節能型鄉鎮供水系統的應用研究
2020-04-07 02:42:48楊磊沈璐
綏化學院學報 2020年3期
楊 磊 沈 璐
(1.安徽機電職業技術學院機械工程學院;2.蕪湖職業技術學院 安徽蕪湖 241002)
節能型鄉鎮供水系統的應用研究目標是研究一種供水系統的實施方案,以鄉鎮用戶對水的需求為前提,通過對管網用水流量以及供水壓力的計算,合理控制水泵的取水量。實現用多少水供多少水。通過對供水管網中的用水量以及最不利點水壓的計算,結合智能控制技術,通過傳感器對供水系統以及變頻泵進行系統優化控制。使得管網的水壓隨流量的變化而改變。讓管網的各級設備在節能、高效的工況下運行。從而節約了揚程,降低了能耗。實現真正意義上的變壓變量供水方式。這種方式降低了供水成本,滿足不同用戶的需要。
一、變壓變量供水系統基本原理
(一)節能介紹。變壓變量供水的特點是管網出水口的壓力隨著供水量的改變而改變。在管網供水量較少時,管網輸出的水壓也較低。在管網供水量較大時,管網輸出的水壓也升高,從而減少了用電量。在實際供水系統中的一個重要標準是:確保供水系統中最不利供水點的供水壓力,并且同時滿足所有用戶同時用水的需求。如最不利供水點水壓過低,會減少供水的可靠性。如水壓過高,從而出現了揚程的浪費[1]。變頻供水運行工況如圖2-1 所示:A0為水泵特性曲線,H0為管網的特性曲線。Q2為流量,H2為揚程,n0為轉速。B 為恒壓供水工況下的水泵的工況點。通過對恒壓供水的系統進行分析,在管網的揚程保持恒定的時候,管網流量從Q2轉為Q1,電機轉速從n0滑到n1,從而b為水泵新的工況點。揚程Δh1是系統節省的部分,但此時Δh2被忽略了,因此恒壓供水系統浪費了一定揚程。下圖的這種供水方式采取變壓變量的方法,以管阻特性曲線為依托,把管阻特性和水泵揚程結合起來,當管網的流量下降至Q1時,水泵電機的轉速也降至n2,此時C點為工況點。通過分析,變壓變量的供水方式節省了揚程Δh2,從而進一步節約了能耗,可見變壓變量的供水方式更加節能[2]。
