基于模塊化研發(fā)的智能環(huán)境監(jiān)測平臺
2020-04-09 04:33:59劉文鹍
物聯(lián)網(wǎng)技術(shù) 2020年3期
關(guān)鍵詞:模塊化
劉文鹍
摘 要:目前我國環(huán)境監(jiān)測企業(yè)多以中小型企業(yè)為主,相比于大型企業(yè),中小型企業(yè)技術(shù)儲備不足、研發(fā)力量薄弱等問題突出。同時在行業(yè)整體技術(shù)升級階段,中小型企業(yè)還將面臨開發(fā)新產(chǎn)品而導(dǎo)致研發(fā)成本上升等問題出現(xiàn)。針對以上問題,文中闡述了基于模塊化開發(fā)的智能監(jiān)測平臺,首先將完整的產(chǎn)品研發(fā)分解為多個模塊化功能組件,之后通過模塊不同的組合實現(xiàn)產(chǎn)品功能。在保證產(chǎn)品功能的前提下,盡可能降低成本,提高研發(fā)效率,充分滿足產(chǎn)品的可定制化與可重構(gòu)性,以減輕中小型企業(yè)的研發(fā)支出及產(chǎn)品交付壓力。
關(guān)鍵詞:模塊化;平臺化;環(huán)境監(jiān)測;研發(fā)平臺;x86工控機;中小型企業(yè)
中圖分類號:TP273;X831 文獻(xiàn)標(biāo)識碼:A 文章編號:2095-1302(2020)03-00-04
0 引 言
隨著工業(yè)技術(shù)的迅猛發(fā)展,新技術(shù)不斷涌現(xiàn),各類工業(yè)產(chǎn)品的升級換代遠(yuǎn)遠(yuǎn)快于以往。面對市場和客戶新的需要以及不斷上漲的成本壓力,環(huán)境監(jiān)測行業(yè)中傳統(tǒng)的產(chǎn)品研發(fā)思路及產(chǎn)品維護方法已無法滿足當(dāng)下的需求。很多企業(yè)需要具有可以靈活升級,并可以給客戶提供定制化方案的產(chǎn)品研發(fā)平臺。同時,該研發(fā)平臺還需要兼具研發(fā)周期短和生產(chǎn)成本低等優(yōu)勢,而模塊化的產(chǎn)品設(shè)計便很好地解決了這個問題。
1 智能檢測平臺的模塊化設(shè)計思路
模塊化的理念最早由大眾公司提出,并應(yīng)用于汽車工業(yè)[1]。模塊化設(shè)計可以把某一款產(chǎn)品分解成一系列功能模塊,再采用類似搭積木的手法,通過模塊間不同的選擇和組合構(gòu)成不同產(chǎn)品以滿足市場和客戶需求。
在模塊化設(shè)計思路下,可以將完整的產(chǎn)品視為由一個核心功能模塊與多個子功能模塊構(gòu)成。各功能模塊只需滿足各自固定的產(chǎn)品標(biāo)準(zhǔn)和對外接口即可(功能模塊可以對外采購或使用上一代產(chǎn)品的功能模塊),無需對每個模塊進(jìn)行重新研發(fā)和生產(chǎn)。從根本上改變了產(chǎn)品的設(shè)計模式,使得研發(fā)部門能夠更加輕松地完成研發(fā)和調(diào)試工作,將產(chǎn)品的功能和技術(shù)都提升至同期較高水平[2]。產(chǎn)品在現(xiàn)場遇到問題時只需更換存在故障的模塊,無需對整個設(shè)備進(jìn)行替換,對于產(chǎn)品的維修亦如此。當(dāng)對該研發(fā)平臺的核心模塊、核心技術(shù)以及工藝技術(shù)進(jìn)行升級和替換時,又可以產(chǎn)生新一代研發(fā)平臺[3]。在這種思路下,無論是產(chǎn)品的定制化升級還是換代升級,都不需要對整個產(chǎn)品進(jìn)行重新研發(fā),只需針對某一部分模塊和技術(shù)進(jìn)行升級和換代即可。
