基于ROS的無人派件機器人設計
2020-04-09 04:33:59林宏偉陳琪媚曾仕峰曾啟正陳濤邱斯杰黃奕秋孫海升林杰劉宇亮
物聯網技術 2020年3期
林宏偉 陳琪媚 曾仕峰 曾啟正 陳濤 邱斯杰 黃奕秋 孫海升 林杰 劉宇亮

摘 要:針對校園快遞人工派送存在的安全問題,設計一款基于ROS的無人派件機器人。此機器人采用調用ROS機器人開源操作系統的模塊功能包的方式和人工遠程監控的方式實現了無人派送快件的目的。通過測試機器人的路線規劃較好地實現了預期目標,完成了派件機器人自動規劃路線,實現了派件機器人自動控制。此機器人結構設計合理,安全性高,可操作性強,可大規模投入生產和使用,有廣泛的應用前景和潛在的市場價值。
關鍵詞:ROS機器人;校園快遞;無人派送;規劃路線;自動控制;遠程監控
中圖分類號:TP242.6文獻標識碼:A文章編號:2095-1302(2020)03-00-02
0 引 言
隨著電商、零售等業態發展,我國單日快遞量過億的情況已常態化,尤其是校園地帶,傳統的投遞方式越來越難以滿足日益增長的服務需求,同時適齡勞動力人口下降及人工成本配送難的現狀加速了業務環節的自動化和無人化。在校園派件既要保證派件速度也要保證派件過程的安全,針對校園快遞人工派送存在的安全問題,本文設計了一款基于ROS的無人派件機器人,車載雷達實時掃描、更新派件環境情況,主控控制四輪雙排全向輪底盤靈活移動,再結合網絡攝像頭,準確規避障礙物,使其精確導航至目的地。路線導航規劃基本實現無人化配送,這種配送模式提升了物流網點與終端之間的流轉效率,也是快遞行業進步的需要。
1 無人派件機器人整體設計
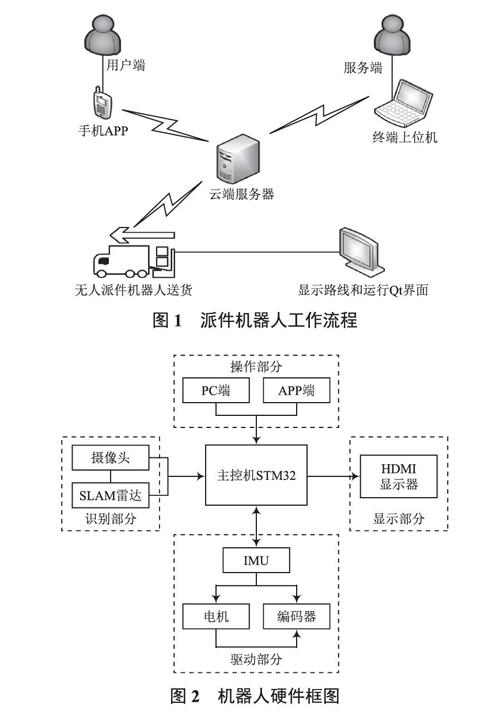
本無人派件機器人工作流程如圖1所示。快遞員在服務端操作上位機,監控派件情況和操作機器人派件,用戶通過手機APP查看物流以及操作延遲收貨或者確認收貨,機器人接收服務端和用戶端指令后開始工作,并且顯示基本路線圖在機器人顯示屏上。本無人派件機器人包括軟件應用層和硬件控制層。軟件應用層包括用戶APP和服務端上位機;硬件控制層包括硬件系統和機器人結構。
2 硬件控制層
2.1 硬件系統設計
如圖2所示,無人派件機器人分為操作部分、驅動部分、識別部分和顯示部分。主控機STM32安裝有Linux系統,在Linux系統上搭建ROS機器人開源操作系統,主控機負責的任務有:接收PC端和APP端發送過來的指令;執行雷達建圖和導航算法;配合IMU慣性測量單元驅動編碼器電機;搭配HDMI顯示屏顯示數據。
2.1.1 識別部分
識別部分是由SLAM雷達和攝像頭模塊組成,主要是識別地圖。此機器人搭載的SLAM激光雷達掃描半徑為
40 m,掃描范圍大。SLAM激光雷達的作用是建立地圖模型,結合里程計進行導航和自主規劃路線。此機器人采用了基于SLAM激光雷達和里程計的Gmapping算法,實現了自動導航和自主規劃路線的目標。Gmapping算法根據SLAM激光雷達掃描獲取到的地圖數據和里程計提供的信息,對地圖進行構建,并且可以估計機器人的位置信息。Gmapping信息流向圖如圖3所示。輸入端的/td和/tf_static為坐標變換的數據,即里程計的信息,輸入端的/scan為雷達掃描的數據;輸出端的/map是雷達構建出來的地圖模型,/map_matedata為地圖模型的信息。即通過給機器人輸入里程計信息和雷達掃描的信息,結合Gmapping算法輸出構建的地圖模型以及地圖模型的相關信息。
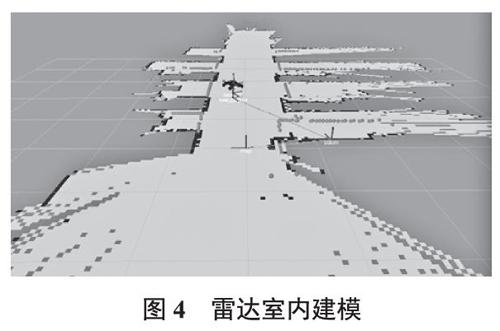
以室內為例,利用SLAM激光雷達建立的地圖模型圖效果如圖4所示。該機器人建立的模型地圖是一張灰度圖像,圖中黑色代表著障礙物,灰色代表著未知區域,白色代表著可行區域。在機器人建立地圖模型的時候,可以通過RVIZ觀察到地圖慢慢建立的過程。此機器人構建的地圖信息是導航和自動規劃路線必不可少的。機器人自動導航是基于已經建立完成的地圖模型,以建立完成的地圖模型為判斷基礎,與檢測的地圖模型進行匹配對比,若兩個地圖存在不同點則判斷有障礙。
