論無人駕駛汽車交通事故侵權責任
2020-04-05 18:48:10杜明強冷傳莉
安徽師范大學學報 2020年1期
杜明強 冷傳莉
關鍵詞:無人駕駛汽車;法律人格;歸責原則;交通事故責任
摘 要:在無人駕駛領域,依靠數據+算法支撐的智能系統將全權替代人類駕駛行為,無人駕駛汽車也因此具備高度“自主性”。其所引發交通事故侵權致損時,至少在責任主體認定、二元歸責原則適用和責任類型劃分等方面給現行侵權法提出挑戰。而賦予無人駕駛汽車獨立法律人格既與法理不符,也難應對司法實踐。故我國侵權法宜通過確立三元歸責原則體系(過錯+無過錯+公平責任),建構“產品責任+機動車交通事故責任”相結合的適用規則,并以建立無人駕駛汽車責任強制保險為配套機制的進路加以應對。
中圖分類號:D913文獻標志碼:A文章編號:1001-2435(2020)02-0129-11
On Traffic Accidents Tort Liabilities of Driverless Vehicles
DU Ming-qiang,LENG Chuan-li(School of Law,Guizhou University,Guiyang 550025,China)
Key words:driverless vehicles;legal personality;the principle of imputation; traffic accident liability
Abstract:In the unmanned driving filed,the intelligent system supported by data and algorithms combination will completely replace humans driving behavior and full autonomous vehicles also have highly “autonomy”. When a traffic accident caused by driverless vehicles infringes on the rights of others,it will at least challenge the current tort laws following aspects,including the identification of subject of liability,the application of the principle of the fault and no-fault imputation,and the division of the liabilitys types. However,giving driverless vehicles independent legal personality is inconsistent with legal principles and difficult to deal with the judicial practice. Therefore,Chinas tort law should establish the ternary imputation principle system(fault + no-fault + fair liability),construct the applicable rules combining“product liability + motor vehicle traffic accident liability”,and establish the compulsory liability insurance for driverless vehicles.
一、問題的提出
在無人駕駛汽車(下文簡稱“無人車”)領域,人們普遍關心的是其交通事故侵權及責任承擔問題。盡管研發無人車之初衷在于減免交通事故,但不可能做到絕對安全。如近期谷歌無人車與公交車碰撞案、優步無人車致人死亡案等事故的發生使得無人駕駛技術的安全性頗受質疑,引發公眾對其侵權責任承擔等法律問題的憂慮。既然未來人類駕駛將被自動駕駛所取代,那么以人類駕駛為基礎建構的交通事故責任制度是否還能適用?或在多大程度上可以適用?既有侵權責任規則是否需要更新以及如何更新?對此,理論和實務界都正在積極探索解決之道,各種學說主張紛紛涌現。本文以無人車之界定為起點,致力于研究其交通事故侵權責任問題,探究我國無人車法律規制路徑,期冀對未來立法有所裨益。
二、無人車的基本界定
(一)無人車的概念及技術等級
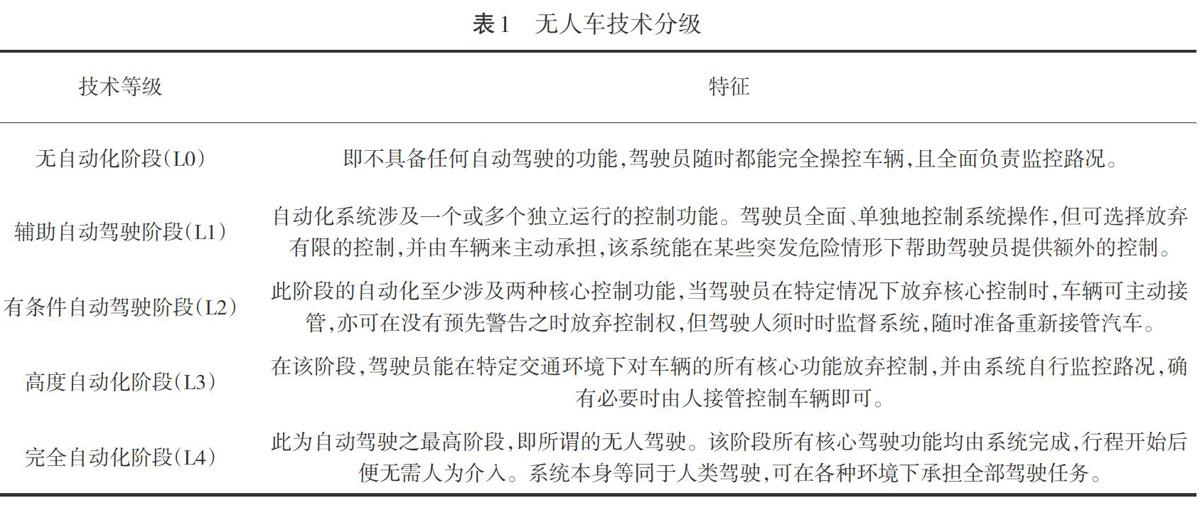
當前,各國立法并未對無人駕駛的概念達成共識。在我國,2017年《北京市關于加快推進自動駕駛車輛道路測試有關工作的指導意見(試行)》(簡稱《意見》)將其定義為:在機動車上配置自駕系統,無需人類駕駛員執行物理性駕駛操作就能對車輛行駛任務進行決策和指導,并代替駕駛員操控完成安全行駛的車輛。而關于其技術等級,目前也無法定標準。參照國際自動機工程師學會(SAE)的分級標準,并依據系統的智能程度,可對自動化技術作如下(表1)分級:
嚴格地講,自動駕駛不等于無人駕駛,無人駕駛為自動駕駛的最高級,只有當車輛駕駛實現完全自動化(即L4階段),才可稱其為無人車。同樣,輔助駕駛也不是自動駕駛,只是為駕駛人提供某些駕駛援助,系統并不直接承擔駕駛任務。而當進入有條件自動駕駛或高度自動化階段,才會出現真正自動駕駛的情形。當然,這兩個階段的共同特征是:在特定情形下需要人類對汽車的運行進行接管和控制,這也是區別于無人駕駛階段的顯著標志。但需指出的是,無人車也并非指汽車完全脫離人的控制,僅在物理操作上無需由人類親自實施駕駛行為,依然要由人來實施點擊按鈕、輸入語音等行為來開啟駕駛模式。實際上,目前各國的自駕技術多處于輔助駕駛和有條件自動化階段,尚未能實現完全自動化,不過我們離全自動時代并不遙遠。因為不少發達國家和我國都力圖在人工智能領域贏得全球科技競爭主動權,競相研發高度自動駕駛技術,努力向無人駕駛的目標邁進。
(二)無人車的特殊價值
作為人工智能的典例,無人車的價值功能顯著,包括但不限于如下方面:一是減少交通事故發生。據統計,在美國每年引發交通事故的諸多因素中,人為原因的占比為93%,主要表現為酒駕、超速、疲勞駕駛、經驗不足等情形。[1]171而無人車基本能克服人類駕駛的不足,不會因情緒波動引發交通事故,可降低事故發生率,提高安全指數。二是緩解交通擁堵。堵車已成今日之城市病,其要因在于車輛劇增和對道路的利用率不足。而一旦無人車投入使用,即使現有道路容量不變,因其更加安全、精準和強預測性,也能大幅縮短車間距,提高道路利用率。[2]18三是增加特定人群的行動自由。傳統汽車駕駛行為較為復雜,對個人體能、視力和技術都有較高要求,還必須通過學習考核才獲駕駛資格。可見,人類駕駛的成本較高。而對部分特定人群而言(如老人、殘障人等)根本無法獨自去體驗駕駛汽車帶來的移動便利。[3]1049而無人車則可助力這些人群實現駕駛夢,擴增其行動自由。
但須注意的是,無人駕駛技術本身價值與風險并存,在服務于人之時同樣附帶系列風險,其中交通安全風險最為嚴重,直接關系人的生命財產安全。為此,下文擬以L4階段即真正的無人車為研究對象,探索這一新興人工智能對現行法的新挑戰和沖擊。
三、無人車引發的侵權法挑戰
(一)責任主體:無人車法律人格論爭
無人車法律地位的厘定,乃為有針對性地解決其侵權責任承擔的前提。而對于具有人工智能特性的無人車可否被賦予法律人格,學界尚存爭議,且未達成共識。概言之,目前主要有三種學說:即客體說、折中說和主體說,其分別將無人車視為法律上的物、電子奴隸和具備獨立法律人格。
1.客體說
客體說認為:智能機器人只能作為權利的客體。人工智能作為物的本質不因其自主性而改變,其雖能單獨進行部分“意思表示”,但難為其行為擔責。而作為人工智能的設計者之自然人和公司,其應具備完全責任能力并有與之相關的權利和義務。[4]106事實上,智能機器人不能理解和回應法律的行止要求、不能理解財產對其產生的價值,欲實現其責任限定效果就賦予其法律人格之做法有違正義的基本要求,故在理論層面賦予人工智能以法律人格亦是無法成立的。[5]116對此,有學者提出:因智能機器人具有交互性、自主性和適應性,其應被視為動物而不是產品或物品,[6]379不過動物在法律上還是物,尚不具備主體資格。鑒此,人工智能無論以何種方式承擔責任,最終責任承擔者都是自然人或法人,那么賦予其“法律人格”就顯得多此一舉。[7]80因此,無人車作為人工智能產品之范疇,理應將其作為客體對待。
2.折中說
折中說認為:無人車不具備人類特殊的肉體和情感特征,能一直不停地工作,可將其視為不知疲倦的機器,只有行為能力而無權利能力,故其所造成的后果應歸屬于它的所有者。[8]53由于人工智能的自主性會導致不可預見的失控風險,以客體待之勢必阻礙其發展。故無人車雖不具備自然人的法人格,但可賦予其電子人格,域外立法對此已有所回應。2016年2月美國高速公路局表示,谷歌的自駕系統可被視為“駕駛員”。[9]2017年2月歐洲議會通過決議,建議從長期著眼為機器人創設特定的法律地位,至少要明確最精密的自主機器人具備“電子人”資格,能夠對其引發的損害擔責。[10]41可見,折中說在域外立法實踐已有存在空間。
3.主體說
主體說認為:人工智能乃人類社會發展的必然產物,具有高度智慧性、有獨立行為和決策能力,其性質有別于傳統的工具或代理人。強人工智能時期可能出現具有擬制法律人格的智能機器人,將會對傳統法制造成顛覆性變革。[11]13法律既可賦予公司以法律人格,那么人工智能也不應例外。[12]174而就具體的無人車而言,應賦予其法律人格,為其設立特定的責任基金賬戶,讓其為自身行為獨自擔責。[13]29因為在完全自動駕駛狀態下,是由智能系統在運行中自主作決斷,該系統符合駕駛人員的現行法定義。此時人的駕駛人身份已不復存在,無人車智能系統基于大數據的自我學習使其在某種程度上具備了“思考力”,而且已有實驗證明其會像人類一樣思考。[14]100故宜將無人車定性為有獨立意思表示能力的特殊主體。主張此觀點的學者還從權利發展的歷史規律、擬制人格的制度功能、優化交通事故侵權責任的分配以及個別國家或地區的立法等方面論證賦予無人車以法律人格的可行性和必要性。[15]20可見,學者們試圖證成無人車具備獨立法律人格,以便較好解決其所造成的侵權損害賠償難題。