本文闡述的智能監(jiān)測平臺依靠上述模塊化設(shè)計理念,通過多種獨立的功能模塊,在統(tǒng)一的接口和架構(gòu)下進(jìn)行有機整合,有效解決了產(chǎn)品研發(fā)中面臨的成本上升及研發(fā)周期過長等問題。
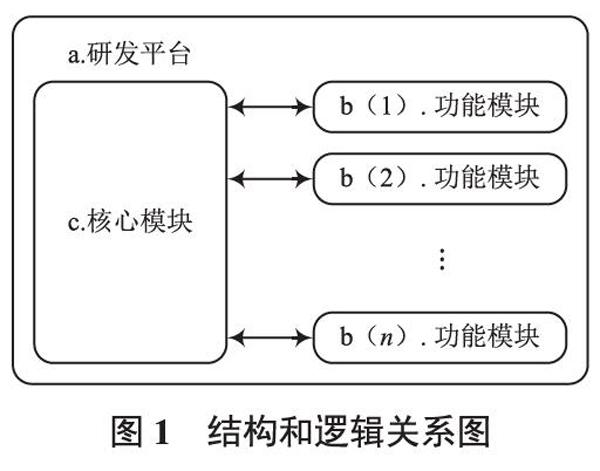
為了理清相關(guān)結(jié)構(gòu)和內(nèi)在邏輯關(guān)系,本文定義了以下概念,相關(guān)結(jié)構(gòu)和邏輯關(guān)系如圖1所示。
(1)研發(fā)平臺:指由一個核心模塊外加多個子功能模塊組合而成的整體,其中既包含硬件也包含軟件。研發(fā)平臺具有完整的功能與一定的可拓展性,可通過對其中子功能模塊的調(diào)整來衍生出可滿足不同需求的產(chǎn)品。
(2)功能模塊:是從研發(fā)平臺中分解出的一個功能部件,本身也是一個具有獨立功能的產(chǎn)品。功能模塊具有通用性,可匹配研發(fā)平臺的軟件或是硬件接口,可自主研發(fā)或?qū)ν獠少彙?/p>
(3)核心模塊:一個研發(fā)平臺中只有一個核心模塊(個別情況也可能有雙核心或多核心),其中包含企業(yè)的核心技術(shù)與核心競爭力。與普通模塊不同,核心模塊一般不輕易改動。核心模塊的更換意味著研發(fā)平臺的升級和換代,但新核心模塊應(yīng)保留一定的向下兼容性,即部分現(xiàn)有的功能模塊仍能夠被新的核心模塊兼容。
模塊化設(shè)計思路具有如下優(yōu)點:
(1)降低整套產(chǎn)品的復(fù)雜性,提高通用性;
(2)各功能模塊之間相對獨立,不干擾相互之間的采購或研發(fā)進(jìn)度;
(3)大大縮短研發(fā)周期并降低研發(fā)成本;
(4)產(chǎn)品的結(jié)構(gòu)和功能清晰,便于現(xiàn)場維護和升級;
(5)降低研發(fā)新產(chǎn)品的風(fēng)險。
2 研發(fā)平臺設(shè)計
2.1 研發(fā)平臺結(jié)構(gòu)及工作原理
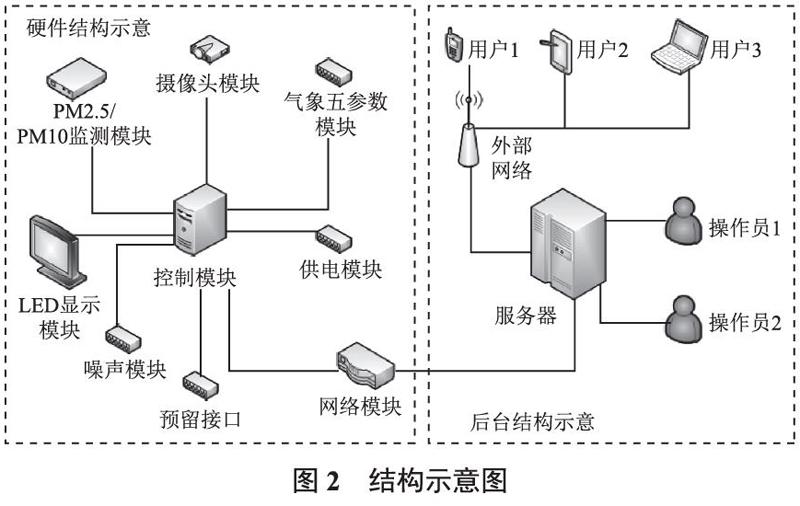
智能環(huán)境監(jiān)測的研發(fā)平臺主要包含主控模塊、供電模塊、PM2.5/PM10監(jiān)測模塊、LED顯示模塊、氣象五參數(shù)模塊、噪聲模塊、攝像頭模塊和網(wǎng)絡(luò)模塊等。其中主控模塊用于控制其他模塊,并對采集的數(shù)據(jù)做本地處理。PM2.5/PM10監(jiān)測模塊負(fù)責(zé)監(jiān)測空氣中的顆粒物,適用于大氣污染及工地?fù)P塵等監(jiān)測場景,可根據(jù)不同的需求配置PM2.5或PM10監(jiān)測設(shè)備。攝像頭模塊為監(jiān)測系統(tǒng)提供圖像信息,并在污染報警時抓拍現(xiàn)場畫面用于執(zhí)法取證。所有的監(jiān)測數(shù)據(jù)最終都通過網(wǎng)絡(luò)模塊傳送到后臺服務(wù)器,通過后臺服務(wù)器向相關(guān)部門發(fā)送污染報警信息。