基于ZigBee的智能環境清潔監控系統
2020-04-09 04:33:59夏冰清
物聯網技術 2020年3期
夏冰清

摘 要:針對室內地面環境的智能清潔監控,研究設計一種基于ZigBee技術的室內移動清潔監控系統。設計主要分為ZigBee網絡、掃地機器人和手機APP三部分,終端節點的各類傳感器收集室內地面的環境信息,將收集的信息參數發送到協調器節點,經數據處理后通過無線網絡發送至手機客戶端,以及時反映家庭地面的實際情況,從而通知用戶根據需要及時采取清潔措施。
關鍵詞:ZigBee;智能清潔;掃地機器人;手機APP;傳感器;網關
中圖分類號:TP39文獻標識碼:A文章編號:2095-1302(2020)03-00-02
0 引 言
隨著當前信息化進程的不斷發展,智能化產品已被廣泛應用于居家生活中。如今,無線網絡和智能家電取得了飛速發展,物聯網技術能夠被有效運用到智能家居領域。智能家居產品將計算機網絡、自動化系統和通信技術合為一體,將家庭裝置通過智慧家居系統聯網實現自動化管理。人們通過寬帶和無線網絡實現對家庭設備的遠程控制。考慮到現代社會人們工作繁忙,本文提出了解放人力的室內移動清潔監控系統,針對各類傳感器收集的環境信息來監控清潔過程中的實時情況并反饋給ZigBee處理器,通過ZigBee網絡將分別檢測不同內容的傳感器聯結在一起用以感知當前的位置和任務狀態,通過手機APP進行信息的查詢、接收和控制,智能解決生活問題[1]。
1 系統總體設計
本系統選擇簇-樹型網絡拓撲結構,主要包括終端節點(各種類型的傳感器)、智能設備、協調器節點、網關、無線網絡和用戶終端。系統結構如圖1所示。
1.1 信息采集系統
信息采集系統總體流程由信息采集、信息整合、任務執行三部分組成。其中,信息采集模塊包括紅外循跡模塊、超聲波傳感模塊、MPU-6050模塊、DHT11溫濕度傳感器模塊等。傳感器主要負責數據采集,通過協調器處理后反饋到數據管理系統。
1.2 執行控制系統
執行控制系統由步進電機、L298N電機驅動、微處理器和車輪等控制設備組成。通過數據管理系統做出系統分析后將判斷結果發送到手機客戶端,進行相應模塊的控制操作。L298N電機用于驅動步進電機,以控制車輪行走。微處理器采用PWM控制方式。各項模塊搭載在ZigBee網絡上,可以將控制指令及時、準確地傳送到具體器件上,實現室內地面的實時監控。
2 系統硬件設計
由于系統以ZigBee網絡為基礎,根據ZigBee網絡特點,系統硬件設計主要內容包括協調器節點的設計以及終端節點的設計。協調器節點在設計時要考慮終端節點如何利用通信技術給管理平臺傳送信息;終端節點設計時需要考慮傳感器對數據的采集和發送。
2.1 協調器節點設計
本設計的核心處理器采用CC2530芯片。CC2530 結合了技術領先的RF收發器的優良性能,為業界標準的增強型8051 CPU,系統內擁有可編程閃存與8 KB RAM,以及其他強大功能。CC2530 有四種不同的閃存版本,即CC2530F32/64/128/256,分別具有32 KB/64 KB/128 KB/
256 KB閃存。CC2530具有不同的運行模式,使得它尤其適應超低功耗要求的系統。運行模式之間的轉換時間較短,進一步確保系統可滿足低能源消耗要求,故選取該芯片作為ZigBee系統的微處理器模塊較為穩定可靠。
2.2 終端節點設計
終端節點的整體結構設計應滿足對各模塊進行管理的要求,對采集的數據進行分析、傳輸與處理,運用射頻天線進行指令的發送、接收等。終端節點整體結構主要包括CC2530模塊、傳感器、電源等。
2.3 傳感器選擇
傳感器包括MPU-6050傳感器、溫濕度傳感器、紅外線傳感器等。
MPU-6050為整合性6軸運動處理組件,相較于多組件方案,免除了組合陀螺儀與加速器時間軸之差的問題,減少了大量的封裝空間。通過集成三軸陀螺儀、三軸加速度計、數字運動處理器等精密儀器實現對物體的精密跟蹤和速度控制,還可以根據客戶的不同需求來實現大小調節,方便易操作。