4. 無人車法律人格之妥適定位
依民法原理,法律人格是指法律認可某一主體享有權利和承擔義務的資格,包括自然人和法律擬制主體(如法人)。對于自然人,法律無條件承認其法律主體資格;而擬制主體的法人格需經由法律明確規定或特定的認可規則方可取得(如非法人組織的設立)。在現行法體系下,因作為人工智能之無人車具備一定的自主學習能力、行動能力或像人一樣的思考能力,其便對傳統民事主體制度構成新的挑戰,也給實踐帶來一定困惑。若法律人格有無之爭議無法確定,則會導致人工智能發展缺乏法律價值指引。[16]99而在確立是否賦予無人車法律人格時,至少要考量以下因素:一是實質性要件,包括是否具備意思表示能力和獨立財產。無人車雖能按照“感知—思考—行動”的機制運行,這種行為能否被認定為法律上的意思能力,還有待商榷。至于獨立財產,盡管人工智能/無人車有可能獲得某些財產,但其所做出的“意思表示”實為無人車控制人的意思表示,因而法律關系的主體應是控制人自己,其所獲得的財產也應歸屬于控制人,無人本身并不能擁有獨立的財產。[17]70在此意義上,無人車也不具備相應的責任能力,其并不滿足上述實質要件。二是形式要件,人工智能/無人車的法律人格到底在法律上該如何認定,是自然取得抑或是行政許可?其身份是否需要登記等?相較而言,形式要件的實現較為簡單,關鍵取決于國家立法的態度。迄今已有少數國家在一定程度上認可智能機器人具備“法律人格”,如日本授予寵物機器人帕羅以“戶籍”,美國將谷歌的自駕系統視為“駕駛員”,沙特政府已公開授予“女性”機器人索菲亞公民身份。可見,現實為主體說提供了部分實踐支撐。
3.雇主替代責任說。該說認為,可參照雇主替代責任規則,由汽車所有權人擔責。有人認為,可將無人車類比為所有人所雇傭的“駕駛員”,當汽車按照所有人的指令行駛時,如果汽車違反交規發生事故致損,就應由所有人擔責,就好比雇主替雇員承擔替代責任一樣。[25]133在現行法下,雇主承擔責任的前提是雇員在履職時侵權,若將無人車看作事實上的雇員;為了明確雇主責任,就必須對無人車的職務行為和非職務行為之標準進行判定。不過參照適用該理論有其合理性,因為生產者、使用人分別在無人車工作中獲得了經濟利益和運行利益,由他們承擔風險與權利義務相一致理論相符。概言之,如果將無人車擬制為雇員的賦值成立,便可以為其確定一個能替代承擔侵權責任的主體。
4.參照動物侵權規則說。該說主張參照動物侵權規則,由汽車所有者承擔責任。有學者將無人車與犬類相對比后指出二者極其相似,它們都具有一定程度的自主思考、行動及致害能力,其存在都是為了更好服務于人類。而且,犬類動物侵權之所以被課以嚴格責任,正是基于犬類本身危險之考量。歷史上還存在過法庭將汽車與動物類比的先例,“Lewis v.Amorous案”的判決就曾作出如下經典表述:“我們應當害怕的并非汽車這個怪物,而是汽車背后兇猛的人類,汽車不能與狂犬、邪惡的公牛、兇狠的騾子等歸為一類。”但隨著無人駕駛技術的深入發展,我們擔心的不再是無人車背后的人類,而是可能失控的無人車。[26]117
5.參照疫苗事故侵權規則說。該說主張設立大規模救助基金來解決無人車侵權責任問題。因歷史上曾出現過大量類似于無人車一樣令人震驚的新技術、新產品,譬如20世紀中葉美國疫苗行業的法律規制歷程就值得參鑒。疫苗對人類來講是利弊混合的產品,在促進人類健康的同時隱含著難以預測的風險。20世紀50-80年代,美國疫苗企業曾遭遇過兩次疫苗侵權的司法訴訟,其行業發展嚴重受挫。為此,美國政府才通過制定《兒童疫苗損害國家賠償法》,特別引入疫苗致損的國家賠償基金制度,才使得疫苗產業步入正軌,最終增進社會福祉。[27]782同樣,為促進無人車產業發展,國家可通過立法設立類似于救濟疫苗致損的大規模基金。
(四)無人車侵權責任承擔的類型分析
綜上可知,無人車侵權的最終承擔責任主體可歸結為三類:一是由使用者一方承擔,如機動車交通事故責任說、雇主替代責任說等;二是由生產者一方擔責,如產品責任說;三是引入責任保險制度,分散社會風險,由保險人承擔賠付責任,如參照疫苗侵權規則說。此外,還可能由無人車獨立擔責,但本文不支持該主張。無人車本身沒有法律人格,也不具備獨立責任能力,對此不再贅述。