擁有權(quán)限的操作員既可以查看后臺數(shù)據(jù),也可以通過服務(wù)器后臺調(diào)整數(shù)據(jù)上傳間隔和攝像頭角度等。外部用戶可隨時通過手機、平板電腦或筆記本電腦查看最新的現(xiàn)場情況。除此之外,研發(fā)平臺還要預(yù)留一些硬件接口,以便后期增加新功能。所有的硬件模塊都可以通過自由組合以適應(yīng)不同行業(yè)的需求,軟件和后臺也可以通過功能的增減和不同權(quán)限的設(shè)置來為客戶提供定制化服務(wù)。結(jié)構(gòu)示意如圖2所示。
2.2 硬件設(shè)計
2.2.1 主控模塊
主控模塊是研發(fā)平臺的核心,它既要承擔(dān)控制其他模塊的任務(wù)(發(fā)送相關(guān)操作指令),還必須存儲和處理本地數(shù)據(jù)。工業(yè)控制中常用的幾種控制模塊是PLC、單片機、ARM架構(gòu)的工控機和x86架構(gòu)的工控機。PLC簡單易用、可靠性高,但價格較高,且數(shù)據(jù)處理能力弱,不適合應(yīng)用在該智能監(jiān)測領(lǐng)域。16位和32位單片機的優(yōu)點是可靠性高、價格便宜,但處理能力較弱、代碼的開發(fā)周期長并對開發(fā)人員有較高的要求。ARM架構(gòu)屬于功能較強的單片機,一般工業(yè)產(chǎn)品中Cortex-A8架構(gòu)和Cortex-A9架構(gòu)較為常見。這類工控機處理能力比普通單片機強,并且易于拓展,但是只能夠運行Linux或Android系統(tǒng)。相較之下,雖然x86架構(gòu)的工控機價格最高,但通用性好,既可以運行Windows系統(tǒng),也可以運行Linux系統(tǒng),且數(shù)據(jù)處理能力強、工業(yè)接口豐富,易于后期研發(fā)新功能,主控模塊無需頻繁升級。
本文選用研華公司設(shè)計生產(chǎn)的ARK-1124C超緊湊型工控機。該工控機外形小巧、尺寸合適,采用Intel Celeron N3350雙核處理器(x86架構(gòu))、內(nèi)存最大支持8 GB、4個工業(yè)串口(可設(shè)置RS 232或是RS 485)、USB接口和以太網(wǎng)接口,可以根據(jù)項目需求選擇Windows或Linux系統(tǒng),完全可以滿足監(jiān)測領(lǐng)域的需求。此外,ARK-1124C采用無風(fēng)扇設(shè)計,自帶看門狗計時器,可靠性和穩(wěn)定性均有保障。
2.2.2 供電模塊
供電模塊選用開關(guān)電源供電。開關(guān)電源具有高效率、高可靠性、體積小以及防浪涌和防雷電等特性[4],能將外部的220 V交流電壓(AC)轉(zhuǎn)化為5 V,12 V,24 V等適合電子設(shè)備工作的直流電壓(DC)。在不同的項目中,開關(guān)電源型號的選擇需根據(jù)項目中所有模塊的功率之和,及各自的工作電壓作為參考。
2.2.3 PM2.5/PM10監(jiān)測模塊