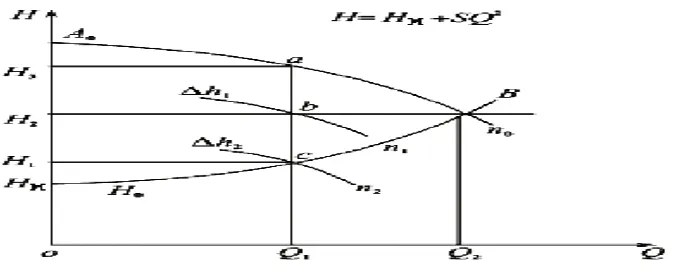
圖1 水泵節能原理圖
假設最不利用水點的壓力值為Hm,管網損失為Hf,管網初始壓力為H0,見下列關系式:

以上是管網水損的公式。S0稱為比阻,為單位流量的液體通過單位長度管道時所需水頭。由于供水管網的主干道通常是恒定的,所以L為一個常量。則S=S0L,得出:

不如有些控制方法,但結構較為簡單且更容易實現。而建造成本和恒壓供水相當。節能效果遠優于恒壓供水。
由此可見恒壓變量供水方式它是始終保持恒定的水壓,雖然最不利用水點的水壓得以保證,但卻浪費了揚程,產生不必要的能源浪費。在恒壓變量供水的基礎上進行優化便產生了變壓變量供水方式,節約了能源。
(二)系統結構。通過記錄不同時段時管網的流量,以滿足用戶需求為前提條件,設定相對應的管路初始壓力,并且將初始壓力值存于存儲器內。系統運行時,管網的水壓會隨流量的變化而變化。不同流量下所需的水壓,控制器依據用水量的變化情況,控制水泵的轉速和運行臺數來調節供水管網的出口水壓。在確保系統穩定性的前提下,盡可能的降低能耗。如圖2所示:
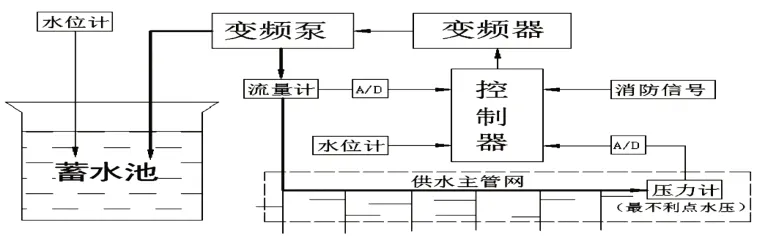
圖2 系統原理圖
(三)控制策略。利用流量Q確定水泵揚程的方法。在供水管網中通過流量計將不同時間段檢測到的管網流量Q反饋給PLC,再根據 確定水泵機組的總揚程H,通過變頻調速使供水管網的流量和總揚程達到最佳工況點的要求。理論上對于單條的鄉鎮管網供水系統,可以得到相應的管阻特性曲線。根據管網的運行狀況,近似估算出的管阻特性曲線。并通過模糊控算法由PLC完成控制的一系列控制過程。在實際運行中,因為管阻特征曲線不易確定,需要運行數據多年的積累。這里本文提出可根據鄉鎮供水管網的特點,采用取近似變壓曲線控制的方法。可以把這種方法理解成為分時變量狀態下的恒壓供水系統。這種控制方法的精度雖不如有些控制方法,但結構較為簡單且更容易實現。而建造成本和恒壓供水相當。節能效果遠優于恒壓供水。