首先,讓使用者擔責并不合理。其原因在于:其一,使用人責任缺乏必要的侵權行為要件。依據無人車運行原理,是智能系統獨自承擔駕駛任務,也即駕駛行為這一可能的侵權行為不是由使用人所實施的。因為無人車通過“感知—計劃—行動”的運行機制完成整個駕駛行為,即由智能系統先通過傳感器和環境數據相互連接,基于這些數據分析自主規劃行駛的最佳路徑,然后系統自主決定執行規劃指令,完成汽車運行。因此,使用人并無過錯,也不存在侵權行為,則無需擔責。其二,從法理上講,也不能根據風險開啟理論和報償理論主張由使用者擔責。有論者認為,無人車屬于高度危險物,使用人/乘車人開啟了一定的風險,當風險實現時乘車人難辭其咎,畢竟開啟風險的行為可能增加損害發生的可能性。[28]39而且,依報償理論,從事危險活動或占有、使用危險物的人從該活動中有利所獲,基于利益享受著承擔風險之原則,其應擔責[29]78。據此,使用人在無人車行使過程中獲得了運行利益,故需承擔無過錯責任。這種觀點在理論上看似成立,但其忽略了侵權責任構成要件中的因果關系。事實上無論是使用人“開啟風險”還是“享有運行利益”,都與損害事實的發生之間不存在直接因果關系,即上述行為并非是致害的根本原因。依此兩種理論將損害責任分配給使用人就顯得非常牽強,故讓使用人擔責的理由不能成立。此外,如果讓使用人承擔高度危險責任,雖能較好保護受害人利益,但會讓生產者得以輕松免責,進而讓使用人替智能系統的質量問題買單,這將明顯加重車輛使用人負擔,顯失公平。
其次,由生產者承擔主要責任。盡管在無人車交通侵權致損時難以證明車輛本身的缺陷,但生產者仍須承擔第一位的責任。在立法層面,依《歐盟機器人民事法律規則》之規定,“根據目前關于產品責任的法律框架——產品的制造者對于產品故障(malfunction)負責……適用于機器人或者人工智能造成的損害”。2017年6月,德國最新修訂的《道路交通法》允許自動駕駛車輛的使用,并從駕駛人義務內容的調整、強制保險賠償額度的上調和事故證據的保存三個方面強化對受害人之保護。[30]151美國立法也要求“自駕車制造商和其他利益主體對車輛數據 安全、黑客攻擊、車主隱私威脅等承擔保障義務”。[31]15我國最高人民法院《關于審理道路交通事故損害賠償案件適用法律若干問題的解釋》第12條規定:“機動車存在產品缺陷導致交通事故造成損害,當事人請求生產者或者銷售者依照《侵權責任法》第五章的規定承擔賠償責任的,人民法院應予以支持。”可見,將主要責任分配給生產者有相應的請求權基礎。
從學理上講,由生產者承擔責任也有其正當性。其一,依據自動駕駛的原理,駕駛行為由系統全程掌控,發生交通事故時最大的可能就是智能系統本身存在故障或者車輛存在程序設計瑕疵,此時將責任分配給毫無過錯的使用者,實為不妥;其二,從預防損害發生角度看,生產者可以控制和編寫智能系統的算法程序,讓其承擔基礎性義務的產品責任,可以督促其投入更多精力發展安全技術,增強無人車的安全性能。[32]32其三,從對受害人的救濟角度看,在無人車生產、銷售過程中,生產者為最大受益者,應當承擔瑕疵擔保義務。加之其賠償能力遠強于消費者,讓其擔責可實現受害人的充分救濟,同時也符合消費者對車輛安全性的合理期待標準。[33]502其四,讓生產者擔責并不會阻礙無人車產業的發展。因為讓生產者擔責可增強消費者對無人駕駛技術的信心,可以放心購買和使用該類產品,反而還會推動無人車的普及和應用。事實上,生產者分散風險的能力較強,可以通過提高銷售價格降成本轉移至消費者。因此,對于無人車而言,其智能操控系統源于算法、傳感器、控制器和執行器等,這些都可被包括在“產品”范圍內。故依照產品責任解決交通侵權問題,除了上述理由外,還可以規避人工智能對人在主體方面的替代所可能產生的疑難問題。[34]46在此基礎上,法律應該規定的是如何證明無人車這一特殊產品存在缺陷以及缺陷與損害之間的因果關系問題。
最后,關于建立無人車責任保險制度。責任保險制度的功能在于分散風險,雖有必要,但不能解決歸責原則的問題。故須在先確立責任主體的基礎上再通過保險制度來進行合理救濟,對此下文將作具體分析。
四、我國民法典侵權責任編的調整及應對
總體來看,面對無人車的交通侵權行為,現行制度存在規整障礙。侵權法的相關規則須作調整,方可應對無人車所帶來的新挑戰。立基于經驗主義的視角,借民法典編纂之良機,在應對無人車的侵權責任時,未來侵權責任編可從歸責原則的更新、具體責任分配模式的確立以及配套機制的建構等方面予以改進。
(一)引入公平責任原則,確立三元歸責原則體系
我國《民法總則》第6條在立法層面明確了公平原則的基本原則地位。在侵權法領域,公平原則具體化為公平責任原則。所謂公平責任,是指當事人各方對損害發生均無過錯之情況下,由法院根據公平理念,并在考慮各方財產狀況及其他情況的基礎上,責令加害人適當補償受害人的財產損失。[35]73《民法通則》第106條第3款關于“沒有過錯,但法律規定應當承擔民事責任的,應當承擔民事責任”之規定,《侵權責任法》第24條以及《民法典侵權責任編草案》第1186條關于“受害人和行為人對損害發生沒有過錯的,依照法律規定由雙方分擔損失”的規定,都是公平責任原則確立的重要法律依據。據此,公平責任原則適用的一個基本前提是當事人無過錯。而“無過錯”應包括三層含義:“一是不能推定行為人有過錯。換言之,不能以過錯推定的辦法來確定行為人有過錯。二是不能找到有過錯的當事人。三是確定一方或雙方的過錯,顯失公平”。[36]179現行法中公平責任原則是在法無明確規定適用無過錯責任原則,而適用過錯責任原則又會導致明顯不公之時下才予以適用,是對兩種歸責原則的補充。