Thermo Scientific(賽默飛世爾)的ADR-1500揚塵監(jiān)測儀采用光濁度技術(shù),具有精度高、響應(yīng)速度快、靈敏度高等優(yōu)勢。同時還配置了加熱器,可以有效抑制濕度增加后帶來的誤差,進(jìn)一步提升設(shè)備在不同環(huán)境下的通用性,同時也節(jié)約了這一部分自主研發(fā)的成本,適用于多種復(fù)雜揚塵場景的監(jiān)測。ADR-1500根據(jù)不同的項目可選擇USB,RS 232或無線傳輸?shù)韧ㄐ欧绞脚c主控模塊連接,通過不同的設(shè)置分別測量PM10或PM2.5數(shù)據(jù)。
對于有些需要大規(guī)模布點,但對精度要求又不高的項目而言,可以考慮更換較為便宜的揚塵監(jiān)測儀,以降低成本,提高產(chǎn)品競爭力。
2.2.4 LED顯示模塊
LED顯示模塊采用LED電子屏,用于顯示實時現(xiàn)場數(shù)據(jù)。對于固定位置安裝的監(jiān)測點,選擇尺寸較大的LED電子屏,以同時顯示所有現(xiàn)場環(huán)境數(shù)據(jù)。對于需要移動監(jiān)測的點,則選用小尺寸LED電子屏,便于安裝,數(shù)據(jù)信息采用屏幕滾動的方式顯示。
2.2.5 氣象五參數(shù)模塊
氣象五參數(shù)常見于環(huán)保領(lǐng)域的數(shù)據(jù)監(jiān)測。氣象五參數(shù)分別為溫度、濕度、大氣壓、風(fēng)速和風(fēng)向。其中溫度和濕度監(jiān)測可以集成在一個傳感器中;風(fēng)速和風(fēng)向傳感器直接安裝在戶外;溫濕度傳感器和大氣壓傳感器需放置在百葉箱內(nèi)。氣象五參數(shù)模塊選用RS 485接口,數(shù)據(jù)采集協(xié)議使用Modbus協(xié)議。所有的氣象五參數(shù)設(shè)備可共用一個接口與主控模塊相連接,高效、簡潔且節(jié)約成本。
2.2.6 噪聲模塊
噪聲模塊可以實時監(jiān)測現(xiàn)場的噪聲污染,并及時向主控模塊發(fā)送信息,為城管和環(huán)保部門的執(zhí)法提供依據(jù)。本文采用萬勝通的WST60M型工程噪音計模塊,通過RS 232串口連接主控模塊。
2.2.7 網(wǎng)絡(luò)模塊
網(wǎng)絡(luò)模塊選用力必拓公司設(shè)計研發(fā)的T260S工業(yè)級無線路由器。T260S結(jié)構(gòu)小巧便于安裝,支持目前主流的3G/4G網(wǎng)絡(luò),可用于不同的運營商網(wǎng)絡(luò)。對于某些無線網(wǎng)絡(luò)無法覆蓋的區(qū)域,可以使用網(wǎng)絡(luò)模塊自帶的10/100M以太網(wǎng)口連接外網(wǎng)。但對于現(xiàn)場網(wǎng)線架設(shè)超過50 m的情況則需要增加POE供電模塊。此外,T260S還有WiFi無線接口,可以在現(xiàn)場組建無線局域網(wǎng),既方便現(xiàn)場的調(diào)試工作,又能拓展其他帶有WiFi功能的模塊。
2.2.8 攝像頭模塊