攝像頭的作用是掃描障礙。在此派件機器人上搭建網絡攝像頭,該攝像頭用于識別動態物體,對于移動較快的物體,雷達的反饋比較慢。故采用“雷達+攝像頭”識別模式,雷達主要負責地圖模型建立以及模型匹配,攝像頭負責識別動態物體。攝像頭識別動態物體是基于幀數差算法,即攝像頭識別前后的圖像幀數,先將圖像二值化后,再通過圖像的幀數檢測動態物體。
2.1.2 驅動部分
此無人派件機器人是選用帶編碼器的直流電機作為驅動電機,選用GY-85九軸IMU傳感器作為該無人機器人的慣性測量模組。利用GY-85傳感器實時獲取機器人的運動姿態,并且將機器人的姿態數據通過串口發送到STM32主控機,STM32驅動編碼器,調整每個電機的運動速度。
2.2 機器結構設計
2.2.1 整體結構設計
整體結構設計如圖5所示。無人派件機器人頂部的識別單元將收集到的信息傳到底部的移動單元,進而精準移動到目的地,并在與用戶交互滿足取件條件后從中間的儲物單元中取件。在滿足車身強度要求下,選擇不易生銹的鋁合金板作為移動單元的車體底盤,同時鋁合金板還具有密度低、價格低廉等特性。其中儲物單元為已有方案的快遞柜替換而成,其大小高度可變化,外部的支撐架選用碳纖維骨架作為主要支架,具備質量輕、硬度大的特點。
2.2.2 底盤機械設計
全向輪的材料為尼龍耗材,載重量可達到20 kg,雙排全向輪除了可以繞輪轂轉動外,小滾輪也可以繞其自身的輪軸轉動,使其輕松實現任意方向的自由運動,此外全向輪無需潤滑或現場維護,其安裝選項非常簡單和穩定,而雙板的全向輪具有滾筒之間沒有死區的優勢。
在全向輪與車體連接處增加一個減震系統。減震系統是由彈簧和減震器共同組成,減震器抑制彈簧吸震后反彈時的震蕩,并且吸收車輪與路面沖擊產生的能量,彈簧起緩和沖擊的作用。底盤由四個雙排全向輪以中心對稱結構分布在車身底端,每個輪軸上配有一個減震系統,其結構如圖6所示。全方位移動結構可以利用車輪本身具有的定位和定向功能,實現可在二維平面上從當前位置向任意方向運動而不需要改變姿態車體,在許多需要精確定位和高精度軌跡跟蹤時,還可以對自身的位置進行調整。
3 結 語
針對校園快遞人工派送存在的安全問題,本文設計一款基于ROS的無人派件機器人。在此機器人主控上搭建ROS操作系統以及結合激光雷達和Opencv算法,實現無人派送快件的目的。通過室內測試機器人的路線規劃較好地實現了預期目標,完成了派件機器人自動規劃路線,實現了派件機器人自動控制。此機器人結構設計合理,安全性高,可操作性強,有利于大規模生產和使用,應用前景廣泛。
參 考 文 獻
[1]勒國慶,班乾乾.基于STM32的智能小車設計[J].福建電腦,2018,34(7):123-125.
[2]呂閃,金巳婷,沈巍.基于STM32的循跡避障智能小車的設計
[J].計算機與數字工程,2017,45(3):549-552.
[3]王楠,查志敏.基于STM32單片機的智能搬運小車設計[J].大慶師范學院學報,2017,37(6):14-17.
[4]林智驊,平雪良,金登峰,等.基于STM32的全方位移動平臺設計和控制[J].電子測量技術,2016,39(1):19-21.
[5]陳劭,郭宇翔,高天嘯,等.移動機器人RGB-D視覺SLAM算法
[J].農業機械學報,2018,49(10):38-45.
[6]洪亮. 基于深度相機的移動機器人SLAM算法研究[D].成都:中國科學院大學,2018.
[7]鄭燦濤. 基于激光雷達的室內移動機器人自主導航與行人跟蹤研究[D].廣州:華南理工大學,2018.
[8]王旒軍,陳家斌,余歡,等.RGB-D SLAM綜述[J].導航定位與授
時,2017,4(6):9-18.
[9]唐梓敖,石皓宇,鄧涵文.模塊化嵌入式人工智能軟件的開發[J].電子技術與軟件工程,2019(9):49.
[10]謝萌,張世武,李旺,等.基于ROS的遠程車輛控制和目標跟隨系統設計[J].工業控制計算機,2019(7):29-31.
[11]曾啟正,陳濤,曾仕峰,等.基于云控制的智能派件系統設計
[J].物聯網技術,2019,9(6):106-108.