在無人車交通事故侵權領域,依自駕系統的運行原理,其責任主要不是人的責任,而是車的責任。因為沒有人的駕駛行為,使用人的過錯也難以認定。既然不能讓使用人承擔過錯責任,那似乎要由生產者承擔無過錯責任。但生產者擔責的前提是——無人車本身確實存在缺陷。如果生產者在制造汽車時確因疏忽而導致產品不符合國家安全標準,那么無疑可將車輛認定為存在產品缺陷,受害人可依法向生產者或銷售者主張損害賠償。但問題是,汽車在投入使用時符合安全標準卻仍然造成他人損害,此時是否還能向生產者主張無過錯責任?如果作肯定回答,那么會對生產者的技術要求又過于苛刻;如果否定回答,則會導致受害人的損失無法得以彌補。據此,筆者認為可引入公平責任原則,由汽車的實際使用人承擔相應的公平補償責任。其理由在于:第一,讓使用人對非缺陷的車輛負部分責任,基本符合危險責任的一般原理。危險責任的正當性,主要來自于控制人開啟了危險,其能夠更好地控制危險以及控制人從危險中獲益。畢竟使用人存在開啟危險的行為,而生產者沒有直接開啟危險,且使用人在此過程中享有承運利益。[37]135在不能將此“開啟危險行為”界定為“駕駛行為”的情況下,將其作為承擔公平責任的條件就具有合理性。第二,讓汽車使用人承擔公平責任在利益平衡上不會失當。畢竟無人車的安全系數高,發生交通事故概率低。即使發生事故致損,汽車所有人首先可以通過投保來轉移自己的風險,而且在確定責任賠償限額時,依照公平責任原則并不要求對受害人全額賠償,不會過度加重使用人的經濟負擔。因此,在無人駕駛交通事故侵權責任領域引入公平責任原則,能彌補傳統過錯/無過錯責任二元歸責體系之不足,可在一定程度上填補受害人的損害,平衡各方當事人利益。
綜上,本文認為,在三元歸責體系下,由生產者對車輛的缺陷致損承擔無過錯責任;如果使用人對損害確有過錯,則適用機動車交通事故責任——即過錯責任;如果發生交通事故致損時使用人無過錯,又無法確定車輛本身的缺陷,不能讓生產者承擔無過錯責任,則由使用人承擔公平補償責任。
(二)確立“機動車交通事故責任+產品責任”共力模式
1.使用人機動車交通事故責任的適用空間
一般而言,在無人駕駛階段,由于智能系統實質性地承擔駕駛任務,使用人無需也不能實施駕駛行為,因而現行機動車交通事故責任規則難以繼續適用。但例外情況下,在使用者未履行恰當義務時,現行法中的責任規則仍有適用空間。具體為:一是使用人對車輛沒有盡到合理的維護和保養義務,導致車輛故障引發交通事故,應由其承擔過錯侵權責任。雖然使用人并不親自實施駕駛行為,但負有保證車輛適行的義務。如果在運行過程中系統發出維修警示,使用人仍置之不理,在遇到系統更新時尚未及時更新系統,發生事故后可由其承擔責任。但這種情況要作區分,如果使用者為無接管能力人,則需將責任分配給生產者。二是使用人存在對無人車進行不當使用情形,如存在操作不當、故意干擾運行中的智能系統、在惡劣天氣或者復雜道路條件下依然開啟自動駕駛行為,由此引發的交通事故致損則需由使用人承擔責任。概言之,在無人駕駛模式開啟時,只有使用人存在顯而易見的過錯時,才能由其承擔過錯侵權責任;而在系統獨立駕駛而引發交通事故之時,應推定使用人無過錯,依照公平責任原則承擔不超過10%的賠償責任。
從法理上講,使用人在車輛運行中享有特殊的“運行利益”,讓其分擔無人車所帶來的部分運行危險責任,基本符合“利益與風險共存”的報償理論和優者負擔的基本原則。所謂“優者負擔原則”是指通過對機動車性能、速度、結構剛度等方面的衡量,由安全性能高、危險回避能力強、破壞力大的一方承擔更多的損害賠償責任。[38]72在交通運行關系中,與無人車相比,受害人多處于相對弱勢地位,無人車的破壞力、危險程度都要高于受害人;即使在受害人有過錯的情形下,根據優者負擔的原則,也要對受害人過錯程度進行打折。對此,梁慧星認為:這一折扣比例應該為50%。也即,如果行人在交通事故中的過錯比例100%,考慮優者負擔原則應扣除50%,再根據過失相抵的規定判定機動車方承擔50%的責任,行人可以得到50%的賠償。[39]還有學者認為在城市包容性發展的要求下,從演化博弈論的視角論證該比例也應從10%提高至50%。[40]97對此,我們認為,在無人車致人損害時,若對于無過錯的使用人強制分配50%的高賠償額,這既會加重使用人的負擔又有失公允,還不利于民眾守法意識的塑造。因為采取法定高額賠償比例,還可能會誘使部分行人犯錯誤,進而承受不必要的損失。從我國司法實踐來看,《道路交通安全法》第76條第2款關于10%賠償責任的規定已實施十余年,且基本能維系加害人和受害人間的利益平衡。這為無人車侵權時繼續參照適用該條款提供了一定的實踐基礎,故確定10%的比例能與現行法有效銜接,也能契合侵權法的立法精神。因此,在無法適用生產者產品責任之時,無人車的使用人也不能完全免責,應當承擔一定的公平責任。只不過在責任分配上,宜采以產品責任為原則,交通事故責任為例外,公平責任為補充的責任模式。
2.適用生產者產品責任之條件及免責事由