攝像頭選用海康威視設(shè)計生產(chǎn)的DS-2DE5230W和DS-2DE4220IW-D/GLT系列攝像頭。DS-2DE5230W安裝方便,無需繁瑣的綜合布線。攝像頭既可以直接通過以太網(wǎng)口連接到工控機,也可以接在路由器的局域網(wǎng)中。該設(shè)備內(nèi)置云臺,操作人員通過相關(guān)指令可以控制攝像頭轉(zhuǎn)動來選擇合適的監(jiān)控角度。在需要多個攝像頭的現(xiàn)場,對于離主機較遠(yuǎn)且無法連接網(wǎng)線的地方,采用選裝4G模塊的DS-2DE4220IW-D/GLT系列攝像頭,監(jiān)控數(shù)據(jù)直接通過4G網(wǎng)絡(luò)向后臺服務(wù)器傳輸。
2.2.9 拓展功能
ARK-1124C型工控機硬件接口豐富,后期可以根據(jù)客戶的需求增加設(shè)備開箱報警和GPS定位等功能,也可以通過連接電磁閥或繼電器來控制更多現(xiàn)場設(shè)備。T260S工業(yè)級無線路由器自帶的WiFi可以在信號覆蓋區(qū)域內(nèi)組建無線局域網(wǎng)絡(luò)[5]。建筑工地里的一些大型設(shè)備如洗輪機和霧炮機均無遙控功能,只能手動控制,因此通過對這些設(shè)備加裝工業(yè)級WiFi電磁閥,便能將這些設(shè)備歸入自建無線局域網(wǎng)中,然后遠(yuǎn)程控制洗輪機和霧炮機的開關(guān)。
2.2.10 低成本方案
某些企業(yè)已有將單片機作為核心模塊的研發(fā)平臺,但核心模塊數(shù)據(jù)處理能力弱,無法處理圖像信息和本地數(shù)據(jù)。這些平臺通過增加DS-2DE4220IW-D/GLT系列攝像頭作為附加模塊,使用4G網(wǎng)絡(luò)與后臺服務(wù)器相連,將現(xiàn)場的圖像抓拍和攝像頭角度調(diào)整都交由后臺服務(wù)器控制,并將現(xiàn)場數(shù)據(jù)上傳至后臺服務(wù)器。由基于單片機的監(jiān)測模塊和4G攝像頭模塊組成的研發(fā)平臺雖然功能有限,但成本低,適合密集布點的監(jiān)測場景。
2.3 軟件設(shè)計
2.3.1 系統(tǒng)的選擇
研華ARK-1124C超緊湊型工控機采用x86架構(gòu),既可以運行Linux系統(tǒng)也可以運行Windows系統(tǒng)。本文選用Windows Embedded Standard 7(WES7)—微軟針對工業(yè)控制領(lǐng)域推出的專用版本。相比Linux系統(tǒng),Windows系統(tǒng)的研發(fā)門檻低,無論出廠前調(diào)試或現(xiàn)場維護都更加方便。雖然使用Windows系統(tǒng)需要向微軟支付一定的費用,但在后期的開發(fā)中也可以獲得微軟的技術(shù)支持[6]。此舉雖然增加了設(shè)備成本,但降低了研發(fā)成本,大大提高了研發(fā)效率。對于有一定技術(shù)積累的公司則可以根據(jù)自身情況選擇Linux系統(tǒng)。
2.3.2 監(jiān)測系統(tǒng)工作原理
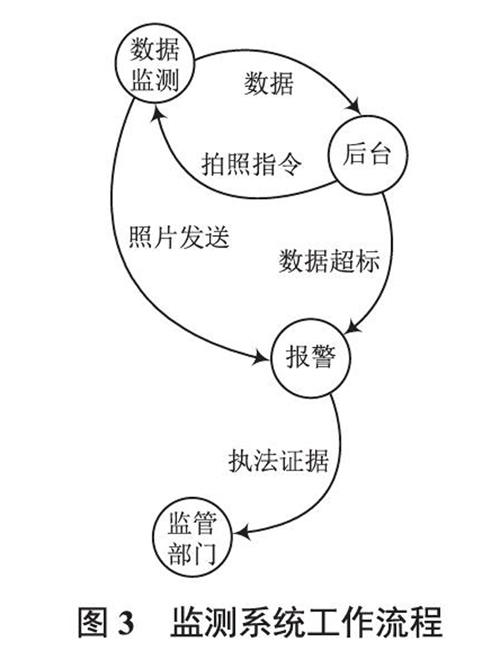
監(jiān)測系統(tǒng)軟件具有數(shù)據(jù)監(jiān)測、數(shù)據(jù)上傳、報警抓拍、后臺推送等功能,匯總的信息與后臺服務(wù)器相連。后臺采用
B/S結(jié)構(gòu),將核心模塊集中到服務(wù)器上,使用瀏覽器通過Web Server對數(shù)據(jù)庫進(jìn)行訪問。后臺服務(wù)器可以設(shè)置各模塊的數(shù)據(jù)采集間隔時間,也可以通過監(jiān)測系統(tǒng)軟件向各模塊發(fā)送最高優(yōu)先級的指令,如緊急數(shù)據(jù)上傳、攝像頭角度調(diào)整