(四)工作原理。該系統采用3 臺水泵對管網供水,分為1 臺變頻、1 臺工頻1 臺變頻、2 臺工頻1 臺變頻三種工作狀態。供水系統利用安裝在管網出口處的流量傳感器,每隔30 分鐘采集一次管網的流量數據。由于管網的水壓和流量存在線性關系,可以計算出不同流量所對應的水壓。把這些數據存入PLC進行參數的預設。供水系統把實際運行時采集到的管網出口水壓與設定好的壓力進行比較,計算壓差變化率和壓力差。把壓差變化率和壓力差傳到模糊控制器進行模糊計算,得到輸出頻率。實現控制水泵轉速來完成變壓變量供水的整個過程。因為每30 分鐘采集一次流量,所以每30 分鐘完成一次分時變壓的動作。如圖3所示:
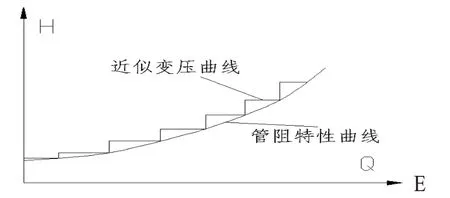
圖3 近似變壓曲線圖
例如對某鄉鎮管網改造前進行實測得到寶貴數據,已知在保證最不利點水壓為0.3Mpa的前提下,記錄供水管網不同時間段下的流量和初始水壓。通過PLC和變頻器對3臺水泵運行狀態進行控制,使得管網在的不同流量下達到設定的參考水壓值。如表1所示:
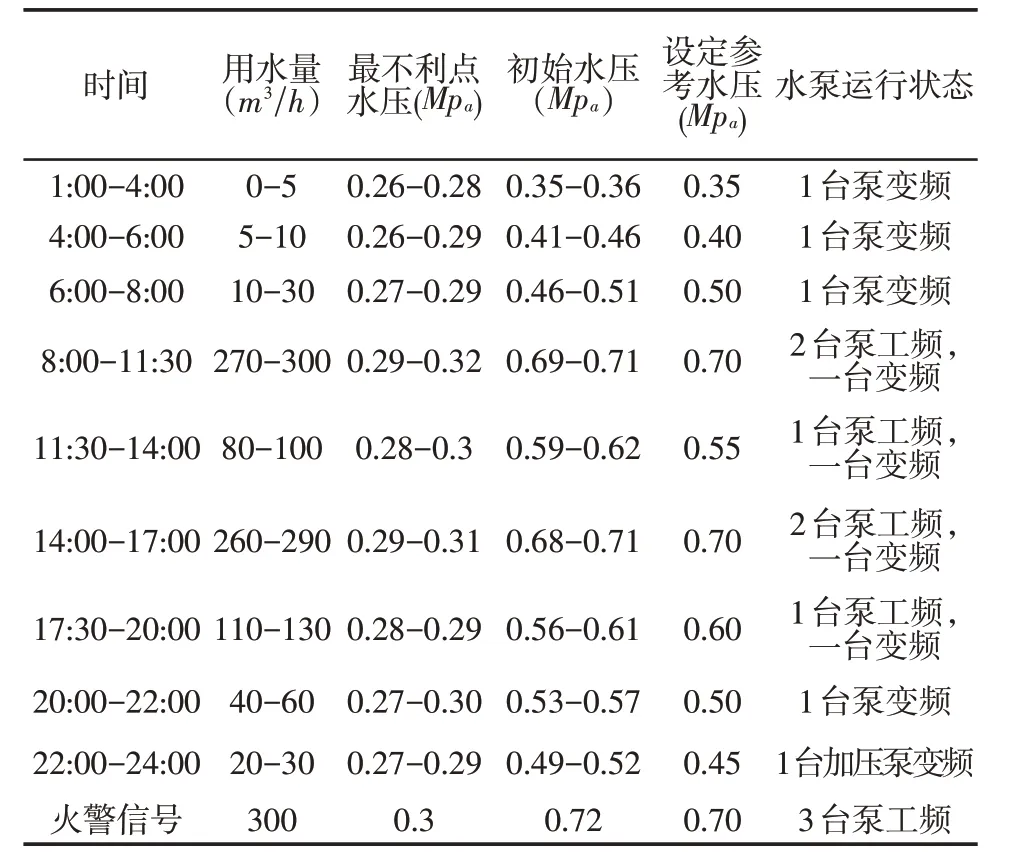
表2-1 管網參考水壓值
(五)功能設計。
1.利用模糊控制原理,對供水系統采用變壓變量的控制方式。并對每一臺水泵電機進行軟啟動。
2.工頻和變頻實現自動切換。
3.采用先啟先停的原則,自動切換到下一臺泵,以防止泵長時間不用而銹死。
4.蓄水池缺水自動報警,停止工作。
5.接受到火警信號時,所有電機切換到工頻,滿負荷運行。
6.供水壓力要求恒定,波動一定要小,尤其在換泵時。
7.為了檢修和應急要設有手動功能。
二、變壓變量模糊控制方法