在確定生產者承擔產品責任之基礎上,需要進一步確認產品缺陷及免責事由的范圍。從現行產品缺陷的類型來看,制造缺陷是指該產品本身與設計意圖不一致的情形,由于該產品未達到生產者設計的既定標準,故不難判斷其是否存在制造缺陷。設計缺陷和警示缺陷,是指產品雖合乎設計意圖,但該設計本身或者由于缺乏足夠的使用說明或警示,導致產品存在不合理的危險,欠缺安全性能。[41]499對無人車而言,因其具備高度自主性,能自主學習,上述三種缺陷只能是原始的產品缺陷,難以涵括無人車隱含在其學習能力中的學習缺陷。而且這種學習缺陷又可分為智能系統自身學習缺陷和使用人教育指導缺陷。因此,要從事實上認定僅僅由無人車生產者負責的缺陷就顯得非常困難。在此意義上,無人車產品缺陷之認定更多地應是一個價值考量問題,而非純粹的事實認定問題。對此兩種可能的路徑選擇,一是按照正在制定的國家標準或行業標準來予以判斷,而由于無人車產品的投產通常都得符合這一標準,故此標準無疑對生產者或銷售者過分寬容。二是只要事故發生不因使用人或第三人過錯所致,便直接推定產品存在缺陷。[42]41本文贊成采取第二種認定標準,因為無人車運行中,很容易通過技術手段(如安裝行車記錄儀、黑匣子等)解決使用人是否存在操作不當等行為,一旦排除使用人過錯,則直接推定產品缺陷的存在而由生產者擔責。此外,由于無人車屬于新興技術產品,也可被歸類為高度危險物,如果不賦予生產者、設計者承擔符合公正觀念的責任,廣大消費者群體會質疑生產者們只是為了純粹功利目的而將無人車推向市場,這對無人車產業發展反而不利。只有當汽車制造商敢于且愿意為其行為負責時,無人車的質量才能取得公眾的信任,這也是眾多制造商主動聲明愿意為自己所生產的無人車致損擔責的原因所在。如沃爾沃總裁宣稱將“對其自動駕駛模式下汽車造成的損失承擔全部責任”。[43]因此,在無人車的發展過程中,安全是根本前提,再怎么強調其重要性都不為過。且不能以生產者責任過重而阻礙無人車產業發展為擋箭牌,任何先進技術的發明和運用必須以服務于人為目的,故生產者始終要以消費者的人身和財產安全為最高目標。
在生產者免責事由的認定上,除上文所述由使用者擔責之情形外,還包括因第三人行為、受害人故意等原因。但生產者不能以“技術中立原則”為由免責,因為該原則不再關注生產者的主觀要件和產品有無缺陷,不利于維護受害者利益和安全秩序。而對于《產品質量法》第41條所確立的三種免責事由,在適用于無人車侵權時需作限制解釋,除第一類“未將產品投入流通的”可直接適用外,第二類中的“缺陷”就只能包括“致損事故發生不因使用人過錯所致,便直接推定產品存在缺陷”。第三類中“流通時的科學技術水平”,不能只以國內科技水平為標準,而應綜合采用國際上最先進的科技水平為準。因為有能力研究無人車的企業,其科技水平本身就可以代表國內最先進水平,如再單以國內標準來判定,無異于讓生產者自定標準,加上這些企業往往財力雄厚,整合資源能力較強,極有可能以自定標準來影響行業標準甚至國家標準,這將不利于消費者的權益保護。
(三)建立無人車交通事故責任強制保險制度
在無人車交通侵權責任承擔的解釋規則下,從理論上講可確立過錯+無過錯+公平責任的三元歸責原則體系,也能證成由生產者承擔產品責任之正當性。但如果缺乏相應的制度配套措施,實踐中還是可能會給生產者的技術創新造成不利影響,發生事故后不斷出現的侵權之訴會讓生產者難以聚焦于技術革新。加之無人車智能系統本身的復雜性決定其事故鑒定工作復雜而漫長,難以高效填補受害者損失。對此,需通過保險渠道來應對無人車的交通安全風險。比較法上,英國于2018年7月通過的《自動與電動汽車法案》就對自動駕駛汽車的保險和責任問題進行了專門規定。依據該法案,自動駕駛汽車在“自動駕駛”狀態下致人損害時,根據車輛的投保情況,分別由保險人或汽車所有人先對損失擔責。若未投保,則由所有人擔責。保險人擔責的條件為:①事故是由自駕車在英國境內的道路或其他公共場所運行所致;②發生事故時車輛已投保;③被保險人或其他人的損害與事故發生有因果關系。但若損害是因車輛控制人或受害人所致,則可減免保險人或所有人的責任。若損害由第三人所致,保險人或所有人先行賠付后對第三人追償權。[44]在德國,由聯邦議院通過的《道路交通法第八修正案》正式將自動駕駛汽車納入立法,并加重了對保險金額的限制,明確規定因自駕車的系統故障導致人員傷亡的,最高賠償額從500萬歐元提高到1000萬歐元。[45]在國內,北京市制定的《意見》和《自動駕駛車輛道路測試管理實施細則》中要求自動駕駛汽車的測試主體應購買每車不低于500萬人民幣的交通事故責任保險或提供不低于500萬元的賠償保函。