等[7]。當(dāng)監(jiān)測系統(tǒng)軟件正常運行時,采集到的數(shù)據(jù)定時向后臺服務(wù)器傳輸,一旦現(xiàn)場的污染值超標(biāo),后臺服務(wù)器向本地監(jiān)測系統(tǒng)軟件發(fā)送拍照指令,將采集到的圖像信息立即上傳至后臺服務(wù)器,然后向相關(guān)人員或執(zhí)法監(jiān)督部門報警。監(jiān)測系統(tǒng)采集到的圖像信息會作為執(zhí)法依據(jù),一并向執(zhí)法監(jiān)督部門發(fā)送。監(jiān)測系統(tǒng)軟件工作流程如圖3所示。
2.3.3 自動重啟設(shè)置
為了保障監(jiān)測設(shè)備穩(wěn)定運行,采取以下措施:
(1)在工控機的BIOS中設(shè)置上電自動重啟,以防止現(xiàn)場斷電而導(dǎo)致設(shè)備停機;
(2)在硬盤中分別設(shè)置系統(tǒng)盤和數(shù)據(jù)盤,需要本地保存和處理的數(shù)據(jù)放在數(shù)據(jù)盤中,系統(tǒng)盤只安裝操作系統(tǒng)和監(jiān)測軟件,并且監(jiān)測軟件設(shè)置為開機自動啟動;
(3)為了避免系統(tǒng)冗余文件的累積,設(shè)定系統(tǒng)每天定時重啟,并且系統(tǒng)盤重啟后自動還原。
ARK-1124C型工控機自帶看門狗功能。看門狗是一種計數(shù)器,可由軟件設(shè)置不同的間隔時間。在系統(tǒng)正常工作時,會定時清零看門狗計數(shù)器(“喂狗”)。反之,計數(shù)器溢出(超過設(shè)置的間隔時間),產(chǎn)生一個復(fù)位信號使系統(tǒng)重啟。通過這種機制可以在程序運行出現(xiàn)故障時使系統(tǒng)強制重啟。
2.4 智能化
2.4.1 大數(shù)據(jù)智能
目前各行各業(yè)的產(chǎn)品和服務(wù)都在朝著智能化的方向發(fā)展。在環(huán)境監(jiān)測行業(yè)中,隨著物聯(lián)網(wǎng)技術(shù)和大數(shù)據(jù)技術(shù)的發(fā)展,后臺數(shù)據(jù)庫的信息日趨完善。大數(shù)據(jù)智能可以進(jìn)一步深化并利用已有信息。實現(xiàn)方法:通過對歷史數(shù)據(jù)的挖掘和比對,尋找數(shù)據(jù)與突發(fā)事件之間的因果關(guān)系及內(nèi)在邏輯,并在反復(fù)實驗的基礎(chǔ)上形成相應(yīng)的仿真模型,并利用模型對現(xiàn)場各監(jiān)測點的數(shù)據(jù)進(jìn)行匯總和綜合分析,以對突發(fā)污染事件做出預(yù)警,并對事件的發(fā)展趨勢做出科學(xué)、合理的推斷[8]。可以此為依據(jù),為問題的解決提供機器決策或輔助決策。
2.4.2 移動端的數(shù)據(jù)查看和操作
