
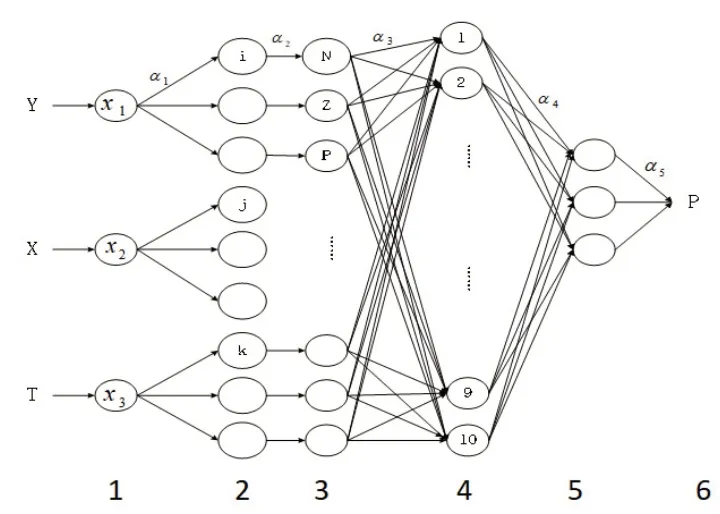
圖2 模糊神經網絡結構
其中,第1 層為輸入層,用于輸入人體的運動狀態、脈搏、體溫監測數據的信息,用Y,X,T表示,經線性化處理得到3 個輸入參數,用x1,x2,x3表示;
第2層對線性變換層,對輸入變量通過權值進行線性連接;
第3 層為模糊化層,主要對第1 層輸出量進行模糊化處理。通過計算隸屬函數,得到輸入點對于語言變量值模糊集合有最大隸屬度;通過模糊推理,用于實現模糊規則制定,測量模糊規則的適用度,選取符合實際判斷意義的模糊規則,用N、Z、P 代表模糊推理規則中的“負”、“零”、“正”;
第4層為歸一化層,用于實現對前層輸出結果的歸一化處理;
第5 層為去模糊化層,計算并輸出“正常N”,“摔倒S”,“心率不齊導致摔倒L”[4-5]所發生的概率;
第6層為反模糊化層,將模糊輸出量轉換成事故判定結果。
算法設計流程如圖3所示。

圖3 算法設計流程圖
2.2 模糊神經網絡機構
在模糊化處理中,選取合適的隸屬函數對計算網絡的輸出量有重要影響。根據模型建立的實際需求[6-7],利用隸屬度函數將輸入量以“N(負)”、“Z(零)”、“P(正)”表示,“N(負)”和“P(正)”采用S型函數隸屬表示,“Z(零)”采用高斯函數隸屬表示。模糊神經網絡的輸入節點有3 個,第2 層選取3 個模糊分割數對第1 層輸入量進行分割,節點數有9 個。推理模糊層每個參數有3種狀態,即模糊股則應該有33條規則,結合實際情況,選取10條具有實際判斷意義的模糊規則如下:
① if(Y is N)and(X is Z)and(T is N)then(結果為N);
② if(Y is N)and(X is N)and(T is N)then(結果為N);
③ if(Y is P)and(X is Z)and(T is N)then(結果為L);
④ if(Y is Z)and(X is P)and(T is N)then(結果為L);
⑤ if(Y is Z)and(X is Z)and(T is N)then(結果為L);
⑥ if(Y is N)and(X is N)and(T is P)then(結果為S);
⑦ if(Y is N)and(X is Z)and(T is P)then(結果為S);
⑧ if(Y is P)and(X is Z)and(T is Z)then(結果為S);
⑨ if(Y is P)and(X is P)and(T is P)then(結果為S);
⑩ if(Y is P)and(X is P)and(T is Z)then(結果為S)。
2.3 神經網絡各層單元計算
線性處理層:

其 中,A取Y,X,T,r取 值i,j,k,分別 取1,2,3。
模糊化層:
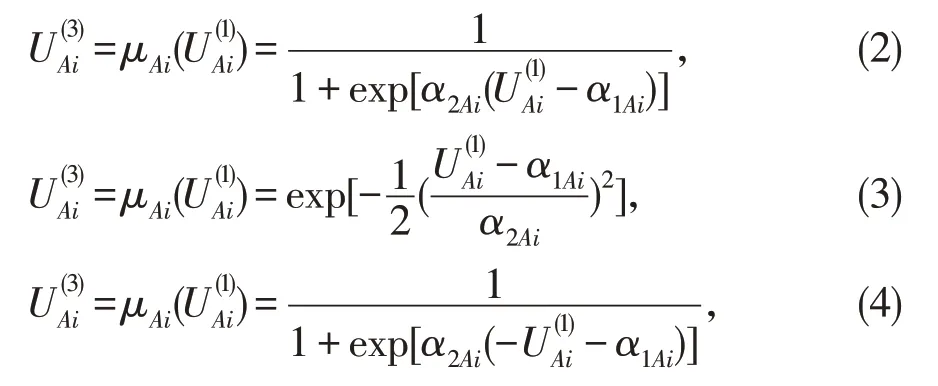
其中,A取(Y,X,T),i取(1,2,3),α1,α2為連接權值,選取任意值作為初始值,對其進行訓練可使改變隸屬函數參數發生改變。
模糊推理,輸入變量(x1,x2,x3)的隸屬度函數有3個,以y表示“N(負)”、“Z(零)”、“P(正)”3個狀態。

l為第四層節點個數。
歸一化層:
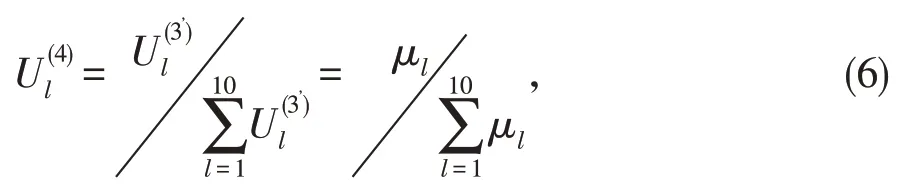
其中,l為去模糊化層的節點數,l取值(1,2,3,…,10)。
去模糊化層,該層主要根據“正常N”,“摔倒S”,“心率不齊導致摔倒L”所發生的概率。

利用加權平均法得到精確的輸出結果。

最終確定模糊神經網絡的拓撲結構為3-9-9-10-3-1。
2.4 改進BP神經網絡權值修正
有效訓練網絡權值,可使神經網絡實際輸出與期望輸出盡可能接近。網絡設計中權值α1,α2,α4采用L-M算法,參數在訓練時取最大值,當接近最佳值時,參數逐漸減小到零。開始學習時誤差較大,L-M算法采用高斯牛頓法,當誤差變小,使用梯度下降法[8-9]。
調整高斯牛頓方法的權重公式如下:

其中,H為損失函數在w(k)處的海塞陣列,?E為損失函數E在w(k)處的導數陣列,DH是海塞陣列的對角排列陣列。μ的調整公式:

3 算法模擬仿真
實驗測試人員為35~55歲的人群,采集50組樣本數據,進行處理作為樣本數據,選取其中30組訓練神經網絡模型,其過程在MATLAB 環境下進行仿真測試。在模糊神經網絡中設置訓練誤差為1×10-5,最大訓練次數為1000次,分析結果可以看出,經過大概26 次迭代計算后,訓練誤差為6.1709×10-6,滿足訓練要求。網絡訓練過程如圖4所示。

圖4 網絡訓練誤差曲線圖
4 結果分析
選取實驗數據10 組作為測試樣本,在預定模型進行50 次測試,實驗數據測試結果用表1表示,實驗證明設計的摔倒報警器能準確檢測有無摔倒以及事故情況下出現摔倒的概率。

表1 實驗數據測試結果
5 結語
以多數據融合為指導思想,研究利用多種信號綜合進行摔倒的檢測,由于老年人在摔倒時往往會出現短時間的脈搏突變,以及考慮到部分老人患心腦疾病,利用脈搏判斷進一步輔助摔倒檢測。根據人體運動狀態將人體摔倒過程的3個不同的狀態組成,正常行走狀態,由于物理原因導致摔倒,心率不齊導致摔倒。在此基礎上,提出了一種基于模糊控制的神經網絡模型,通過相關的判斷算法,輔助判斷摔倒出現的概率,可大大提高摔倒檢測的準確率,降低誤報率。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