可見,建立責任保險制度已成各國立法共識。當無人車發生交通事故侵權時,首先通過責任保險來救濟受害人,只有在保險無法填補損害時,才考慮由生產者、使用人來賠償。但需要注意的是,無人駕駛領域的責任強制保險有其特殊性,應當定性為“生產者強制責任保險”。因為無人車引發的交通事故責任多由生產者承擔,即生產者成為主要責任主體。既然責任主體為生產者,其就對保險標的具有保險利益,故由生產者購買保險符合保險法原理。其次,由生產者購買保險,能保證每一臺車輛在投入使用前就得以承保,一旦發生事故,受害人便可及時獲得賠償。再者,從保費成本上考慮,無人車的保費、保險金額較高,生產者較使用人而言更有能力承擔這筆高額保費。因此,在保險模式上,由生產者作為投保人具有可行性和合理性。對此,也有學者提出建立“雙軌制”保險制度:即由無人車生產者與所有人或者管理人(消費者)分別為無人車投保。與汽車自身部件如傳感器、攝像頭、雷達、控制器等設備相關的事項,由生產者投保;因未盡到嚴格的檢查、維修義務或未按法律規定使用汽車等原因造成的交通事故,由消費者也即汽車所有者投保。[46]157這也是未來立法可參考的一種路徑選擇。“雙軌制”保險既可分散生產者和消費者的法律責任,也可保證受害人獲得公平及時賠償。總之,責任強制保險制度對于解決無人車的交通事故侵權問題不可或缺。
整體而言,立法是應對無人車等人工智能挑戰的良藥。但反觀我國現行立法,民事立法的時代性特征尚未得到充分展現。在國家立法層面,《侵權責任法》《道路交通安全法》以及最新的《民法典侵權責任編》的制度設計尚未對人工智能/無人車等新事物引發的法律沖擊和挑戰作出回應。這無疑不利于有效解決無人車侵權責任的認定和承擔問題。事實上,在智能互聯網時代,率先為人工智能/無人車立法,既是防范智能產品安全風險的有力舉措,更能體現一國對無人駕駛領域國際話語權和標準制定權的重視和積極爭奪。為此,我國《民法典侵權責任編》的制度設計可以適當超前,即可對人工智能/無人車的相關問題作出立法回應,增設人工智能/無人車相關的侵權責任規范。詳言之,可在《侵權責任編》第二章“損害賠償”中增加無人車致害致損的總體規定,確立三元歸責原則體系,為無人車的交通侵權損害賠償提供總體思路。同時,可在第四章“產品責任”和第五章“機動車交通事故責任”中,增加有關人工智能高新技術產品責任和無人車交通致損侵權責任的具體規定。在遵循侵權法原理之基礎上,通過立法先行以明定無人車的基本定義、侵權擔責主體、歸責原則的適用、構成要件要素以及損害賠償的制度范本,既可為后續《道路交通安全法》《保險法》等法律的修改提供立法先例,更能為受害者權益救濟和無人車產業發展提供基本法保障。
作為人工智能的杰出代表,無人車剛一問世就廣受社會關注。與智能技術紅利相比,法律則更加關注其潛在的安全風險,因為法律的功能恰恰在于提早為哪怕是極小概率的不安全事件提供有效保障,既是為了警示生產者務必高度重視無人車質量,更在于能公正及時地救濟受害人,從而維續社會秩序的安定。而對于無人車可能引發的交通侵權損害,賦予無人車以獨立法律人格難以奏效,故其責任分配當以生產者承擔產品責任為中心,以使用者承擔交通事故責任為例外、公平責任原則為補充的三元歸責模式,輔之以建立責任強制保險為配套機制的路徑選擇,合力共克傳統侵權責任規則的適用困境。總之,面對無人車的風險與挑戰,我國侵權法調整要堅持鼓勵科技創新和保護受害人并重的原則,以維系相關各方當事人利益平衡為指南。而法律規則如何設計才能有效應對新挑戰,則是對我們學術能力和立法智慧的又一次檢驗,這或將是今后民法學界持續研討的話題。
參考文獻:
[1] Daniel J.Fagnant,Kara Kockelman.Preparing a Nation for Autonomous Vehicles:Opportunities,Barriers and Policy Recommendations,Transportation Research Part A:Policy and Practice[J].Elsevier,2015(77):167-181.
[2] 鄭志峰.自動駕駛汽車的交通事故侵權責任[J].法學,2018(5):16-29.
[3] Bryant Walker Smith. Managing Autonomous Transportation Demand[J]. Santa Clara L.Rev.,2012(52):1041-1049.
[4] Elvia Adriano Quintana Adriano Natural Persons,Juridical Persons and Legal Person-hood[J]. Mexican Law Review,2015(8):101-118.
[5] 馮鈺. 自動駕駛汽車致損的民事侵權責任[J].中國法學,2018(6):109-132.
[6] Luciano Floridi ,J .W.Sanders.On the Morality of Artificial Agents[J]. Minds& Machines,2004(14):349-379.
[7] 鄭戈.人工智能與法律的未來[J].探索與爭鳴,2017(10):78-84.
[8] 袁曾.人工智能有限法律人格審視[J].東方法學,2017(5):50-57.
[9] Kyle Field.Google Self-Driving Cars Now Considered Drivers by NHTSA[EB/OL].(2016-02-16) [2019-11-17].https://cleantechnica.com/.