微信小程序等可以輕松的在手機或平板電腦上查看現(xiàn)場的實時數(shù)據(jù),并在出現(xiàn)污染的第一時間收到后臺推送的報警信息。在移動端上還可以操作部分現(xiàn)場設(shè)備,如洗輪機和霧炮機。建筑工地需要對進(jìn)出的渣土車進(jìn)行清洗,駕駛員無需下車即可在手機上操作,完成對洗輪機和霧炮機車輛的清洗工作。這樣操作即便捷又安全,同時后臺的操作記錄還能用來核實渣土車是否按規(guī)定進(jìn)行清洗。
2.4.3 車輛識別
監(jiān)測平臺除監(jiān)測現(xiàn)場的環(huán)境數(shù)據(jù)外,還需要監(jiān)測和記錄現(xiàn)場的車輛進(jìn)出和停放情況。針對車輛的識別,采用邊緣檢測算法及Hough直線檢測算法將攝像頭監(jiān)測場景中的車位分割,然后依據(jù)檢測的車位線來精確定位車位的具體位置[9]。識別系統(tǒng)工作時首先進(jìn)行圖像采集,然后進(jìn)行圖像預(yù)處理,之后進(jìn)入特征提取和判斷階段。如果判斷有車輛占用,在向后臺發(fā)送該車位位置信息后,此次車位檢測流程結(jié)束;如果判斷無車輛占用,則結(jié)束流程。無論是否檢測到車位占用信息,結(jié)束后系統(tǒng)將進(jìn)入圖像采集階段,開始新流程。車位檢測流程如圖4所示。
2.5 展望
針對本文中的車位識別,后期可以選用目前較為成熟的車牌算法,將車牌的識別也一起應(yīng)用到車輛識別檢測中。在確定有車輛后,進(jìn)一步識別出車輛的車牌信息,進(jìn)而對每一個時段進(jìn)出的車輛做到精確定位和記錄。對于渣土車等需要清洗的車輛更可以對比清洗前后的照片來判斷清洗效果以及號牌和車身標(biāo)識等是否清晰。
在加入人臉識別功能之后,可以讓現(xiàn)場維護人員在工作時遠(yuǎn)程打卡。設(shè)備維護人員進(jìn)入工作區(qū)域后,后臺截取上傳圖片中的面部特征信息并與公司內(nèi)部數(shù)據(jù)庫做比對,以識別對應(yīng)的工作人員。同時對于現(xiàn)場經(jīng)常出現(xiàn)的可疑人員,后臺數(shù)據(jù)庫也可記錄備案。
基于x86架構(gòu)+Windows Embedded Standard 7系統(tǒng)的組合不僅功能強大且通用性好、研發(fā)門檻低,今后還可以在環(huán)境監(jiān)測平臺的基礎(chǔ)上加入污染治理設(shè)備,如引入定時清洗和排污控制設(shè)備等,通過主控模塊控制,將監(jiān)測和治理管控集于一體。
3 平臺測試
模塊化研發(fā)平臺測試部分的主要內(nèi)容是對各模塊功能的測試,效果分別如圖5和圖6所示。氣象五參數(shù)及噪聲監(jiān)測儀等均正常工作,攝像頭也可向后臺傳送現(xiàn)場圖像信息,并通過后臺切換不同的攝像頭。本次測試中包括移動端數(shù)據(jù)的查看和對現(xiàn)場設(shè)備的遠(yuǎn)程操作,而這也恰恰是后續(xù)項目的拓展方向。
4 結(jié) 語
本文介紹了基于模塊化研發(fā)的智能環(huán)境監(jiān)測平臺,其設(shè)計方案的優(yōu)勢在于降低了研發(fā)費用、縮短了產(chǎn)品研發(fā)周期,同時還能保證產(chǎn)品質(zhì)量。為了適應(yīng)技術(shù)的不斷發(fā)展,中小型企業(yè)對于產(chǎn)品研發(fā)需要具有新的認(rèn)知,即每一個產(chǎn)品都可以拆分為多個功能模塊,每個模塊都是一個可獨立運作的子系統(tǒng)[10],不同模塊之間的選擇與組合可以組成不同的產(chǎn)品。不光研發(fā)部門,企業(yè)的管理層也要有相應(yīng)的認(rèn)知,對項目和采購采用扁平化管理,以便充分利用公司內(nèi)部資源,提高效率,為企業(yè)降低風(fēng)險與成本。一個成熟的研發(fā)平臺既可滿足現(xiàn)階段的需求,也易于今后新功能的拓展和產(chǎn)品的升級換代。