模糊集合、模糊語言變量、模糊邏輯構成了模糊控制方法的知識結構。通過對人的思維方法的模擬,使其可以控制那些無法建立精確數學模型的對象和過程。模糊控制理論的實質是利用計算機來實現并具有模糊性的控制規則。控制過程分為模糊化、知識庫、模糊推理和去模糊化4個步驟,也是一般模糊控制器的4 個組成部分。這些規則通過模糊控制器進行計算并利用計算機實現,最終完成由計算機代替人腦對對象進行自動控制的過程,這是模糊控制的基本原理[3]。
(一)系統原理。在確保最不利用水點的壓力滿足用戶要求的前提下,管網用水量變化的同時,供水的壓力也隨之發生變化[4]。利用模糊控制的方法對供水系統進行變壓變量控制的原理是:在信號采樣時,把每次檢測到的出口水壓和當前流量下的預設的水壓值進行比較。再把壓力的差值輸入模糊控制器,并通過模糊控制器算出壓力誤差變化量,通過模糊控制規則解模糊得出一個控制常量。把控制量的數值傳輸到變頻器,從而對水泵電機的轉速進行控制。在供水量變化較大時,可以利用 PLC來實現水泵變頻和工頻泵的轉換,使管網的供水壓隨管網用水量的變化而變化[5]。
(二)模糊控制器的系統結構。在設計模糊控制器的時候,不用創建精確數學的模型,從而容易理解、接受模糊控制原理,把供水系統作為研究對象,由于供水管網很長,水壓調節具有滯后性且流量變化較緩慢,管網的水壓控制就是一個非線性、大慣量、動態的一個控制對象,適用于模糊控制理論的范圍。供水管網模糊控制系統的基本結構如圖4[6]所示:
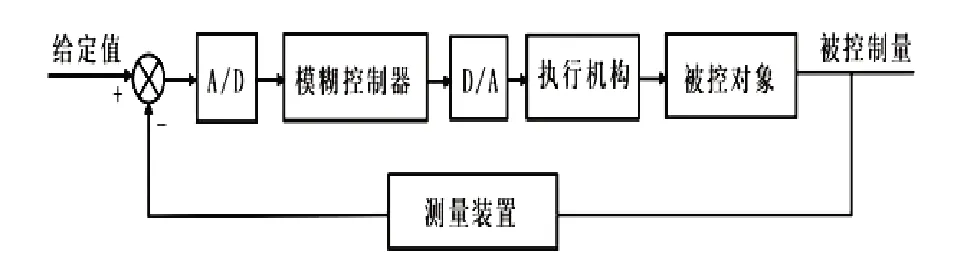
圖4 模糊控制系統原理圖
(三)模糊控制系統的設計步驟。
1.定義輸入、輸出變量。由科學推導出的量和被控系統的觀測量作為模糊控制系統的輸入變量。由操控執行單元的操作量作為模糊控制系統的輸出變量。設計模糊控制系統時的輸出入量是,要通過科學推導,設計出正確的輸出入量。