溫濕度傳感器是把空氣中的溫濕度通過一定的檢測裝置測量后,按一定的規律變換成電信號或其他所需形式的信息輸出,用以滿足用戶需求。在本設計中,利用溫濕度傳感器采集外界環境信息,使用蜂鳴器實現預告與報警。在該系統上裝設有溫濕度傳感器,可檢測環境中的溫度與濕度,當采集到的溫濕度數據超過原先設定的初始值時,蜂鳴器發出警報。本設計選用 DHT11作為終端傳感器節點,該傳感器具有精度高、體積小、成本低、穩定性好、安全可靠等優點,同時外圍電路簡單,適合本設計電路。
在本設計中,由于軌跡彎曲角度不同,為了使小車能夠更加精確高效地隨黑線轉彎,在小車前部左右各裝有紅外循跡模塊,不同的物理表面顏色下紅外線反射的差異特性是實現紅外線探測的關鍵。在小車行駛過程中不斷向地面發射紅外光,當紅外光遇到白色地面時發生漫發射,反射光被裝在小車上的接收管接收;如果遇到黑線則紅外光被吸收,小車上的接收管接收不到信號。小車將根據接收到的信號產生的邏輯值自動做出相應動作,從而實現循跡功能。
3 系統軟件設計
3.1 終端節點軟件設計
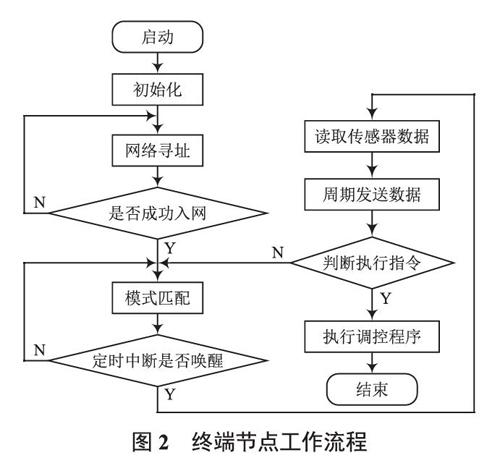
接通電源,終端節點初始化,搜尋節點所在位置是否有網絡覆蓋,如果沒有就需要進行網絡搜索。在終端進行搜索時協調器也會檢測其覆蓋范圍,兩者只要有一種成功就可以發送請求。找到ZigBee網絡后,終端節點向網絡協調器節點發送請求,如果協調器節點通過終端的入網請求,則入網操作成功。成功后,終端進入循環模式,等待定時中斷是否喚醒,讀取傳感器數據后發送至協調器,然后進入休眠模式等待下一次喚醒。如果協調器有指令發出,終端節點便執行指令,否則繼續休眠。工作流程如圖2所示。
3.2 手機APP應用程序設計
根據智能家居在環境監控中的實際應用需求,本設計中手機APP的開發平臺采用Android Studio。手機APP的工作狀態分為數據采集、數據分析、邏輯判斷共三種。ZigBee模塊啟動時開始采集數據,傳感器模塊進行數據分析,待邏輯判斷結束后進行具體處理,如果判斷出現異常,手機APP將發出消息,方便用戶及時了解。
3.3 系統測試
本測試主要針對機器人的清掃性能。在測試過程中,機器人對于規避障礙物的能力極強,可較好地行走,適合家庭環境。由測試數據可知,該機器人的清掃速度和一次裝水后可以拖地的面積完全滿足日常使用。當傳感器采集到地面濕度信息處于正常值時,手機APP上顯示當前濕度,此時處于正常狀態,顯示界面如圖3所示。
當傳感器檢測到濕度超過正常值時,便處于異常狀態,手機APP上顯示當前濕度,但機器人不受影響可以正常工作,顯示界面如圖4所示。
當地面存在大量積水時,傳感器采集信息,若判斷為地面存在無法清理的積水時,上機位發送指令讓機器人停止工作,并向手機APP發送積水警報。
4 結 語
本文針對日常家居環境,設計了一種智能環境監控系統,在傳統的智能產品上進行升級改造,利用ZigBee技術、STM32技術等,結合手機APP客戶端將家庭實時環境情況傳達給用戶。本設計網絡覆蓋范圍廣、性能穩定、性價比高、可靠性與實時性強。相比傳統的家庭環境監控系統更加靈活,同時基于ZigBee網絡的特殊性,本系統后期升級改造較方便。
參 考 文 獻
[1]周文麟.城市無障礙環境設計[M].北京:科學出版社,2000.
[2]魯玉軍,馮燕.基于STM32智能家居系統的無線網關設計[J].工業控制計算機, 2017(8):50-51.
[3]曹凱凌,譚玉婷.基于STM32單片機的寢室掃地機器人[J].電子制作,2018(9):3-5.
[4]徐勝華.基于STM32的智能掃地機器人研究與設計[D].桂林:廣西師范大學,2016.
[5]鄧云偉.輪式移動機器人運動控制技術研究[D].哈爾濱:哈爾濱工程大學,2016.
[6]杜德飛.智能家居無線系統設計及實現[D]. 廣州:華南理工大學,2012.
[7]李萬林.基于ZigBee的無線溫度傳感器網絡系統的研究[D].西安:長安大學,2013.
[8]仲偉波,王婷婷,張澤武.基于ZigBee與WiFi的環境智能傳感系統研制[J].農機化研究,2012(12):186-189.
[9]閆廷光,肖豐霞.基于ZigBee技術的智能環境監測系統[J].信息技術與信息化,2014(12):102-103.
[10]魯楠,楊東凱,吳興躍.基于ZigBee的智能家居環境監測報警系統設計[J].計算機工程與應用,2014,50(S1):329-334.