[10] 郭少飛.“電子人”法律主體論[J].東方法學,2018(3):38-49.
[11] 孫占利. 智能機器人法律人格問題論析[J].東方法學,2018(3):10-17.
[12] Curtis E. A.Karnow. Liability for Distributed Artificial Intelligences[J].Berkely Technology Law Journal,1996(11):147-204.
[13] John Frank Weaver. Robots Are People Too:How Siri,Google Car,and Artificial Intelligence Will force Us to Change Our Laws[M]. New York:Praeger?Publishers,2013.
[14] Peter Millican. Andy Clark,Machines and Thought [M]. Oxford:Oxford University Press,2002.
[15] 張繼紅,肖劍蘭. 自動駕駛汽車侵權責任問題研究[J].上海大學學報(社會科學版),2019(1):17-31.
[16] 彭誠信.人工智能的法律主體地位[J].人民法治,2018(18):98-100.
[17] 房紹坤,林廣會.人工智能民事主體適格性之辨思[J].蘇州大學學報(哲學社會科學版),2018(5):64-72.
[18] 劉洪華.論人工智能的法律地位[J].政治與法律,2019(1):11-21.
[19] Jeffrey k. Gumey. Driving into the Unknown:Examining the Crossro ads of Criminal Law and? Autonomous Vehicles[J]. Wake Forest J.L.&Pol y. 2015(5):393-414.
[20] 吳漢東.人工智能時代的制度安排與法律規制[J]. 法律科學,2017(5):128-136.
[21] 司曉,曹建峰. 論人工智能的民事責任:以自動駕駛汽車與智能機器人為切入點[J]. 法律科學,2017(5):166-173.
[22] Carrie Shroll. Splitting the Bill:Creating a National Car Insurance Fund to Pay For Accidents in Autonomous Vehicles[J]. NW. U. L. Rev.,2015(109):803-815.
[23] 藤田由敬.自動運転と運行供用者の責任[J].ジュリスト,2017(1):23-29.
[24] Gary E. Marchant. The Coming Collision Between Autonomous Vehicles and the Liablity System[J]. Santa Clara L. Rev.,2012(52):1321-1340.
[25] Pagallo U. The Laws of Robots:Crimes,Contracts,and Torts[M].Dordrecht:Springer,2013.
[26] Sophia H. Duffy,Jamie Patrick Hopkins. Sit,Stay,Drive:The future of Autonomous Car Liability[J].SMU Science &Technology Law Review,2014(16):101-123.
[27] Caitlin Brock. Where Were going,We Dont Need Drivers:the Legal Issues and Liability Implication of Autonomous Vehicles Technology[J].UMKC Law Rev,2014(83):769-787.
[28] 葉金強.風險領域理論與侵權法二元歸責體系[J]. 法學研究,2009(2):38-56.
[29] 王澤鑒.侵權行為法[M].北京:北京大學出版社,2016.
[30] 馮潔語.人工智能技術與責任法的變遷——以自動駕駛技術為考察[J]. 比較法研究,2018(2):143-155.
[31] 沈玲. 美歐無人駕駛汽車相關立法的最新進展及對我國的啟示建議[J]現代電信科技,2017( 3 ):13-17.
[32] 袁曾.無人駕駛汽車侵權責任的鏈式分配機制——以算法應用為切入點[J].東方法學,2019(5):28-39.
[33] 馮·巴爾.歐洲比較侵權行為法(下卷)[M].焦美華,譯.北京:法律出版社,2001.
[34] 殷秋實. 智能汽車的侵權法問題與應對[J]. 法律科學,2018(5):42-50.
[35] 王利明. 民法總則[M].北京:中國人民大學出版社,2017.
[36] 王利明. 侵權行為法歸責原則研究[M].北京:中國政法大學出版社,2003.
[37] 程嘯.機動車損害賠償責任主體研究[J]. 法學研究,2006(4):127-140.
[38] 楊立新. 道路交通事故責任研究[M].北京:法律出版社,2009.
[39] 梁慧星.“行人違章撞了白撞”是違法的[N].人民法院報,2001-02-23(3) .
[40] 馬軍杰,李秋悅. 城市道路交通事故責任承擔博弈論思考[J]. 時代法學,2018(5):95-101.
[41] 程嘯.侵權責任法[M].北京:法律出版社,2015.
[42] 張力,李倩.高度自動駕駛汽車交通侵權責任構造分析[J]. 浙江社會科學,2018(8):35-43.
[43] Jim Gorzelany. Volvo Will Accept Liability for Its Self-Driving Cars[EB/OL].(2015-10-09) [2019-03-23].http://www.forbes .com/sites/jimgorzelany/2015/10/09/volvo-will-accept-liability-for-its-self-driving-cars/#7b6a779d3d80.
[44] Automated and Electric Vehicles Act 2018(Provision 2-Provision 5)[EB/OL].(2018-08-18) [2019-11-08]. http://www.legislation.gov.uk/ukpga/2018/18/.
[45] Frank Henke,Christoph Ritzer,Clemens Rübel,Tiffany Zilliox,Eva-Maria Barbosa. Christina Lorenz.Autonomous vehicles:The legal landscape of DSRC in Germany[EB/OL].(2017-07-07) [2019-11-08].http//www.nortonrosefulbright.com/knowledge/publications/154716/autonomous-vehicles-the-legal-landscape-of-dsrc-in-germany/2017-7/.
[46] 侯郭壘. 自動駕駛汽車風險的立法規制研究[J].法學論壇,2018(5):153-160.
責任編輯:汪效駟