2.制定模糊控制策略。輸入的觀測量可以是數值,也可以是別形式的輸入量。設計模糊控制系統時要通過輸入量的不同形式,制定適當的模糊控制策略,便于轉換成語言變量。
3.語言變量數據庫的定義。
4.控制系統規則庫的設計。
5.模糊推理的結構的設計。
6.解模糊,把模糊變量轉換為可控量。
具體方法如下:
通過對系統控制策略的分析,確定系統的基本結構。以模糊控制器為核心,結合適應性環節,構成控制穩定、適應性好以及結構簡單的控制系統。系統結構如圖5所示:
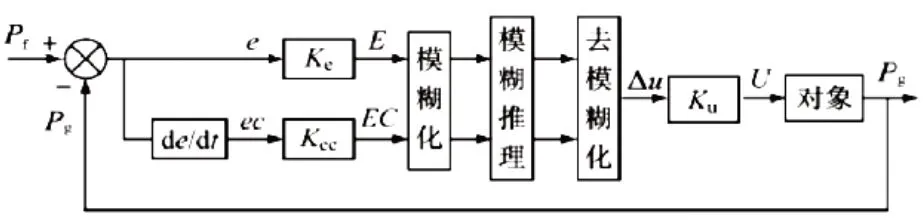
圖5 模糊控制系統結構圖
圖中pg為水壓的設定值,pf為水壓的實際測量值。它們的偏差為ec(e=Pf-Pg)以及偏差變化率為ec(ec=de/dt)。轉化為量化因子,經過模糊化計算出模糊量E 和EC。輸入到模糊控制器,經過模糊化、模糊推理和去模糊化這些步驟,取得輸出量Δu。Δu和例因子Ku的乘積計算出輸出頻率 U給變頻電機,從而完成一整套的模糊控制過程。
(1)輸入量及其模糊化處理。考慮鄉鎮供水特殊性,設定管網最高水壓值為0.7MPa,設定最低水壓0.4MPa,從而偏差e 和偏差變化率ec 的基本論域就為(-0.3,0.3)MPa。量化因子取10,所以偏差和偏差變化率ec 的模糊論域為(-3,3)。因電網頻率為50Hz,從而輸出△u 的基本論域為(0,50)Hz,故比例因子取8,則輸出△u的模糊論域為(0,6)。同理△u輸出分為正大(PB)正中(PM)、正小(PS)、零(ZR)、負小(NS)、負中(NM)、負大(NB)7個模糊子集。
把壓力偏差E建立為7個模糊子集:分別正大(PB)、正中(PM)、ZO 正小(PS)、零(ZR)、負小(NS)、負中(NM)、負大(NB)。隸屬度函數如圖6所示:
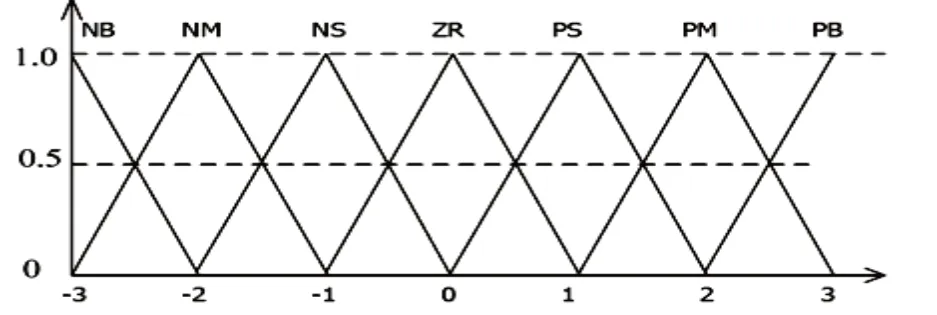
圖6 壓力偏差隸屬度圖