參 考 文 獻(xiàn)
[1]趙福全,劉宗巍,李贊.汽車產(chǎn)品平臺化模塊化開發(fā)模式與實施策略[J].汽車技術(shù),2017(6):1-6.
[2]劉波.汽車產(chǎn)品平臺發(fā)展趨勢簡析[A]//2009中國汽車工程學(xué)會年會,2009:1759-1763.
[3]江詩松,龔麗敏.產(chǎn)品平臺的概念、模式和管理過程[J].管理學(xué)家(學(xué)術(shù)版),2010(10):59-66.
[4]張純亞,何林,章治國.開關(guān)電源技術(shù)發(fā)展綜述[J].微電子學(xué),2016,46(2):255-272.
[5] MATTBEW S. Gast.802.11 Wireless Networks[M].北京:清華大學(xué)出版社,2002:307-314.
[6]鐘錚.基于BP神經(jīng)網(wǎng)絡(luò)的SBR污水測控技術(shù)研究[D].南昌:南昌大學(xué),2014.
[7]時宏.遼河流域水環(huán)境應(yīng)急管理指揮平臺的軟件架構(gòu)設(shè)計[J].環(huán)境保護與循環(huán)經(jīng)濟,2018(5):74-76.
[8]馬奔,毛慶鐸.大數(shù)據(jù)在應(yīng)急管理中的應(yīng)用[J].中國行政管理,2015(3):136-141.
[9] HUO H,LI D. News video text area positioning based on an improved trajkovic corner detector[J].International journal of future generation communication and networking,2016,9(11):215-228.
[10]青木昌彥,安藤晴彥.模塊時代[M].上海:上海遠(yuǎn)東出版社,2003:5-6.
猜你喜歡
海洋信息技術(shù)與應(yīng)用(2022年1期)2022-06-05 07:38:22
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:44
現(xiàn)代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統(tǒng)管理學(xué)報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(yè)(2017年4期)2017-06-21 06:29:52
流程工業(yè)(2017年4期)2017-06-21 06:29:50
石油化工建設(shè)(2015年2期)2015-12-01 04:16:44
中國教育技術(shù)裝備(2015年10期)2015-03-01 02:41:05