把壓力偏差變化率EC 建立為7 個模糊子集,論域選擇為(-3,3)。
分別正大(PB)、正中(PM)、ZO 正小(PS)、零(ZR)、負小(NS)、負中(NM)、負大(NB)。設計隸屬度函數如圖7所示:
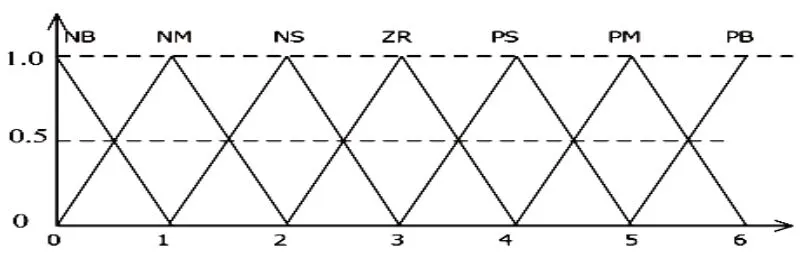
圖7 偏差變化率隸屬度圖
(2)輸出量及其模糊化處理。把Δu 建立為7 個模糊子集:分別正大(PB)、正中(PM)、ZO 正小(PS)、零(ZR)、負小(NS)、負中(NM)、負大(NB)。設計隸屬度函數如圖8所示:
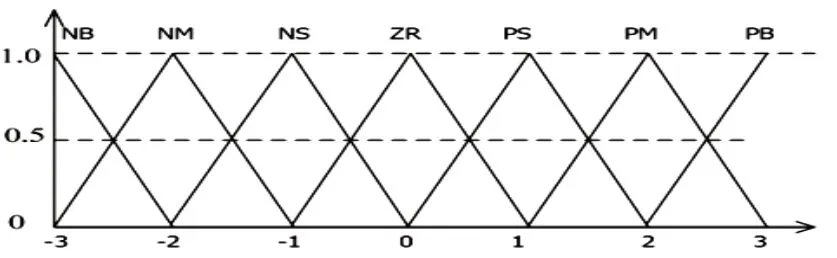
圖8 輸出頻率的隸屬度圖
制定系統模糊控制規則如表2所示:
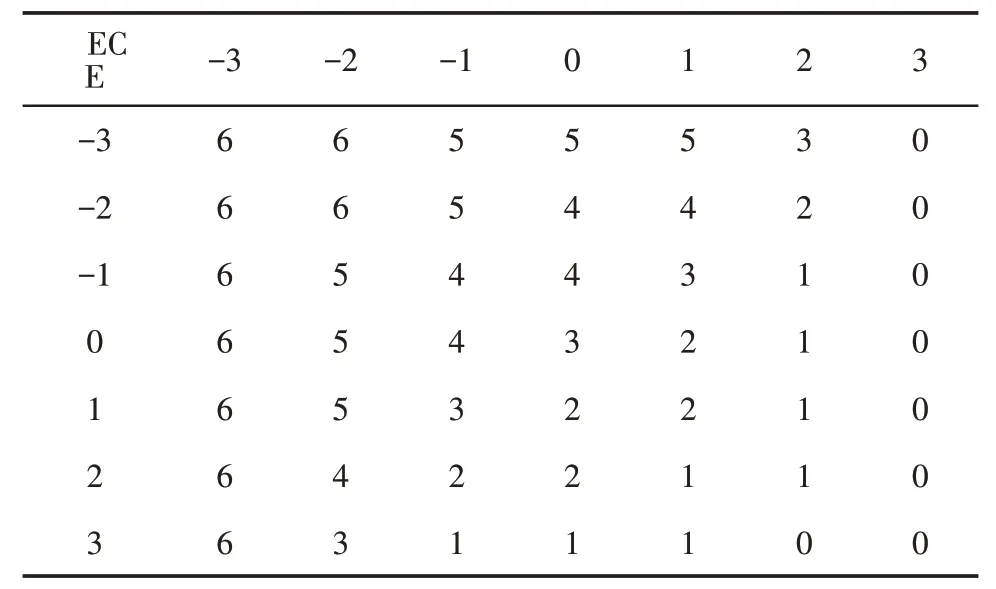
表2 模糊控制規則表
生成49條If-then語句:
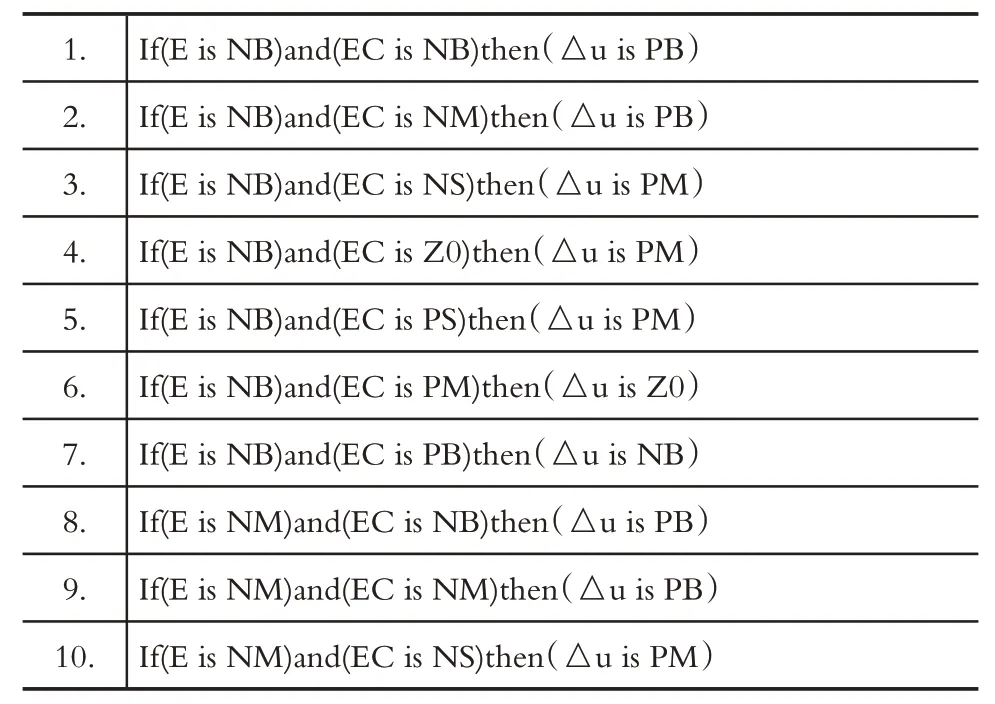
If(E is NB)and(EC is NB)then(△u is PB)If(E is NB)and(EC is NM)then(△u is PB)If(E is NB)and(EC is NS)then(△u is PM)If(E is NB)and(EC is Z0)then(△u is PM)If(E is NB)and(EC is PS)then(△u is PM)If(E is NB)and(EC is PM)then(△u is Z0)If(E is NB)and(EC is PB)then(△u is NB)If(E is NM)and(EC is NB)then(△u is PB)If(E is NM)and(EC is NM)then(△u is PB)If(E is NM)and(EC is NS)then(△u is PM)1.2.3.4.5.6.7.8.9.10.
(3)模糊控制查詢表建立和解模糊。模糊子集的交叉節點處壓力偏差變化率EC和壓力偏差E的值會產生多種輸出結果,解模糊的方法是利用重心法公式運算出輸出結果,重心法如式(5)所示[7]:

因為偏差的變化率和壓力偏差各有7個子集,所以輸出共有49個結果,通過運算壓力偏差變化率EC和壓力偏差E的結果生成模糊控制規則表,并儲存在PLC中,經過計算和查詢可得到相應的輸入。如表3所示:

表3 模糊控制規則表
案例:
當E=-0.5時對應的兩個模糊子集:零(Z0)和負小(NS);其隸屬度為:
μ零(-0.5)=1/2;μ負小(-0.5)=1/2
當EC=-1.5 時對應的兩個模糊子集:負小(NS)和負中(NM);它的隸屬度為:μ負中(-1.5)=1/2;μ負小(-1.5)=1/2
所以,激活的規則有4條:
E=(NS)且 EC=(NS)則 Δu=(PS) E=(Z0)且 EC=(NS)Δu=(PS)
E=(NS)且 EC=(NM)則 Δu=(PM) E=(Z0)且 EC=(NM)Δu=(PS)
對4 條隸屬度規則取其兩個前提條件中的隸屬度中最小的:
依據三角形從屬函數,模糊子集“正中”和“正小”對應的值為5Hz和4Hz,代入重心法公式計算得出式(6):

由于比例因子為8,因此輸出頻率為32Hz。
三、結語
本文結合鄉鎮供水的實際情況和當今科學技術的成果,針對鄉鎮用戶對供水系統的需求,設計出一套智能化程度高、節能高效、低維護成本、操作方便、安全可靠的變壓變量供水系統。其基本工作原理是:通過對供水管網中的用水量以及最不利用點水壓的計算,合理控制取水的深水泵的取水量,使得管網的水壓隨流量的變化而改變,實現用多少水供多少水。通過智能控制技術對供水系統以及變頻泵進行系統優化控制、管理與監控,使管網的各級設備在節能、高效的工況下運行。從而節約揚程,降低能耗。使系統在安全、可靠、節能的工況下運行。